
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Тахометрические датчики
Курсовая работа: Тахометрические датчики
курсовыФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ РОССИЙСКОЙ ФЕДЕРАЦИИ
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра радиоэлектронных технологий и экологического мониторинга
(РЭТЭМ)
Тахометрические датчики
Курсовая работа по дисциплине «Приборы и датчики»
студент гр.213
_________Скакун Н.М.
22.12.2005
Руководитель
_________Бакин Н.Н.
____________оценка
2005
Содержание
1. Введение………………………………………………………………………………3
2. Электромагнитные тахометры угловой скорости………………………………….5
2.1 Тахометрический генератор постоянного тока……………………………………5
2.2 Тахометрические генераторы на переменном токе………………………………10
2.3 Электромагнитные тахометры линейной скорости……………………………....13
2.4 Импульсные тахометры угловой скорости………………………………………..14
2.5 Датчики с переменным магнитным сопротивлением…………………………….15
2.6 Датчики на токах Фуко……………………………………………………………..17
2.7 Оптический тахометр……………………………………………………………….17
3. Гирометры…………………………………………………………………………….18
3.1 Гироскопический измеритель скорости…………………………………………...19
3.2 Оптические тахометры ………………………………………………………….….20
4. Заключение……………………………………………………………………………21
5. Приложение…………………………………………………………………………...22
6. Список используемой тературы……………………………………………………..25
Введение
В промышленности измерение скорости сводится в большинстве случаев к измерению скоростей вращения крутящихся деталей и узлов, когда за ними приходится наблюдать в целях безопасности либо для создания условий их работы в желательном режиме. В случае прямолинейного движения измерение скорости часто также может быть сведено к измерению скорости вращения. Поэтому тахометрические датчики являются в своем большинстве датчиками угловой скорости.
|
|
|
|
Промышленные датчики, предназначенные специально для измерения скорости, базируются на законе Фарадея
где х — переменная линейного или углового положения. Поэтому всякое относительное перемещение между источником потока (индуктором) и контуром наводит в этом последнем э. д. с, амплитуда которой пропорциональна скорости перемещения, вследствие чего на выходе такого датчика формируется сигнал
![]()
Этот вид тахометрии называется электродинамическим.
Когда исследуемое
движущееся тело осуществляет периодическое движение, например вращение,
определение его скорости может быть заменено измерением частоты: так, датчик
близости, расположенный рядом с объектом, расстояние до которого изменяется
периодически, выдает сигнал, частота которого равна или кратна, в зависимости
от конфигурации объекта, частоте движений. Так, для измерения угловой скорости
вращающегося вала можно использовать насаженный на него диск, снабженный
чередующимися прозрачными и непрозрачными частями, которые при вращении будут
прерывать поток лучей, регистрируемый с помощью оптического детектора. Таким
образом будет формироваться последовательность электрических импульсов с
частотой, пропорциональной скорости. ![]()
Тахометры этого типа называют импульсными.
В случае очень медленного вращения, например, менее одного градуса в час, описанные выше методы становятся непригодными, и в этом случае измерение скорости может быть j эффективно осуществлено с помощью лазерного гигрометра.
Принцип его действия основан на существовании разности i хода двух волн, излучаемых одним лазером и распространяющихся в противоположных направлениях в одной и той же вращающейся среде. Эта разность хода, пропорциональная угловой скорости, выявляется с помощью интерферометра.
Отношения, которые связывают скорость и положение, с одной стороны, и скорость и ускорение, с другой, позволяют определять скорость путем обработки сигналов датчиков каждой из этих двух величин.
Производная по времени сигнала аналогового датчика положения определяет величину скорости. Однако этот метод связан с появлением помех (например, из-за дискретности проволочного потенциометра) и увеличением высокочастотного шума.
Интегрирование сигнала датчика ускорения представляет другой метод определения скорости; используемый в навигации, он требует сложного оборудования (инерциальная платформа).
Электромагнитные тахометры угловой скорости
Тахометрический генератор постоянного тока
Устройство. Принцип действия. Элементами устройства генератора являются
а) статор (индуктор), представляющий собой ферромагнитный каркас, который несет 2 полюса, направляющих поле магнитной индукции, образуемое током через катушки (электромагниты) или постоянными магнитами;
б) ротор (якорь), который представляет собой многослойный цилиндр из листового железа, вращающийся между полюсами статора, причем его ось совпадает с осью статора; на его периферии параллельно оси расположены в углублениях (пазах) л=2 медных проводников; эти проводники, называемые активными, соединены попарно своими концами с другими, которые расположены строго вдоль диаметра ротора к называются пассивными;
в) коллектор — цилиндр с той же осью, что к у ротора, но значительно меньшего диаметра, несущий изолированные между собой медные пластинки, каждая из которых связана с активным проводником;
г) две щетки, связанные с клеммами генератора и прижимаемые к коллектору, которые закрепляются на двух Диаметрально противоположных пластинках; щетки расположены вдоль средней линии перпендикулярно направлению индукции, так, чтобы снимать максимальную э.д.с.
