
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Учебное пособие: Тиристорные преобразователи частоты: назначение, типы, структурная схема. Коротко о частотно-регулируемом приводе
Учебное пособие: Тиристорные преобразователи частоты: назначение, типы, структурная схема. Коротко о частотно-регулируемом приводе
Тиристорные преобразователи частоты: назначение, типы, структурная схема.
Коротко о частотно-регулируемом приводе
Введение
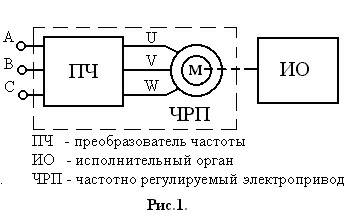
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (см. рис.1.).
Электрический двигатель преобразует электрическую энергию в механическую энергию и приводит в движение исполнительный орган технологического механизма.
Преобразователь частоты управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой.
Название «частотно регулируемый электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10 –15 лет в мире наблюдается широкое и успешное внедрение частотно регулируемого электропривода для решения различных технологических задач во многие отрасли экономики. Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором IGBT.
В настоящей статье коротко описаны известные сегодня типы преобразователей частоты, применяемые в частотно регулируемом электроприводе, реализованные в них методы управления, их особенности и характеристики.
При дальнейших рассуждениях будем говорить о трехфазном частотно регулируемом электроприводе, так как он имеет наибольшее промышленное применение.
О методах управления
В синхронном электрическом двигателе частота вращения ротора ![]() в
установившемся режиме равна частоте вращения магнитного поля статора
в
установившемся режиме равна частоте вращения магнитного поля статора ![]()
В асинхронном
электрическом двигателе частота вращения ротора ![]() в установившемся режиме отличается
от частоты вращения
в установившемся режиме отличается
от частоты вращения ![]() на величину скольжения
на величину скольжения ![]() .
.
Частота
вращения магнитного поля ![]() зависит от частоты напряжения
питания. При питании обмотки статора электрического двигателя трехфазным
напряжением с частотой
зависит от частоты напряжения
питания. При питании обмотки статора электрического двигателя трехфазным
напряжением с частотой ![]() создается вращающееся
магнитное поле. Скорость вращения этого поля определяется по известной формуле
создается вращающееся
магнитное поле. Скорость вращения этого поля определяется по известной формуле
![]() =
= ![]() ,
,
где ![]() – число пар
полюсов статора.
– число пар
полюсов статора.
Переход
от скорости вращения поля ![]() , измеряемой в радианах, к частоте
вращения
, измеряемой в радианах, к частоте
вращения ![]() ,
выраженной в оборотах в минуту, осуществляется по следующей формуле
,
выраженной в оборотах в минуту, осуществляется по следующей формуле
![]() =
= ![]() ,
,
где 60 – коэффициент пересчета размерности.
Подставив в
это уравнение скорость вращения поля, ![]() получим, что
получим, что
![]() =
= ![]() .
.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя
с помощью преобразователя частоту ![]() на входе двигателя, мы регулируем
частоту вращения ротора.
на входе двигателя, мы регулируем
частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
![]() =
= ![]() ,
,
где ![]() - постоянный
коэффициент.
- постоянный
коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
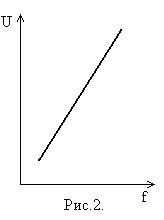
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
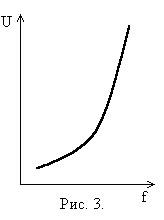
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
О преобразователях частоты
Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
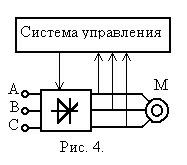
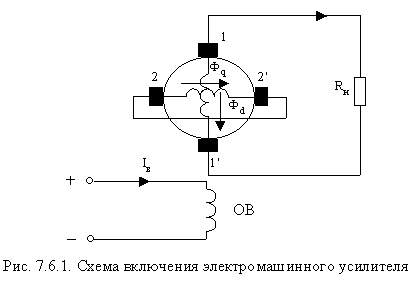
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.
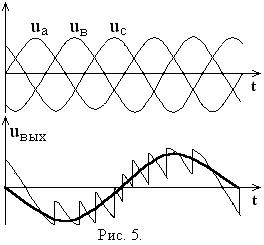
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе преобразователя действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
- практически самый высокий КПД относительно других преобразователей (98,5% и выше),
- способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах,
- относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
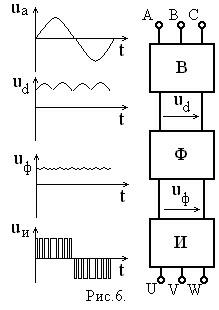
Наиболее широкое применение в современных частотно регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока (рис. 6.).
В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 - 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая неэнергоемкая система управления, самая высокая рабочая частота
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в преобразователях частоты снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных преобразователей, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента преобразователя.
Переменное напряжение питающей сети (uвх.) с постоянной амплитудой и частотой (Uвх = const, fвх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение ud поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
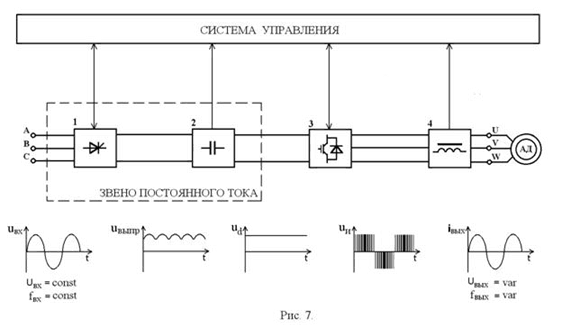
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение uи изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя. Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (Uвых = var, fвых = var).
Типовые схемы высоковольтных преобразователей частоты
В последние годы многие фирмы большое внимание, которое диктуется потребностями рынка, уделяют разработке и созданию высоковольтных частотных преобразователей. Требуемая величина выходного напряжения преобразователя частоты для высоковольтного электропривода достигает 10 кВ и выше при мощности до нескольких десятков мегаватт.
Для таких напряжений и мощностей при прямом преобразовании частоты применяются весьма дорогие тиристорные силовые электронные ключи со сложными схемами управления. Подключение преобразователя к сети осуществляется либо через входной токоограничивающий реактор, либо через согласующий трансформатор.
Предельные напряжение и ток единичного электронного ключа ограничены, поэтому применяют специальные схемные решения для повышения выходного напряжения преобразователя. Кроме того, это позволяет уменьшить общую стоимость высоковольтных преобразователей частоты за счет использования низковольтных электронных ключей.
В преобразователях частоты различных фирм производителей используются следующие схемные решения.
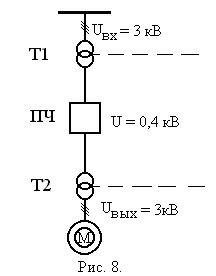
1. Двухтрансформаторная схема высоковольтного преобразователя частоты
В схеме преобразователя (рис. 8.) осуществляется двойная трансформация напряжения с помощью понижающего (Т1) и повышающего (Т2) высоковольтных трансформаторов.