Расчет э.д.с, наводимой в активных проводниках. В /-м проводнике (0^/<2fe-l) вследствие вращения возникает э.д.с, величина которой определяется выражением
![]()
где dtp/ —магнитный поток, пересекаемый проводником за интервал времени dt,
![]()
dsc — приращение площади поверхности, описываемой движущимся проводником, за время dt, и BIN - составляющая В,
нормальная к dsc.
Приращение площади описываемой поверхности определяется выражением
![]()
Здесь / — длина активного проводника, a v — его линейная скорость, равная t)=wr, где to —угловая скорость ротора, г —его радиус. Окончательно получаем
![]()
В диаметрально противоположном активном проводнике вследствие симметрии имеем
![]()
Расчет э. д, с. совокупности проводников, расположенных одну сторону от нейтральной линии. В совокупности k проводников справа от нейтральной линии наводится суммарная
![]()
где s=2nrt/n — площадь поверхности между двумя соседними проводниками, и 2J sB/*—Фо— поток, исходящий из полюса индуктора.
Для этих условий можно написать
![]()
где N — частота вращения ротора (число оборотов в секунду); таким же образом в совокупности проводников слева от нейтральной линии наводится э.д.с. Eg:
![]()
Идея намотки состоит в соединении между собой 2k проводников так, чтобы образовать два одинаковых комплекта по k последовательно соединенных проводников, в каждом из которых возникает э. д. с. Е, такая, что
![]()
Эта э.д.с. поступает во внешнюю цепь через две щетки, расположенные на коллекторе вдоль нейтральной линии диаметрально противоположно друг другу.
В более общем случае, когда генератор имеет 2/7 полюсов индукторов (каждый с потоком Фо), п\проводников ротора, соединенных параллельно по 2о ветвям обмотки, индуцируемая э.д.с. имеет величину
![]()
Именно на этой пропорциональности э.д.с. Е и угловой скорости а основано использование генераторов постоянного тока в тахометрии, и одно из их преимуществ по сравнению с другими тахометрическими датчиками состоит в том, что получаемый сигнал изменяет знак одновременно с изменением направления вращения.
Реакция якоря. Если якорь связан с внешним контуром, то э.д.с. вызывает в нем ток , проходящий через активные проводники по разные стороны от нейтральной линии в противоположных направлениях.
Сопоставляя попарно проводники, симметричные относительно нейтральной линии, устанавливаем, что они создают индукцию, перпендикулярную линии полюсов и пропорциональную I; эта поперечная индукция называется реакцией якоря.
Реакция якоря вызывает искривление силовых линий поля к приводит к смещению нейтральной линии в направлении движения. Поскольку э.д.с. снимается с неподвижных щеток, установленных на первоначально нейтральной линии (/=0), ее величина ускоренно убывает с ростом тока .
Эксплуатационные
параметры. На холостом ходу (/=0) э. д. с. генератора определяется общим
выражением![]()
где фо — поток, вызванный индукцией, ke и km — постоянные параметры генератора.
|
|
Когда генератор соединен с нагрузкой R, он отдает ток /, который вызывает внутреннее падение напряжения RJf где Ri — сопротивление якоря, и реакцию якоря, которая уменьшает э.д.с. генератора тем больше, чем больше величина тока. Обозначая k, величину, характеризующую реакцию якоря, можно написать
| Падение напряжения на щетках описывается выражением |
|
|
или
где еь и Rb зависят от материалов контактов щетка — коллектор.
|
|
Для совокупности генератора с нагрузкой получаем соотношение
или![]()
откуда следуют выражения для тока в нагрузке
|
|
| и для напряжения на клеммах нагрузки |
Из полученного для V выражения можно заключить, что:
—генератор имеет «мертвую зону», а напряжение возникает только при скоростях выше еь1ке\ щетки должны быть установлены таким образом, чтобы минимизировать контактную разность потенциалов eyt напряжение U не является строго линейной функцией от вследствие реакции якоря; при тахометрическом использовании в режиме генератора нелинейность может быть уменьшена путем: а) минимизации тока / за счет использования повышенного сопротивления нагрузки; б) ограничения скорости вращения; в) использования таких типов обмотки ротора, которые дают малую реакцию якоря. Напряжение, получаемое в режиме генератора, обычно характеризуют величиной э.д.с. при скорости вращения 1000 об/ мин и обозначают через Ке.