Двойная трансформация позволяет использовать для регулирования частоты относительно дешевый низковольтный преобразователь частоты, структура которого представлена на рис. 7.
Преобразователи отличают относительная дешевизна и простота практической реализации. Вследствие этого они наиболее часто применяются для управления высоковольтными электродвигателями в диапазоне мощностей до 1 – 1,5 МВт. При большей мощности электропривода трансформатор Т2 вносит существенные искажения в процесс управления электродвигателем. Основными недостатками двухтрансформаторных преобразователей являются высокие массогабаритные характеристики, меньшие по отношению к другим схемам КПД (93 – 96%) и надежность.
Преобразователи, выполненные по этой схеме, имеют ограниченный диапазон регулирования частоты вращения двигателя как сверху, так и снизу от номинальной частоты.
При снижении частоты на выходе преобразователя увеличивается насыщение сердечника и нарушается расчетный режим работы выходного трансформатора Т2. Поэтому, как показывает практика, диапазон регулирования ограничен в пределах nном>n>0,5nном. Для расширения диапазона регулирования используют трансформаторы с увеличенным сечением магнитопровода, но это увеличивает стоимость, массу и габариты.
При увеличении выходной частоты растут потери в сердечнике трансформатора Т2 на перемагничивание и вихревые токи.
В приводах мощностью более 1 МВт и напряжении низковольтной части 0,4 – 0,6 кВ сечение кабеля между преобразователем частоты и низковольтной обмоткой трансформаторов должно быть рассчитано на токи до килоампер, что увеличивает массу преобразователя.
2. Схема преобразователя с последовательным включением электронных ключей
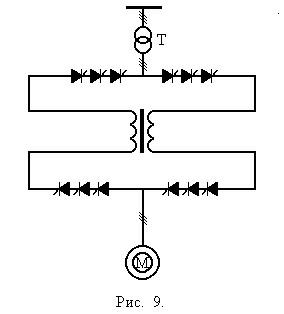
Для повышения рабочего напряжения преобразователя частоты электронные ключи соединяют последовательно (см. рис.9.).
Число элементов в каждом плече определяется величиной рабочего напряжения и типом элемента.
Основная проблема для этой схемы состоит в строгом согласовании работы электронных ключей.
Полупроводниковые элементы, изготовленные даже в одной партии, имеют разброс параметров, поэтому очень остро стоит задача согласования их работы по времени. Если один из элементов откроется с задержкой или закроется раньше остальных, то к нему будет приложено полное напряжение плеча, и он выйдет из строя.
Для снижения уровня высших гармоник и улучшения электромагнитной совместимости используют многопульсные схемы преобразователей. Согласование преобразователя с питающей сетью осуществляется с помощью многообмоточных согласующих трансформаторов Т.
На рис.9. изображена 6-ти пульсная схема с двухобмоточным согласующим трансформатором. На практике существуют 12-ти, 18-ти, 24-х пульсные схемы преобразователей. Число вторичных обмоток трансформаторов в этих схемах равно 2, 3, 4 соответственно.
Схема является наиболее распространенной для высоковольтных преобразователей большой мощности. Преобразователи имеют одни из лучших удельные массогабаритные показатели, диапазон изменения выходной частоты от 0 до 250-300 Гц, КПД преобразователей достигает 97,5%.
3. Схема преобразователя с многообмоточным трансформатором
Силовая схема преобразователя (рис.10.) состоит из многообмоточного трансформатора и электронных инверторных ячеек. Количество вторичных обмоток трансформаторов в известных схемах достигает 18. Вторичные обмотки электрически сдвинуты относительно друг друга.
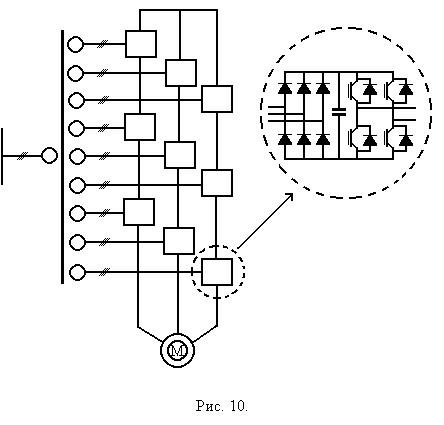
Это позволяет использовать низковольтные инверторные ячейки. Ячейка выполняется по схеме: неуправляемый трехфазный выпрямитель, емкостной фильтр, однофазный инвертор на IGBT транзисторах.
Выходы ячеек соединяются последовательно. В приведенном примере каждая фаза питания электродвигателя содержит три ячейки.
По своим характеристикам преобразователи находятся ближе к схеме с последовательным включением электронных ключей.
Специальные машины постоянного тока (МПТ): электромашинный усилитель (ЭМЦ), тахогенератор, назначение, устройство, принцип работы.
Специальные машины постоянного тока
Универсальный коллекторный двигатель. Исполнительные двигатели постоянного тока. Магнитогидродинамический генератор. Тахогенератор. Электромашинный усилитель. Униполярный генератор. Вентильные двигатели.
Какие бывают электрические двигатели и где они применяются?
Электрические двигатели бывают постоянного и переменного тока (рис. 2). Наиболее распространены электрические двигатели переменного тока. Они просты по устройству, неприхотливы в эксплуатации. Основной недостаток — практически не регулируемая частота вращения.
Электрические двигатели переменного тока изготавливают одно- и многофазными. Основные элементы таких двигателей — статор (неподвижная часть) и ротор (вращающаяся часть). Выпускаются электродвигатели с коротко замкнутыми обмотками ротора (типа беличьей клетки) и обмотками, выведенными на коллектор (систему контактных колец) и замыкающимися через регулируемые резисторы. Такие роторы называют фазными, а электродвигатели — электродвигателями с фазным ротором.
Электрические двигатели переменного тока применяют для привода рабочих машин различного назначения (насосы, деревообрабатывающие станки, дробилки и т. д.), не требующих регулирования частоты вращения. Выпускаются на мощности от 0, 2 до 200 и более киловатт.
Электродвигатели постоянного тока состоят из подвижной части (якоря) и неподвижной части (статора). Они выпускаются с параллельным, последовательным и смешанным соединением обмоток якоря и статора. Достоинством двигателей постоянного тока является способность регулировать частоту вращения, но они требуют значительных усилий при эксплуатации.
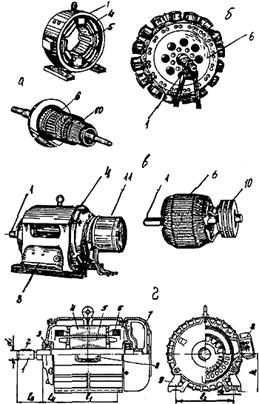
Рис. 2. Электрические двигатели: а — постоянного тока; б — синхронные; в ~ асинхронные с фазным ротором; г — асинхронные трехфазные с коротко замкнутым ротором серии 4А. 1 — вал, 2 ~ шпонка, 3 —подшипник, 4 — статор, 5 — обмотка статора, 6 — ротор (якорь); 7 — вентилятор; 8 — коробка выводов; 9 — лапа, 10 — коллектор; 11 — щетки; l1, l2 — продольное и поперечное расстояния в лапах; l3 — длина выступающего конца вала; l4. — размер выступающей крышки; h — высота оси вращения; d1, d2 — диаметры вала и отверстий в лапах.