Линейность характеристики тахометра оценивают с использованием максимальной разницы при 3600 об/мин между напряжением, измеренным на холостом ходу UM, и напряжением Uс, вычисленным в предположении линейности генератора, т.е. £/с=3,6 Ке- Полагают, следовательно, что
![]()
Реакция якоря зависит от направления вращения, поскольку она приводит к смещению нейтральной линии в направлении вращения; для равных, но противоположно направленных скоростей вращения потоки, действующие на ротор, не одинаковы и, таким образом, соответствующие э.д.с. не точно симметричны.
Пусть Ке и Ке—э.д.с. холостого хода при 1000
об/мин для каждого направления вращения; асимметрия кривой £/=/(о>)
при этом характеризуется двусторонним допуском![]()
Напряжение
U, вырабатываемое генератором, не
является строго постоянным; оно содержит переменные составляющие, обусловленные
а) возможным эксцентриситетом ротора и неоднородностью его магнитных свойств,
что приводит к пульсациям с частотой ш/2л; б) явлениями, связанными с
коммутацией пластин коллектора и вызывающими биение частоты лс<о/2я,
где Uс — число пластин. Такие пульсации
можно в принципе ослабить с помощью фильтров LC или RC,
хотя на малых скоростях вращения может возникнуть проблема с составляющей и.
Степень модуляции напряжения на выходе генератора вследствие биения
характеризуется величиной В для данной скорости вращения: ![]()
где Аи — размах колебаний напряжения U.
Типы конструкций. Чтобы избежать использования дополнительного источника питания обмотки возбуждения, индуктор выполняют на постоянных магнитах. Укажем обычно используемые материалы и порядок величин их остаточной индукции Вг и коэрцитивного поля Не. Твердые ферриты из смеси металлических оксидов: Вг— =0,2-5-0,4 Тл; Яс= ЮО-г-250 кА/м; альнико (сплав железо — никель — кобальт — алюминий — медь): £,=0,8-М,3 Тл; с=504-80 кА/м; тиконал (сплав типа альнико с добавкой титана): Br=0,7-f--т-0,8 Тл; #с=120-г160 кА/м; кобальт—самарий (редкоземельный элемент): Вг=0,8-г-4-1,0 Тл; Яс=600н-700 кА/м. В противоположность альнико и тиконалу магниты из ферритов или редкоземельных металлов не размагничиваются при демонтаже; зато альнико и тиконал малочувствительны к температурам. Классификация в порядке возрастания цены следующая: феррит, альнико, тиконал, редкие земли.
Роторы бывают трех видов — катушечные, колоколообразные, дискоидальные.
Генератор с катушечным ротором позволяет вырабатывать относительно большое напряжение в несколько десятков вольт. Однако реакция якоря может искажать линейность, а значительная индуктивность обмотки L ухудшает электрическое быстродействие, определяемое постоянной времени L/R; значительной является и механическая инерция. Колоколообразный ротор образуется проволочной обмоткой на пустотельном немагнитном цилиндре, вращающемся вокруг фиксированного сердечника. Такой тип конструкции обеспечивает значительное снижение реакции ротора, индуктивности L и механической инерции. Дискоидальный ротор представляет собой изолированный диск, на котором закреплены пластинчатые проводники; этот тип конструкции характеризуется, в частности, очень малой величиной индуктивного сопротивления, хорошей защищенностью от посторонних воздействий и допускает относительно большие токи без искажения линейности.
Тахометрические генераторы на переменном токе
Такой тип генераторов интересен отсутствием коллектора и щеток, что способствует заметному увеличению срока службы, а также отсутствию флуктуации падения напряжения на щетках и подавлению паразитных сигналов при коммутациях. Однако схемы включения таких генераторов обычно более сложны, так как измерение амплитуды требует выпрямления и фильтрации выходного напряжения.
Синхронный генератор. Речь идет о небольшом генераторе переменного тока. Ротор, связанный с осью, скорость которой Статор несет якорную обмотку (одно- или многофазную), в которой возникает синусоидальная э.д.с; ев амплитуда и частота пропорциональны скорости вращения ротора, т. е.
![]()
где £=&iO), Q—k2<i), k\, Аг —константы генератора. Таким об-; разом, величина w может быть определена по амплитуде э.д.с,' или по ее частоте.