Универсальные коллекторные двигатели применяются в промышленных и бытовых электроустановках (электрифицированный инструмент, вентиляторы, холодильники, соковыжималки, мясорубки, пылесосы и др.). Они рассчитаны для работы как от сети постоянного тока (110 и 220 В), так и от сети переменного тока частотой 50 Гц (127 и 220 В). Эти двигатели имеют большой пусковой момент и сравнительно малые размеры.
По своему устройству универсальные коллекторные двигатели принципиально не отличаются от двухполюсных двигателей постоянного тока с последовательным возбуждением.
В универсальных коллекторных двигателях не только якорь набирается из листовой электротехнической стали, но и неподвижная часть магнитопровода (полюса и ярмо).
Обмотка возбуждения этих двигателей включается с обеих сторон якоря. Такое включение (симметрирование) обмотки позволяет уменьшить радиопомехи, создаваемые двигателем.
Для получения примерно одинаковых частот вращения при номинальной нагрузке как на постоянном, так и на переменном токе обмотку возбуждения выполняют с ответвлениями: при работе двигателя от сети постоянного тока обмотку возбуждения используют полностью, а при работе от сети переменного тока — лишь частично.
Вращающий момент создается за счет взаимодействия тока в обмотке якоря (ротора) с магнитным потоком возбуждения.
Эти двигатели выпускаются на сравнительно небольшие мощности — от 5 до 600 Вт (для электроинструмента — до 800 Вт) и частоты вращения — 2770 — 8000 об/мин. Пусковые токи таких двигателей невелики, поэтому их в сеть включают непосредственно без пусковьк сопротивлений. Универсальные коллекторные двигатели имеют минимум четыре вывода: два для подключения к сети переменного тока и два для подключения к сети постоянного тока. КПД универсального двигателя на переменном токе ниже, чем на постоянном. Это вызвано повышенными магнитными и электрическими потерями. Величина тока, потребляемого универсальным двигателем при работе на переменном токе, больше, чем при работе этого же двигателя на постоянном токе, так как переменный ток помимо активной составляющей имеет еще и реактивную составляющую.
Частоту вращения таких двигателей регулируют, изменяя подводимое от сети напряжение, например, автотрансформатором, а у двигателей небольшой мощности — реостатом.
Однофазный коллекторный двигатель нельзя пускать в ход при малой нагрузке, потому что он может пойти «вразнос».
Отечественная промышленность выпускает универсальные коллекторные двигатели серий УЛ, МУН, УМТ, ДТА-4, УВ, М-1Д, ЭП, УД, Д2-03, ЭПП-1 и др.
ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
![]()
Электрические микромашины автоматических устройств гораздо разнообразнее микромашин общепромышленного применения, что объясняется спецификой выполняемых ими функций. Для них характерно не силовое преобразование энергии, а преобразование одной величины в другую. Например, электрического сигнала в механическое перемещение, углового смещения в напряжение и т.д.
Такие показатели работы, как КПД, cosj, полезная мощность, весьма важные для силовых электрических машин общего применения, здесь оказываются несущественными. Главными являются требования высокой точности работы, хорошего быстродействия, надежности и стабильности характеристик.
Микромашины автоматических устройств можно разделить на следующие группы:
1)исполнительные или управляемые микродвигатели;
2)информационные микромашины;
3)электромашинные усилители;
4)электрические микромашины гироскопических систем.
1. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
Исполнительными (управляемыми) двигателяминазываются электромеханические устройства, преобразующие электрический сигнал в механическое вращение вала. Такие двигатели являются очень важными элементами систем автоматики и телемеханики. От качества их работы во многом зависит качество работы всей, порой очень сложной системы.
Главные требования, предъявляемые к исполнительным двигателям:
· отсутствие самохода - вращение двигателя при отсутствии сигнала управления;
· широкий диапазон регулирования частоты вращения;
· устойчивость работы во всем диапазоне угловых скоростей;
· высокое быстродействие;
· максимальная линейность механических и регулировочных характеристик;
Особенность исполнительных двигателей заключается в том, что они практически никогда не работают в установившимcя режиме. Для них характерны частые пуски, реверсы, остановы и другие переходные режимы. В конструктивном отношении это закрытые машины, в большинстве случаев без вентилятора. Последний не нужен по причине малой эффективности в переходных режимах и нежелания увеличивать момент инерции.
В зависимости от питающего напряжения исполнительные двигатели подразделяются на три группы:
1) асинхронные исполнительные двигатели;
2) исполнительные двигатели постоянного тока;
3) шаговые двигатели.
Почти все исполнительные двигатели (за малым исключением) имеют две обмотки. На одну из них - обмотку возбуждения (ОВ), напряжение подается постоянно, на другую - обмотку управления (ОУ), напряжение подается лишь на время отработки перемещения.
2. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
![]()
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление.
3. Якорное управление исполнительным двигателем
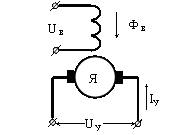
Рис. 2.1. Схема включения исполнительного двигателя при якорном управлении
Схема включения двигателя с якорным управлением показана на рис. 2.1. Напряжение возбуждения подается на обмотку полюсов, напряжение управления - на обмотку якоря. Коэффициент сигнала a здесь равен a = Uу/Uв. Для двигателей с постоянными магнитами a = Uу/Uу.ном. Регулирование частоты вращения осуществляется изменением напряжения управления.
Регулировочные характеристикилинейные. Напряжение трогания пропорционально моменту нагрузки. Линейность механических и регулировочных характеристик является важным достоинством якорного управления.
Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока.
В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей.
Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же - она небольшая по величине, что также характерно для машин постоянного тока.
Максимум механической мощности в сильной степени зависит от коэффициента сигнала и даже при a = 1 не превышает 1/4 базовой мощности.
4. Полюсное управление исполнительным двигателем
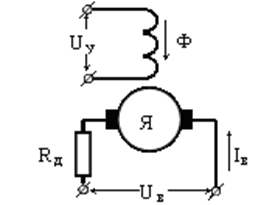
Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении
Схема управления приведена на рис.2.4 Напряжение управления подается на обмотку главных полюсов, напряжение возбуждения - на обмотку якоря, по которой в течение всего времени работы двигателя протекает ток возбуждения.
Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения.
ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ
Простейшим усилителем мощности является обычный генератор постоянного тока с независимым возбуждением. Коэффициент усиления машины определяется отношением тока, протекаемого в обмотке якоря, к току возбуждения:
![]()
В таком исполнении коэффициент усиления равен порядка 15 - 30.
Усилительную способность генератора можно увеличить, если использовать каскадную схему включения генераторов. В этом случае с выхода первого генератора подключается обмотка возбуждения второго, а выход со второго генератора будет превышать по мощности вход первого в 1000 и более раз.
Каскадная схема применяется редко из-за своей громоздкости и дороговизны.
Чаще используют так называемые электромашинные усилители (ЭМУ). Электрическая схема ЭМУ приведена на рис. 7.6.1.