Примерами таких тахометров могут служить генераторы с магнето (фирма-изготовитель Chauvin — Arnoux), имеющие однофазный статор и ротор в виде постоянного магнита с тремяпарами полюсов. Тахометр типа 64 имеет максимальную скорость 3000 об/мин, напряжение 24В±1% и частоту 50 Гц при1000 об/мин. У тахометра типа 64GV максимальная скорость составляет 6000 об/мин, напряжение 24В±1%, частота 200 Гц при 4000 об/мин.
Определение скорости по величине э.д.с. Импеданс якоря определяется выражением Zi=Ri+jLiQ, где Ri и U — соответственно его сопротивление и индуктивность.
Напряжение на клеммах ротора, нагруженного сопротивлением R, по абсолютной величине равно I
![]()
Как видно, напряжение U в общем случае не является линейной функцией. Использование генератора в тахометрии требует, чтобы сопротивление нагрузки R оставалось много больше импеданса обмотки даже при максимальных скоростях u; при этом U практически равно Е.
Выходное напряжение выпрямляется и фильтруется для получения постоянного пропорционального напряжения; оно не зависит от направления вращения. Эффективность фильтра падает с уменьшением частоты, поэтому степень биения напряжения возрастает при малых скоростях вращения, определяя нижний предел применимости. Кроме того, наличие фильтра вносит постоянную времени, которая снижает быстродействие.
Определение скорости по частоте сигнала. Частотное измерение представляет интерес, когда создаваемый синхронным генератором сигнал необходимо передать на расстояние; в этом случае потери в линии не влияют на измерение.
В качестве примера опишем тахометр с электрической передачей, выпускаемый фирмой Jaeger. Его задающий генератор — трехфазный, причем каждая обмотка его ротора соединена с одной из обмоток синхронного мотора. Поэтому в моторе возникает поле, которое вращается с той же скоростью, что ротор генератора, и увлекает синхронно ротор мотора, представляющий собой магнит. Ротор мотора связан со вторым магнитом (измерительным), который вращается перед металлическим диском; в последнем возникают токи Фуко, пропорциональные скорости вращения измерительного магнита, и вращающий момент Cm, пропорциональный скорости. Этот вращающий момент, согласно закону Ленца, стремится повернуть диск в сторону движения измерительного магнита; он уравновешивается противоположной парой сил спиральной пружины, так что отклонение а диска пропорционально скорости вращения.
Тахометрический асинхронный генератор. Его конструкция подобна конструкции двухфазного асинхронного мотора
|
|

Ротор состоит из тонкого немагнитного цилиндра, который вращается со скоростью (являющейся объектом измерения; его масса и инерция очень малы. Статор из магнитного листового железа несет две расположенные квадрупольно обмотки: а) возбуждающую обмотку, к которой приложено напряжение ve с амплитудой Ve и стабильной частотой). б)измерительную обмотку, в которой наводится э.д.с. Последняя Фоомипует- тахиметрический сигнал £ — постоянная данного прибора.
Разность фаз <р меняется на несколько градусов во всем диапазоне изменения скоростей генератора, но испытывает скачок на я при смене направления вращения. При нулевой скорости на клеммах измерительной обмотки возникает небольшое остаточное напряжение; оно вызвано несовершенством конструкции — асимметрией ротора, неоднородностью магнитного контура, неточной установкой обмоток по углу.
Порядок величин метрологических параметров прибора следующий: диапазон измерений от 10 об/мин до 2-10* об/мин; измеряемое напряжение при 1000 об/мин —от 1 до 10 В; отклонение от линейности — от 0,1% до 0,2% диапазона измерений; остаточное напряжение — от 10 до 100 мВ; момент инерции ротора— несколько г-см2. За исключением очень малого момента инерции, характеристики генераторов этого типа не слишком примечательны; кроме того, их использование требует очень стабильного возбуждающего источника. Однако такие генераторы представляют интерес, поскольку легко могут быть включены в регулирующие или командные комплексы, в которых информация передается амплитудой синусоидальных токов фиксированной частоты, содержащие, к примеру, такие приборы, как двухфазный мотор с управляющей обмоткой, синхродетек-гор, резольвер, индуктивный потенциометр.
Электромагнитные тахометры линейной скорости
Когда перемещение изучаемой детали значительно (свыше иетра), ее линейную скорость можно определить путем измерения угловой скорости, например, с помощью ролика либо иной вращающейся детали, являющейся частью того же устройства, скорость вращения которой пропорциональна линейной скорости перемещения; так, скорость стального листа на выходе прокатного стана определяется скоростью вращения валков.
В случае малых перемещений датчик скорости изготавливается из магнита и катушки. Поскольку один из этих элементов фиксирован, а другой связан с движущейся деталью, их относительное перемещение наводит в катушке э.д.с, пропорциональную скорости. Когда подвижна катушка, она перемещается в радиальном поле индукции тороидального возникающая в ней э.д.с. описывается выражением
![]()
где г и л — соответственно радиус витков и их число, f—2ягп— длина проволоки катушки, В — величина индукции, v — скорость перемещения.
Максимальное перемещение для таких конструкций составляет несколько миллиметров, чувствительность — порядка одного вольта на метр и секунду, а отклонение от линейности — около ±10%.
Для перемещений более значительных (достигающих 0,5 м) используют магнит, укрепленный на движущейся детали, который перемещается вдоль оси тандема из двух катушек.
Э.д.с, наведенная в катушке перемещением магнита, пропорциональна его скорости; э.д.с. катушек имеют противоположный знак, поскольку в них перемещаются противоположные полюса; поэтому обе катушки соединены последовательно и встречно по знаку, так что в этом случае получается ненулевая суммарная э.д.с.
Примером такого измерительного прибора может служить датчик линейной скорости 7L20VT.Z (фирма-изготовитель Schaevitz), имеющий максимальный ход 500 мм, чувствительность 4,8 мВ/мм/с и линейность ±1% от выходного напряжения.
Импульсные тахометры угловой скорости
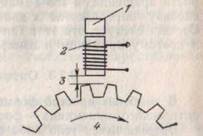
Часто приходится измерять скорость вращения диска на валу. Поверхность такого диска состоит из р равных секторов, каждый из которых имеет характерную отметку (отверстие,, щель, зуб). В качестве образца можно использовать любое вращающееся тело с периодической структурой: шестерню, ось с выемками, колесо с лопатками и т. д.
Соответствующий (например, оптический) датчик, помещенный напротив образца, обнаруживает прохождение отметок и каждый раз выдает импульсный сигнал. Частота импульсов датчика имеет величину /:
![]()
где N — число оборотов образца в секунду, р— число регулярных меток, на него нанесенных. Выбор подходящего датчика связан с природой вращающегося тела и нанесенных на него меток; в зависимости от обстоятельств используют или один из различных датчиков близости или оптический датчик. Датчик изменяющегося магнитного сопротивления должен быть размещен вблизи вращающегося ферромагнитного тела, метки на котором представляют собой резкие изменения его магнитных свойств. Датчик на токах Фуко и индуктивный датчик чувствительны к изменениям расстояния до проводящего тела вращения. Для датчиков, основанных на использовании эффекта Холла или магнитного сопротивления, требуется, чтобы на вращающемся теле находились в движении один или несколько магнитов и обеспечивалось периодическое экранирование датчика от магнитного поля. Оптический датчик и источник света позволяют регистрировать последовательность меток, образуемых разрывами оптических свойств вследствие наличия отверстий, щелей, отражающих поверхностей. Достоинства импульсной тахометрии обусловлены, с одной стороны, ее простотой, надежностью, совместимостью с агрессивной средой (например, измерения при ядерном облучении) м, с другой стороны, тем фактом, что носителем информации является частота, что обеспечивает определенную защищенность от различного рода помех (шумов, паразитных сигналов, ослабления в линиях связи) и упрощает преобразование в цифровую форму. Устройством формирования сигнала служит либо цифровой частотомер, либо преобразователь частота — напряжение; последний состоит из а) каскада согласования импедансов и формирования сигналов, например триггера Шмитта; б) односта-Зильной схемы, которая каждый импульс, поступивший с выхода предыдущей ступени, преобразует в импульс постоянной амплитуды и постоянной длительности Го (очевидно, величина То должна быть меньше минимального периода повторений); в) низкочастотного фильтра, выходное напряжение которого дает постоянную составляющую сигнала, равную среднему значению напряжения импульсов, сформированных одностабильной схемой, и пропорциональную То. Снижение граничной частоты фильтра уменьшает пульсации на выходе, но увеличивает постоянную времени и, следовательно, время измерения.