Конструктивно электромашинный усилитель представляет собой коллекторную машину постоянного тока с независимым возбуждением, имеющую два комплекта щеток (продольные 1-1' и поперечные 2-2').
Ток, протекающий по обмотке возбуждения Iв, создает продольный магнитный поток Фd, направленный по оси полюсов машины. При вращении якоря на поперечных щетках 2-2' появляется ЭДС Е2 = С n Фd Так как они замкнуты накоротко, то в обмотке якоря появляется большой ток I2. Этот ток создает в обмотке якоря сильное поперечное магнитное поле реакции якоря Фq, неподвижное в пространстве и направленное по оси щеток 2-2'. Под действием магнитного потока Фq в якорной обмотке ме-жду щетками 1-1' возникает ЭДС Е1 = С n Фq >>Е2, так как Фq >>Фd. При подключении к щеткам 1-1' нагрузки Rн в цепи потечет ток Iя превышающий ток Iв в десятки тысяч раз. Электромашинные усилители применяют для автоматического управления мощными электродвигателями.
В зависимости от конструкции и способа возбуждения ЭМУ подразделяются на следующие типы:
1) с независимым возбуждением;
2) со смешанным возбуждением;
3) со специальной ориентацией магнитных потоков.
ЭМУ с независимым возбуждением представляет собой обычный генератор постоянного тока, обмотка возбуждения которого питается от регулируемого источника напряжения. Выходное напряжение ЭМУ с независимым возбуждением с достаточной степенью точности линейно зависит от скорости вращения его ротора. ЭМУ с независимым возбуждением дает возможность управлять значительными мощностями нагрузки при незначительных затратах мощности в обмотке управления. Коэффициент усиления по мощности для некоторых типов ЭМУ с независимым возбуждением может достигать значений 100 и более. Постоянная времени обмоток возбуждения обычно составляет десятые доли секунды.
ЭМУ со смешанным возбуждением представляет собой генератор постоянного тока, работающий в режиме самовозбуждения. ЭМУ со смешанным возбуждением отличаются от усилителей с независимым возбуждением тем, что необходимая для создания магнитного потока возбуждения мощность почти целиком поступает с выхода по цепи положительной обратной связи. Вследствие этого результирующий коэффициент усиления системы может быть достаточно большим.
Для третьего типа ЭМУ классификационными признаками являются число ступеней усиления и ориентация управляющего магнитного потока второй (и третьей) ступени усиления по отношению к управляющему магнитному потоку первой ступени усиления. По числу ступеней усиления ЭМУ подразделяются на одно-, двух-и трехступенчатые. По ориентации управляющего магнитного потока второй ступени двух- и трехступенчатые ЭМУ подразделяются на ЭМУ с поперечным, с продольным полем и с продольно-поперечным полем.
ЭМУ с поперечным полем представляет собой специальный генератор постоянного тока с якорем, выполненным по типу якорей обычных машин постоянного тока, но с дополнительной парой поперечных короткозамкнутых щеток (см. рис. 14.55). Благодаря такой конструкции ЭМУ с поперечным полем требует для возбуждения мощность, в десятки раз меньшую, чем соответствующая мощность возбуждения обычных генераторов. На статоре ЭМУ расположены одна или не- . сколько обмоток управления (на рис. 14.55 показана только одна обмотка Wy), обмотка дополнительных полюсов и компенсационная обмотка.
В ЭМУ с поперечным полем магнитный поток управления второй ступенью усиления расположен перпендикулярно к магнитному потоку управления первой ступенью. Так как принято считать, что магнитный поток первой ступени, создаваемый входной управляющей обмоткой, направлен по продольной оси ЭМУ (перпендикулярно рис. 14.55), то магнитный поток управления второй ступени направлен по поперечной оси ЭМУ. Поэтому этот класс двухступенчатых ЭМУ и получил название ЭМУ с поперечным полем.
При подаче на обмотку управления Wy сигнала управления в ЭМУ возникает продольный магнитный поток управления. В витках вращающегося с постоянной скоростью ротора (якоря) наводится ЭДС, при этом наибольшего значения она достигает в витках, расположенных в продольной плоскости ЭМУ. Напряжение этой ЭДС снимается поперечными щетками 1 (см. рис. 14.55). Поскольку они закорочены и сопротивление цепи мало, то в цепи протекает достаточно большой ток, что приводит к формированию значительного по величине поперечного магнитного потока. Этот процесс называется реакцией якоря по поперечной цепи (первая ступень усиления ЭМУ). Под действием усиленного таким образом магнитного потока в витках вращающегося якоря ЭМУ наводится ЭДС, максимальная величина которой имеет место в витках, расположенных в плоскости этого потока, т.е. в поперечной плоскости ЭМУ. Напряжение этой ЭДС, снимаемое продольными щетками 2, является выходным сигналом ЭМУ (вторая ступень усиления). Поскольку при подключенной нагрузке по поперечным виткам якоря ЭМУ протекает ток, то под действием этого тока в ЭМУ создается магнитный поток, направленный по продольной оси навстречу потоку. Это так называемая реакция якоря ЭМУ по продольной оси. Таким образом, в продольной оси ЭМУ будет действовать некоторый результирующий магнитный поток, который является функцией не только управляющего напряжения в обмотке Wy, но и параметров нагрузки. Для уменьшения противодействующего магнитного потока в статоре ЭМУ используется компенсационная обмотка, с помощью которой достигается компенсация продольной реакции якоря.
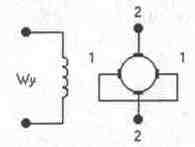
Рис. 14.55. Упрощенная схема ЭМУ с поперечным полем
ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
Для преобразования переменного тока в постоянный, как известно, используют выпрямители. Преобразование постоянного тока в переменный можно осуществить электромашинными преобразователями. Каскад из двух машин: (асинхронный двигатель переменного тока и генератор постоянного тока) вполне решают эту задачу.
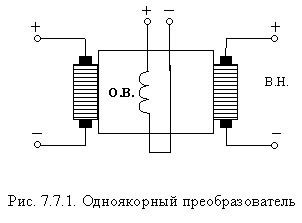
Но бывает ситуация, когда необходимо преобразовать постоянный ток низкого напряжения в постоянный ток повышенного напряжения. Делается это в одной комбинированной машине, состоящей из двигателя и генератора постоянного тока с общей магнитной системой. Со стороны низкого напряжения это электродвигатель, а со стороны повышенного напряжения - генератор постоянного тока с независимым возбуждением.
В одних и тех же пазах якоря преобразователя заложены самостоятельные обмотки низкого и повышенного напряжения. Концы обмоток присоединены к соответствующему коллектору (рис. 7.7.1), причем обмотка повышенного, напряжения имеет значительно большее число проводников, чем обмотка низкого напряжения.
Одноякорные преобразователи широко применяются в авиационной технике, а также в общепромышленных установках, где первичным источником постоянного тока является аккумулятор.