Датчики с переменным магнитным сопротивлением
Измерительная катушка снабжается магнитным сердечником, на который воздействует поток индукции постоянного магнита; катушка помещена перед диском (полюсное колесо) или перед вращающимся ферромагнитным телом. Последовательность скачков магнитных свойств (зубья, щели, отверстия) диска или вращающегося тела вызывает периодическое изменение
Магнитного сопротивления в магнитной цепи катушки, которое наводит в ней э.д.с. с частотой, пропорциональной скорости вращения. Амплитуда этой э.д.с. зависит:
а) от расстояния между катушкой и вращающимся телом; она быстро падает с увеличением этого расстояния ров); (которое обычно не ожет превышать нескольких миллимет
б) от скорости вращения (в принципе амплитуда э.д.с. пропорциональна этой скорости); при малых скоростях амплитуда может быть недостаточной для обнаружения, вследствие чего появляется «мертвая зона», в которой невозможны никакие измерения. Эта зона тем протяженнее, чем больше расстояние между катушкой и вращающимся телом. Увеличение потерь с повышением скорости ведет к ограничению амплитуды.
Диапазон измерений зависит от числа р скачкообразных изменений магнитных свойств вращающегося тела, например, от числа зубьев колеса.
Минимальная измеряемая скорость тем меньше, чем больше р, тогда как максимальная измеряемая скорость тем выше, чем меньше р. Типичные диапазоны измерении составляют от 50 до 500 об/мин для колеса с 60 зубьями и от 500 до 10 000 об/ мин для колеса с 15 зубьями.
Датчик рассматриваемого типа позволяет определять скорость диска, вращающегося внутри кожуха, при условии, стенка кожуха немагнитная и расстояние между катушкой и. диском остается небольшим.
Датчики на токах Фуко
Этот тип датчиков применим, когда вращающееся тело металлическое, но не ферромагнитное. Катушка, представляющая собой чувствительный элемент, образует индуктивность резонансного контура синусоидального генератора. При приближении металлического проводника изменяются характеристики L и R катушки, вследствие чего генерация прекращается. При прохождении каждого зуба вращающейся шестерни перед катушкой происходит прерывание колебаний, что обнаруживается, например, по изменению тока питания генератора. Частота соответствующего сигнала пропорциональна скорости вращения, а его амплитуда не зависит от последней, поскольку определяется в данном случае не законом Фарадея. Отсюда следует, что этот тип датчика не имеет «мертвой зоны» и поэтому применим к измерению очень малых скоростей.
Оптический тахометр
В наиболее простой форме он состоит из источника света и. оптического приемника — фотодиода или фототранзистора.
Вращающееся тело либо снабжают отражающими метками расположенными регулярно по окружности, на которые направляется световой пучок, либо соединяют с диском, имеющим попеременно прозрачные и непрозрачные сектора, который располагают между источником и приемником света. Получая модулированный скачкообразными изменениями отражения или пропускания поток, фотоприемник выдает электрический сигнал с частотой, пропорциональной скорости вращения, и с амплитудой, не зависящей от этой скорости. Диапазон измеряемых скоростей зависит, с одной стороны, от числа скачков оптических свойств (риски, щели, прозрачные сектора, нанесенные на диск или на вращающееся тело), а с другой — от полосы пропускания приемника и связанных с ним электрических схем. Для измерений малых скоростей, например ОД об/мин, используются диски с большим числом щелей (от 500 до нескольких тысяч); в измерениях больших скоростей, например 105-т--т-106 об/мин в случае ультрацентрифуг, диск имеет только одну щель, и максимальная измеряемая скорость определяется верхней граничной частотой электрической цепи. Применение диска с двумя дорожками, сдвинутыми на четверть периода по пространству (оптический генератор приращений, позволяет определять направление вращения.
Гирометры
Гирометры — это приборы, устанавливаемые на движущихся объектах для определения их угловой скорости.
В зависимости от природы используемого физического явления различают:
а) механические гирометры, основанные на свойствах гироскопа;
б) оптические гирометры на лазерах или волоконной оптике, использующие свойства распространения волн.
Гироскопический измеритель скорости
Гироскоп состоит из ротора, смонтированного в кардановом подвесе, который, будучи раскрученным мотором до большой скорости (~104 об/мин), вращается вокруг оси Y'Y (рис.9.10).
Измеряемая скорость вращения w должна быть направлена по оси Z'Z, перпендикулярной оси Y'Y; из-за этой скорости по является гироскопический момент сил Cgt пропорциональный о) и направленный по Х'Х перпендикулярно осям г У и Z'Z; он стремится повернуть подвес гироскопа. Момент Се уравновешивается моментом упругих сил Сг, создаваемым двумя пружинами; он пропорционален углу а поворота подвеса. В условиях равновесия имеем
![]()
где Cr—ka, k — коэффициент упругости пружины, Се~сзНр Н — кинетический момент инерции ротора. Отсюда получаем
![]()
Угол а поворота подвеса гироскопа пропорционален измеряемой скорости о; с помощью потенциометра угол а преобразуется в пропорциональный ему электрический сигнал.
Порядок величин метрологических характеристик типового-гироскопического измерителя скорости (докум. SFIM) следующий: диапазон измерений (Д. И.) от ±7°/с до ±360 °/с; чувствительность средняя от 57 Ом/7е до 1,11 Ом/°/с; отклонение от линейности <±1,5% от Д. И.; порог чувствительности <±1 от Д. И.; ошибка гистерезиса 0,5% от Д. И.; собственная резонансная частота заключена между 6 и 25 Гц.
Оптические гирометры
Принцип действия. Когда световая волна распространяется в движущейся
среде, преодолеваемое ею расстояние зависит от того, происходит распространение
в направлении движения или в противоположном ему. Пусть, например, между двумя
зеркалами М и Af2, расположенными на расстоянии L друг от друга, распространяется
световая волна. Если зеркала расположены неподвижно в неподвижной среде, то
преодолеваемое волной расстояние от М\ до М2, т. е. an» равно пути волны от М2
до Ми т. е. d2![]()
Когда оба зеркала перемещаются как целое со скоростью V, направленной, например, от Mi к М2, то
|
|
|
|
| Разность этих путей пропорциональна скорости V: |
|
|
а) путь di2 увеличивается, потому что М2 удаляется от фронта волны,
Конструкция.
Во вращающейся среде, образующей
кольцевой резонатор лазера, две волны, распространяющиеся в противоположных
направлениях, создают эффект разности их хода, проявляющийся в двух лазерных
пучках различной частоты. Суперпозиция этих двух пучков порождает биение,
частота Af которого пропорциональна скорости
вращения: ![]() где
А — площадь, охватываемая кольцевым резонатором, L — его периметр, X — средняя длина волн излучения. Такой прибор — лазерный гигрометр —
позволяет измерять очень малые угловые скорости, порядка 10~2°/ч. В
гирометре другого типа два пучка, выходящие из одного и того же лазера,
распространяются в противоположных направлениях по оптическому волокну,
вращающемуся с измеряемой скоростью. На выходе из волокна два пучка
интерферируют; подсчет числа AZ
смещенных из-за вращения интерференционных полос позволяет измерить скорость:
где
А — площадь, охватываемая кольцевым резонатором, L — его периметр, X — средняя длина волн излучения. Такой прибор — лазерный гигрометр —
позволяет измерять очень малые угловые скорости, порядка 10~2°/ч. В
гирометре другого типа два пучка, выходящие из одного и того же лазера,
распространяются в противоположных направлениях по оптическому волокну,
вращающемуся с измеряемой скоростью. На выходе из волокна два пучка
интерферируют; подсчет числа AZ
смещенных из-за вращения интерференционных полос позволяет измерить скорость: ![]() где L — длина волокна, Я —длина волны
излучения лазера. Гигрометр этого типа на оптическом волокне, благодаря увеличению
L при многовитковой намотке, позволяет
измерять угловые скорости примерно в 100 раз меньшие, чем измеряемые обычным
лазерным гигрометром.
где L — длина волокна, Я —длина волны
излучения лазера. Гигрометр этого типа на оптическом волокне, благодаря увеличению
L при многовитковой намотке, позволяет
измерять угловые скорости примерно в 100 раз меньшие, чем измеряемые обычным
лазерным гигрометром.
Заключение
В данной работе были рассмотрены и изучены: датчики на токах Фуко, гироскопические измерители скорости, оптические тахометры, датчики с переменным магнитным сопротивлением, тахометрические генераторы на переменном и постоянном токе. Синхронный генератор. Речь идет о небольшом генераторе переменного тока. Ротор, связанный с осью, скорость которой Статор несет якорную обмотку (одно- или многофазную), в которой возникает синусоидальная э.д.с; ев амплитуда и частота пропорциональны скорости вращения ротора. Могут использоваться на автомобилях в тяжелой промышленности, ветрянных и гидро-электростанциях.
Приложение
|
|
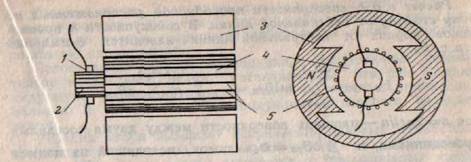
Рас. 1. Принципиальная схема генератора постоянного тока, 1-щетка;
2-коллектор; 3- статор; 4 - ротор; 5-проводники
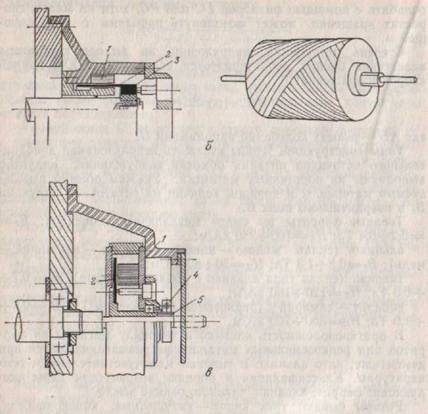
Рис. 2. Различные тнпы тахометрическнх генераторов постоянного тока (документация фирмы С.Е.М.).