Одноякорные преобразователи постоянного тока в трехфазный переменный отличается от рассмотренного тем, что обмотка повышенного напряжения состоит из
трех секций, смещенных друг от друга на 120°. Выводы секционных обмоток припаяны к трем контактным кольцам и с помощью токосъемных щеток переменный ток передается к потребителю.
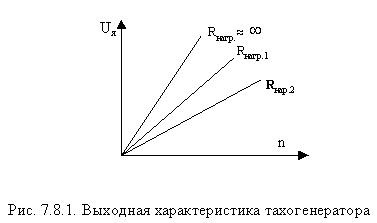
ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Тахогенераторами называют электрические машины малой мощности, работающие в генераторном режиме и служащие для преобразования частоты его вращения в электрический сигнал.
Тахогенераторы постоянного тока по принципу действия и конструктивному оформлению являются электрическими коллекторными машинами.
Выходной характеристикой тахогенератора является зависимость величины на-пряжения на зажимах якоря Uя от частоты его вращения n при постоянном магнитном потоке возбуждения Ф и постоянном сопротивлении нагрузки Rнагр
На рис. 7.8.1 показана выходная характеристика тахогенератора при различных Rнагр.
Тахогенераторы
Тахогенератором называется информационная электрическая машина, предназначенная для выработки электрических сигналов, пропорциональных частоте вращения ротора. Тахогенераторы могут быть постоянного и переменного тока. Тахогенераторы постоянного тока представляют собой маломощные генераторы постоянного тока с независимым возбуждением или с возбуждением от постоянных магнитов. Выходное напряжение тахогенератора пропорционально частоте вращения ротора.
Асинхронный тахогенератор по конструктивному исполнению подобен асинхронному двигателю с полым немагнитным ротором. Он состоит из статора и неподвижного сердечника ротора, между которыми, в воздушном зазоре вращается тонкий полый немагнитный цилиндр. Принципиальная схема асинхронного тахогенератора показана на рис. 13.4.
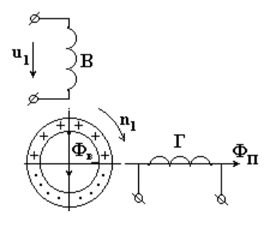
Рис. 13.4
На статоре генератора размещены две обмотки, пространственно смещенные относительно друг друга на 90o. Одна из них, обмотка возбуждения B, подключена к источнику синусоидального напряжения, другая обмотка, являющаяся генератором Г, включается на измерительный прибор или на измерительную схему.
Обмотка возбуждения создает пульсирующий магнитный поток Фв.
При неподвижном роторе ЭДС в генераторной обмотке равна нулю, так как вектор магнитного потока Фв перпендикулярен оси этой обмотки.
При вращении цилиндра пульсирующий магнитный поток индуктирует в нем ЭДС вращения. Под действием ЭДС в цилиндре появляются токи, направления которых указаны на рис. 13.4. Токи создают по оси генераторной обмотки пульсирующий поперечный поток Фп. Этот поток индуктирует в генераторной обмотке ЭДС, пропорциональную частоте вращения цилиндра.
Асинхронные тахогенераторы, как и тахогенераторы постоянного тока, используются для измерения скорости вращения валов, а также для вырабатывания ускоряющих или замедляющих сигналов в автоматических устройствах
Характеристика повреждения трансформаторов. Методы испытания трансформаторов
Силовые трансформаторы являются одним из наиболее массовых и значимых элементов энергосистем. Так, в 1999 г. только в ЕЭС России было в эксплуатации в сетях 110 - 750 кВ силовых трансформаторов и автотрансформаторов общей мощностью Sт.уст. = 567 569 МВ-А при установленной мощности генераторов Pг.уст.= 194 000 МВт. При этом коэффициент соотношения установленных мощностей трансформаторов и генераторов составил: Kт.г. = 2,92. При учете установленной мощности всех силовых трансформаторов, включая трансформаторы напряжением менее 110 кВ, Кт.г. существенно больше и достигает 6-6,5.
Естественно, что надежность работы сетей, электростанций и энергосистем в значительной степени зависит от надежности работы трансформаторов, тем более, что значительная часть трансформаторов отработала определенный стандартом минимальный срок службы - 25 лет [I], а техническое перевооружение трансформаторов в силу сложившихся условий идет крайне медленно: в 1993 г. оно составило 1,1%, а в 1999 г. - всего только 0,5%.
Для анализа надежности работы трансформаторов в первую очередь необходима представительная выборка эксплуатационных данных, а также следующая информация:
· распределение повреждений по основным узлам трансформаторов разных классов напряжений;
· характеристики тяжести повреждений;
· роль коротких замыканий;
· частота повреждений в зависимости от срока службы трансформаторов;
· причины и последствия повреждений;
· данные об отклонениях от требований нормативно-технических документов, инструкций заводов-изготовителей, противоаварийных и эксплуатационных циркуляров, руководящих и распорядительных документов РАО "ЕЭС России" [2].
За период с января 1997 по ноябрь 2000 г. было проанализировано в общей сложности по актам, поступившим в Департамент генеральной инспекции по эксплуатации электрических станций и сетей РАО "ЕЭС России", 712 отказов и технических нарушений силовых трансформаторов напряжением 35 - 750 кВ.
В табл. 1 приведено распределение повреждений силовых трансформаторов по узлам и классам напряжений, при этом их число составило: 29% для 35 кВ; 47% для 110 кВ; 19% для 220 кВ; 2% для 330 кВ; 3% для 500 кВ; 0% для 750 кВ.
Как следует из табл. 1, наибольшую повреждаемость имеют: высоковольтные вводы - 22%, обмотки - 16%, устройства РПН - 13,5%. Значительная доля отказов приходится на течи (11%) и упуск трансформаторного масла (23%).
Таблица 1
Распределение повреждений силовых трансформаторов по узлам и классам напряжений за период январь 1997 г. - ноябрь 2000 г.
| Узел | Класс напряжения, кВ | |||||||||||||
| 35 | 110 | 220 | 330 | 500 | 750 | Всего | ||||||||
| Число | % | Число | % | Число | % | Число | % | Число | % | Число | % | Число | % | |
| Обмотки | 61 | 30 | 43 | 13 | 10 | 7 | 1 | 8 | 0 | 0 | 0 | 0 | 115 | 16 |
| Магнитопровод | 0 | 0 | 0 | 0 | 2 | 1,5 | 1 | 8 | 0 | 0 | 0 | 0 | 3 | 0,5 |
| Система охлаждения | 7 | 3 | 16 | 5 | 8 | 6 | 2 | 15 | 3 | 14 | 0 | 0 | 36 | 5 |
| РПН | 4 | 2 | 61 | 18 | 26 | 19 | 1 | 8 | 5 | 24 | 0 | 0 | 97 | 13,5 |
| Вводы | 27 | 13 | 77 | 23 | 44 | 32 | 3 | 23 | 7 | 34 | 0 | 0 | 158 | 22 |
| Течь масла | 15 | 7 | 35 | 10 | 21 | 15 | 3 | 23 | 4 | 19 | 0 | 0 | 78 | 11 |
| Упуск масла | 59 | 30 | 75 | 22 | 24 | 18,5 | 2 | 15 | 2 | 9 | 0 | 0 | 162 | 23 |
| Вандализм | 31 | 15 | 31 | 9 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 63 | 9 |
| Итого | 204 | 100 | 338 | 100 | 136 | 100 | 13 | 100 | 21 | 100 | 0 | 0 | 712 | 100 |
В табл. 2 приведено распределение повреждений силовых трансформаторов по узлам, для которых в актах указана продолжительность их эксплуатации. Как видно из табл. 2, повреждения обмоток имеют место у трансформаторов с любыми сроками эксплуатации, для РПН наибольшее число повреждений у трансформаторов со сроками эксплуатации 10-30 лет, для высоковольтных вводов - после 10 лет эксплуатации. Однако имеющиеся данные не позволяют сделать оценку зависимости повреждаемости трансформаторов от срока эксплуатации, так как для этого необходимо учитывать число эксплуатируемых трансформаторов в каждом диапазоне времени службы.