а — с катушечным ротором; б — с жолоколообрмвыы ротором (пример выполнения обмотки фирне Muiiniotor S. А.); в — с днсконджльным роторон (деталь конструкции якоря фкрмы С. Е. U. i — магннт; 2 — якорь; 3 — коллектор; 4 — фиксирующее кольцо; 5 — рязрезаая ступица.
![]()
![]() Характеристики
Характеристики
Э.Д.С холостого хода при 10-60 3 3 или 6
1000 об/мин, Ke(V)
Двусторонний допуск Ке, % rtO,5 ±1,5 ±1,5
Линейность, приведенная к 3600 0,15 0,1 О,0б
об/мин, 1эвм, %
Индуктивное сопротивление при 10-^350 36 1
25 °С, Ом
Индуктивность якоря, мГн 8^290 1,6 0,1
Момент инерции ротора, г-смг 1400^-1500 5,3 350-^1500
Максимальная скорость, об/мвн 5000 6000 4000
![]() Масса, г 1500 700 1000-М500
Масса, г 1500 700 1000-М500
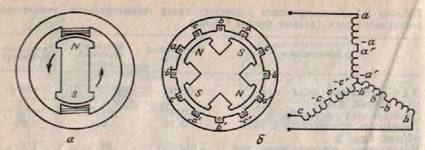
Рис. 3- Синхронный генератор
л —однофазный двухполюсный; б —трехфазный с 4 полюсами в соединением обмоток в звезду измеряется, представляет собой магнит или совокупность магнитов.
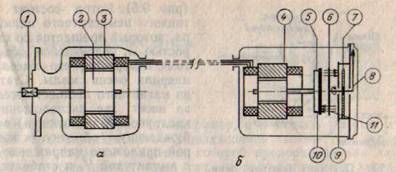
Рис. 4. Тахометр с синхронной электрической передачей (документация фирмы Jaeger).
а — задающий генератор переменного тока; б — индикатор. 1 — квадрат; 2 — постоянный магнит; 3 — статор; 4 — двигатель; 5 — измерительный магнит; 6 — измерительный диск; 7 — регулируемая спиральная пружина; 8— игла; 9 — экранирующая пластин; 10 — узел термокомпенсации; 11 —магнитное поле.
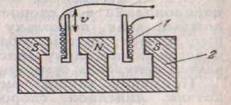
Рис.6. Принцип действия датчика
с подвижной катушкой.
I — катуипм; 2 —постоянный магнит.
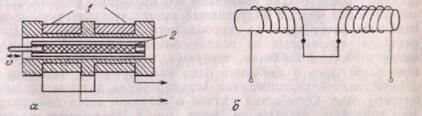
Рис.7. Датчик скорости с подвижным магнитом (документация фирмы Schaevitz).
а — конструкция; б — соединение измерительных катушек.
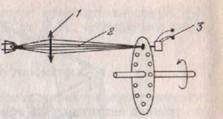
Рис.9.Принцип действия оптического тахометра.
J —линза; 2 — световой пучок; 3— оптическнй приемник.
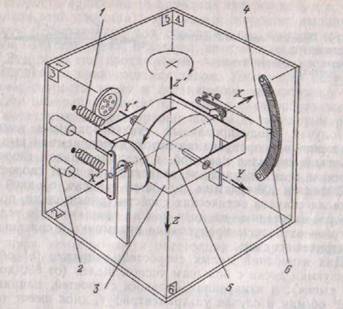
Рис. 10. Конструкция гироскопа (документация фирмы SFIM).
1 — пружина; 2 — амортизатор; 3 —карданов подвес; 4 — курсор; 5 — ротор; 6 — потенцвомегр.
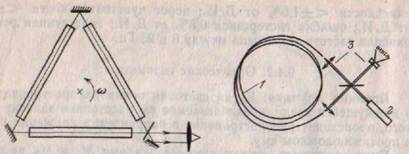
рис 11. Оптический гирометр.
б — лааерный с оптическим волокном, / — оптическое волокно; 1 — лазер; 3 — интерференционные полосы.