Наиболее тяжелым повреждением трансформатора является внутреннее короткое замыкание (КЗ). Как показал анализ, повреждения, вызванные внутренними КЗ, имели место при повреждениях обмоток в 80% случаев общего числа повреждении обмоток, при повреждениях высоковольтных вводов - 89%, при повреждениях РПИ -25% и при повреждениях прочих узлов - 36% соответственно, включая ошибки при монтаже, ремонте и эксплуатации.
При обработке данных актов выявлен ряд случаев неправильного применения [3] в части требований к составлению актов расследования технологических нарушений в работе электростанций, сетей и энергосистем. Составители актов не всегда выполняют при их заполнении требования всех пунктов. Так, за период 1997-1998 гг. 23,4% актов были оформлены не полностью. В 2000 г. доля не полностью оформленных актов сократилась до 10,4%. В частности, в ряде случаев отсутствуют данные о недоотпуске, недовыработке энергии и экономическом ущербе от последствий отказа, как того требует [4].
Основные повреждения трансформаторов и высоковольтных вводов с указанием причин их возникновения, характером и последствиями их развития приведены в табл. 3.
Анализ повреждений трансформаторов с внутренними короткими замыканиями по периодам, указанным в [1] (первый - в течение первых 12 лет эксплуатации до первого капитального ремонта, второй - за полный нормированный срок службы не менее 25 лет, третий - за срок службы более 25 дет), представлен далее.
За период эксплуатации до 12 лет имели место следующие виды повреждений:
· внутренние повреждения трансформаторов из-за длительного неотключения при сквозных КЗ на стороне 10 кВ;
· повреждения обмоток высшего напряжения из-за возникновения виткового замыкания;
· повреждения негерметичных вводов, длительно хранившихся на складе до установки в трансформатор;
· перекрытия масляного канала герметичных вводов по внутренней поверхности нижней фарфоровой покрышки;
· нарушения целостности контактной системы и токоограничивающих сопротивлений контактора РПН, приведшие к образованию электрической дуги и выбросу масла.
За период 12-25 лет эксплуатации имели место следующие повреждения:
· повреждения обмоток низшего напряжения при резко переменных нагрузках дуговых электрических печей завода;
· повреждения из-за увлажнения и загрязнения изоляции обмоток;
· увлажнения бакелитовой изоляции контактора РПН;
· повреждения негерметичных вводов из-за увлажнения и загрязнения внутренней изоляции;
· перекрытие, масляного канала герметичных вводов по внутренней поверхности нижней фарфоровой покрышки.
Таблица 2
Распределение повреждений силовых трансформаторов по узлам с указанием продолжительности их эксплуатации за период январь 1997 г. - ноябрь 2000 г.
| Узел | Число повреждений по продолжительности эксплуатации | Всего | ||||
| 10 лет | 10-20 лет | 20-30 лет | 30-40 лет | более 40 лет | ||
| Обмотки | 23 | 25 | 23 | 28 | 12 | 111 |
| Магнитопровод | 6 | 0 | 1 | 0 | 0 | 1 |
| Система охлаждения | 2 | 14 | 13 | 1 | 0 | 30 |
| РПН | 12 | 28 | 21 | 10 | 0 | 71 |
| Вводы | 15 | 37 | 38 | 31 | 9 | 130 |
| Течь масла | 12 | 16 | 19 | 11 | 3 | 61 |
| Упуск масла | 12 | 22 | 22 | 14 | 5 | 75 |
| Вандализм | 3 | 6 | 10 | 1 | 1 | 21 |
| Итого | 79 | 148 | 147 | 96 | 30 | 500 |
Т а б л и ц а 3
Основные повреждения трансформаторов высоковольтных вводов
| Узел | Повреждение | Причина возникновения повреждения | Характер и последствия развития повреждения |
| Обмотка | Выгорание витковой изоляции и витков обмотки | Длительное неотключение сквозного тока КЗ на стороне низшего напряжения трансформатора | Выгорание витковой изоляции и витков, разложение масла, расплавление и разбрызгивание меди и разрушение изоляции |
| Деформации обмотки | Недостаточная электрическая стойкость обмоток | Повреждение изоляции вследствие деформации обмоток с возможным повреждением трансформатора | |
| Увлажнение и загрязнение изоляции обмоток | Нарушение герметичности трансформатора к токам КЗ |
Снижение электрической прочности маслобарьерной изоляции и пробой первого масляного канала, что может вызвать: - развитие "ползущего разряда" - ионизационный пробой витковой изоляции за счет вытеснения масла водяным паром из капилляров изоляции - повреждение трансформатора |
|
| Износ изоляции обмоток | Снижение механической стойкости изоляции обмоток | Разрушение изоляции обмоток с последующим возникновением виткового замыкания или замыкания на другую обмотку при умеренном сквозном токе КЗ с внутренним повреждением трансформатора | |
| Дефект изготовления грозоупорной обмотки | Касание петель грозоупорных обмотокразделяющей перегородки | В условиях вибрации трансформатора ведет к истиранию изоляции петель и развитию пробоя | |
| Магнитопровод | Перегрев магнитопровода | Образование короткозамкнутого контура в магнитопроводе | Оплавление стали магнитопровода, пожар в железе, разложение масла |
| Система охлаждения | Нарушение охлаждения трансформатора | Повреждение маслонасосов | Нарушение охлаждения трансформатора и загрязнение механическими примесями |
| Засорение труб охладителей | Перегрев трансформатора | ||
| Переключатели ответвлений РПН | Нарушение контактов в РПН | Искрение, перегрев, оплавление и выгорание контактов. Подгар токоограничивающих сопротивлений | Неработоспособность РПН |
| Нарушение перегородки, изолирующей бак расширителя МЧН от бака трансформатора | Дефект изготовления | Загрязнение масла трансформатора, снижение его электрической прочности, усложнение диагностики трансформатора | |
| Механическая неисправность ГОН | Износ элементов кинематической схемы | Обгорание контактов переключателей | |
| Нарушение герметичности бака контактора | Увлажнение бакелитового цилиндра контактора | Внутреннее дуговое КЗ по увлажненным расслоениям бакелитовой изоляции бака РПН | |
| Прочие узлы | Нарушение герметичности | Подсос воздуха через сальники задвижек. Нарушение герметичности гибкой оболочки расширителя, неисправность воздухоосушителя | Проникновение атмосферной влаги и воздуха, ослабление электрической прочности изоляции |
| Нарушение контактных соединений отводов, демпферов и др. | Дефект монтажа и наладки | Перегрев контактов, загрязнение контактов продуктами разложения изоляции и масла | |
| Течь масла через резиновые прокладки в месте соединений бака с выхлопной трубой, из-под разъема крепления ввода | Дефекты монтажа, ремонтам эксплуатации | Упуск масла из трансформатора | |
| Высоковольтные негерметичные вводы | Увлажнение и загрязнение изоляции негерметичных вводов | Проникновение атмосферной влаги во ввод, образование примесей в масле ввода | Создает условия для развития теплового и электрического пробоя изоляции ввода |
| Высоковольтные герметичные вводы | Отложение осадка (продуктов окисления масла или вымывания из конструктивных материалов) на внутренней поверхности фарфора и на поверхности внутренней изоляции | Осадок адсорбирует влагу и загрязнения, в том числе металлосодержащие | Приводит к возникновению проводящих дорожек, развитию разрядов и пробою масляного канала ввода |
| Коллоидное старение масла | В результате окислительных процессов и взаимодействия масла с конструктивными материалами, в первую очередь, с медесодержащими и железосодержащими, происходит образование и рост коллоидных частиц | Приводит к снижению электрической прочности масляного канала ввода | |
| Течь масла из вводов через нижние резиновые прокладки, из-за нарушения верхнего уплотняющего узла, через резиновые уплотнения измерительного вывода | Дефекты монтажа, ремонта и эксплуатации | Ведет к снижению давления масла, нарушению герметичности, попаданию влаги и воздуха во ввод. Вызывает снижение электрической прочности изоляции | |
| Повышение давления во вводах | Вызывается потерей герметичности сильфонов и, как следствие, недостаточной температурной компенсацией имеющегося объема масла, а также появлением источника интенсивного газообразования или нарушением связи между вводом и выносным баком давления | Снижение электрической прочности внутренней изоляции ввода |
За период после 25 лет эксплуатации имели место повреждения:
· внутренние повреждения трансформаторов из-за длительного их неотключения при сквозных КЗ на стороне 10 кВ;
· повреждения РПН и обмоток трансформаторов при переключениях РПН;
· повреждения трансформаторов из-за нарушения контактов отвода обмотки, обрыва части проводников гибкой связи от вводного изолятора к обмотке, отгорания отвода обмотки в баке трансформатора с замыканием на ярмовую балку;
· повреждения негерметичных вводов из-за увлажнения и загрязнения внутренней изоляции;
· износ изоляции обмоток.
Из зафиксированных случаев повреждений трансформаторов с внутренними короткими замыканиями 15% сопровождались взрывами и пожарами. Эти повреждения в основном были вызваны повреждениями РПН, обмоток и высоковольтных вводов.
Так, в частности, при перекрытии изоляции масляного канала герметичного ввода ГМТА-110 произошло повреждение автотрансформатора АТДЦТН-125000/220/110 1985г. изготовления. Трансформатор поврежден полностью и восстановлению не подлежит.
Из-за сильного износа изоляции обмоток произошло повреждение с пожаром трансформатора ОТД-60000/220/110 1958г. изготовления с полным разрушением трансформатора и вводов 220, 110 и 10 кВ.
В результате повреждения РПН автотрансформатора АОДЦТН-267000/500/220 1973 г. изготовления и последующего пожара произошли: разрыв бака, разрушение фарфоровых покрышек вводов 220 кВ, корпуса контактора устройства РПН, отгорание спуска гибкой связи 220 кВ от воздействия пламени пожара, повреждение оборудования шкафов обдува (ШАОТ) и кабельных связей системы охлаждения, а также трех охладителей.
Проведенный анализ показал, что внутренние КЗ в трансформаторах 110-500кВ связаны, в первую очередь, с повреждениями РПН, высоковольтных вводов и обмоток. При этом наиболее тяжелые последствия имеют место при развитии таких дефектов, как:
· снижение электрической прочности масляного канала высоковольтных герметичных вводов из-за отложения осадка на внутренней поверхности фарфора и на поверхности внутренней изоляции, а также из-за коллоидного старения масла;
· снижение электрической прочности бумажно-масляной изоляции высоковольтных негерметичных вводов из-за увлажнения и загрязнения;
· увлажнение, загрязнение и износ изоляции обмоток трансформаторов;
· выгорание витковой изоляции и витков обмоток из-за длительного неотключения сквозного тока КЗ на стороне низшего напряжения трансформатора;
· ошибки монтажа, ремонта и эксплуатации.
Необходимо отметить, что большая часть указанных дефектов могла бы быть своевременно выявлена применением существующих методов и средств технической диагностики.
С выходом шестого издания [5] для силовых трансформаторов, автотрансформаторов и масляных реакторов существенно расширен перечень контролируемых параметров. При этом принципиальное отличие действующего документа [5] от предыдущего [6] заключается в том, что наряду с традиционными испытаниями, лежащими в основе оценки состояния трансформаторов, где контролируемые параметры в своей основе имеют связь с электрической прочностью изоляции, введены новые, не имеющие непосредственной связи, но нацеленные на раннее обнаружение развития дефектов. К ним относятся: хроматографический анализ газов, растворенных в масле; контроль содержания фурановых соединений в масле; измерение степени полимеризации; тепловизионный контроль; измерение сопротивления короткого замыкания. Также появляются предложения по дальнейшему расширению данного перечня, в частности: контроль уровня частичных разрядов; ИК-спектрометрический анализ; контроль мутности и поверхностного натяжения масла; вибрационный контроль состояния прессовки обмотки и др.
Таблица 4
Вид диагностической ценности методов контроля
| Метод контроля | Анализируемый процесс | Вид диагностической ценности |
| Хроматографический анализ газов, растворенных в масле | Перегрев токоведущих соединений и элементов конструкции внутренней изоляции, электрический разряд в масле | Сопутствующий показатель физико-химического разрушения изоляции. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
| Измерение степени полимеризации бумажной изоляции | Износ бумажной изоляции | Функция физико-химического разрушения изоляции. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
| Измерение содержания фурановых соединений в масле | Старение бумажной изоляции | Сопутствующий показатель физико-химического разрушения изоляции. Отсутствие монотонности и значимых различий изменения содержания от срока эксплуатации и степени износа изоляции. Случайная диагностическая ценность |
| Измерение мутности масла | Коллоидно-дисперсные процессы в высоковольтных герметичных вводах | Функция физико-химического состояния коллоидно-дисперсной системы. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
| Измерение поверхностного натяжения | Старение масла | Функция полярности жидкости. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
| ИК-спектрометрия | Старение масла | Сопутствующий показатель наличия продуктов старения масла. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
| Тепловизионный контроль | Локальные зоны перегрева | Сопутствующий показатель теплового состояния трансформатора и токоведущих частей. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
| Измерение частичных разрядов | Ионизационные процессы в изоляции | Сопутствующий показатель физико-химического разрушения изоляции. Отсутствие монотонности изменения во времени при развитии процесса. Случайная диагностическая ценность |
| Измерение сопротивления короткого замыкания | Деформация обмоток | Сопутствующий показатель изменения геометрии обмоток Монотонность изменения во времени при развитии процесса Детерминированная диагностическая ценность |
| Метод низковольтных импульсов | Деформация обмоток | Сопутствующий показатель изменения геометрии обмоток Монотонность изменения во времени при развитии процесса Детерминированная диагностическая ценность |
| Определение усилий прессовки обмоток трансформатора по частоте собственных колебаний системы прессовки при внешнем импульсном механическом воздействии | Распрессовка обмоток | Сопутствующий показатель степени прессовки обмоток. Монотонность изменения во времени при развитии процесса. Детерминированная диагностическая ценность |
Один из наиболее объективных показателей, позволяющих оценить информативность используемого признака, - диагностическая ценность. При наличии статистических данных йот показатель представляет собой численную оценку информации о состоянии оборудования, которой обладает интервал значений измеряемого параметра.
Следует отметить, что при анализе диагностической ценности того или иного признака принципиально важное значение имеют следующие аспекты:
· является ли контролируемый показатель функцией физико-химического состояния изоляции или он отслеживает сопутствующие изменения при развитии процессов, приводящих к повреждениям;
· наличие монотонности изменения значения измеряемого показателя во времени при развитии характеризуемого им процесса;
· наличие значимых различий между значениями измеряемого показателя и степенью развития процесса.
Выполнение или невыполнение этих условий определяет вид диагностической ценности (наличие детерминированной или случайной, диагностической ценности) у используемых признаков.
В табл. 4 приведена оценка вида диагностической ценности методов контроля процессов, приводящих к повреждениям трансформатора. Необходимо подчеркнуть, что признаки со случайной диагностической ценностью, определяемой отсутствием монотонности изменения значений при развитии контролируемого им процесса, не могут быть использованы для принятия решений о состоянии оборудования, а лишь в некоторых случаях могут свидетельствовать о необходимости более полного обследования.
Дополнительно необходимо отметить, что в настоящее время в эксплуатации еще находится довольно много трансформаторов, изготовленных в соответствии с [7], имеющих недостаточную электродинамическую стойкость к возросшим уровням токов короткого замыкания в энергосистемах. Согласно [1] расчетная мощность трехфазного короткого замыкания в сетях 6 - 750 кВ примерно в 2,5 раза больше принятой в [I]. Повреждаемость трансформаторов, разработанных до 1970 г., согласно [8] превышает 1%, в то время как у новых она около 0,2% (без учета повреждений из-за высоковольтных вводов). Для трансформаторов, изготовленных в соответствии с [I], имеет место повышенный риск их повреждений. Риск в этом случае представляет собой материальные и социальные потери от коротких замыканий.
Объективное наличие фактора риска в условиях эксплуатации требует применения целенаправленных мероприятий, позволяющих снизить риск как в части вероятности повреждения трансформатора, так и в части возможных убытков. К первой части следует отнести используемые в практике координации уровней токов короткого замыкания различные мероприятия по ограничению сквозных токов короткого замыкания автотрансформаторов энергосистем при достижении токами значений 80% и более нормированного уровня [9, 10]. Это изменение схемы сети (схемные решения), обеспечивающее снижение токов короткого замыкания; стационарное и автоматическое деление сети; введение реакторов в нейтраль трансформаторов и автотрансформаторов; ограничение опасных воздействий токов короткого замыкания на обмотки автотрансформаторов путем выбора очередности АПВ линий и даже блокировки АПВ; применение методов и средств диагностики.
Требуется повышенное внимание к мероприятиям, оказывающим прямое влияние на снижение возможных убытков в случае возникновения аварийной ситуации: действия персонала в соответствии с нормативными инструкциями, эффективность работы автоматической системы пожаротушения, четкая работа релейной защиты и наличие необходимого резерва электрооборудования.
Выводы
1. Внутренние короткие замыкания в трансформаторе обусловлены чаще всего повреждениями РПН, высоковольтных вводов и обмоток. Эти повреждения сами по себе являются наиболее частыми.
2. Целесообразно внесение дополнений и изменений в РД 34.45-51.300-97 "Объем и нормы испытаний электрооборудования" в части оценки состояния бумажной изоляции обмоток на основе анализа диагностической ценности нормируемых показателей для трансформаторов, отработавших определенный стандартами минимальный нормированный срок службы 25 лет.
3. Целесообразно разработать методические указания по повышению надежности герметичных вводов в эксплуатации для продления срока службы трансформаторов.
4. Для трансформаторов, у которых возможны превышения допустимых для них значений токов короткого замыкания, имеет место повышенный уровень риска их повреждений, который следует учитывать в эксплуатации. Важной составной частью мероприятий при оценке технического состояния таких трансформаторов является выявление наличия опасных деформаций обмоток, потери механической прочности витковой изоляции и распрессовки обмоток.
5. Необходимо повысить требования к электротехнической промышленности в части повышения надежности работы РПН, вводов и обмоток (конструкция и изоляция).
Схемы электрооборудования обслуживаемого участка (цеха, отдела)
Защита от вредных веществ в промышленности: Вентиляция. Назначение, виды
Вентиляцией называется совокупность мероприятий и устройств, используемых при организации воздухообмена для обеспечения заданного состояния воздушной среды в помещениях и на рабочих местах в соответствии со СНиП. (Строительными нормами).
Системы вентиляции обеспечивают поддержание допустимых метеорологических параметров в помещениях различного назначения.
Различают следующие виды вентиляционных систем:
1. Естественная вентиляция (Перемещение воздуха в системах естественной вентиляции происходит вследствие разности температур, давлений наружного воздуха и воздуха в помещении).
2. Механическая вентиляция (В механических системах вентиляции используются оборудование и приборы, позволяющие перемещать воздух на значительные расстояния).
3. Приточная вентиляция (Приточные системы служат для подачи в вентилируемые помещения чистого воздуха взамен удалённого).
4. Вытяжная вентиляция (Вытяжная вентиляция удаляет из помещения загрязненный или нагретый отработанный воздух). И т. д.
Вентиляционные системы, как правило, состоят из определенного набора компонентов:
1. Воздухозаборная решётка (через неё поступает воздух в систему)
2. Воздушный клапан (предотвращает попадания в помещение наружного воздуха при выключенной вентиляционной системе).
3. Фильтр (фильтрует поступающий воздух от механических загрязнений).
4. Калорифер или воздухонагреватель (подогревает воздух, поступающий в систему вентиляции в зимний период).
5. Шумоглушитель (предотвращает распространение шума по воздуховодам).
6. Вентилятор (подаёт или выбрасывает воздух из системы).
7. Воздуховоды (распределяют воздушные потоки по помещению).
8. Воздухораспределители (решетки или диффузоры: через них осуществляется подача (забор) воздуха из помещения).
9. Автоматика (управление элементами вентиляционной системы).
На сегодняшний день наиболее распространённым вентиляционным оборудованием является вентиляционное оборудование фирм Ostberg (Швеция), Systemair (Швеция).