
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Система автоматического регулирования напряжения сварочной дуги
Курсовая работа: Система автоматического регулирования напряжения сварочной дуги
Министерство образования Российской Федерации
Тульский государственный университет
КАФЕДРА АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
Система автоматического регулирования напряжения сварочной дуги.
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по курсу
«Моделирование систем управления»
Выполнил студент группы 220121
_________ Батищев Д.В.
(подпись)
Проверил
_________ Ермаков А.С.
(подпись)
Тула 2004
Аннотация
В данной курсовой работе рассмотрен принцип действия системы автоматического управления напряжения сварочной дуги, построена математическая модель данной системы. Приведены сигнальные графы системы, структурная схема, определены передаточные функции системы.
Эта работа предназначена для закрепления материала по курсу «Моделирование систем управления».
Пояснительная записка содержит 39 листов и 21 рисунок.
Содержание
Введение
1. Принцип действия системы автоматического регулирования напряжения сварочной дуги
2. Функциональная схема САР напряжения сварочной дуги.
3. Сигнальный граф САР напряжения сварочной дуги.
4. Система дифференциальных уравнений.
5. Линеаризация системы дифференциальных уравнений.
6. Взвешенный сигнальный граф и структурная схема линейной математической модели САР.
7. Определение передаточных функций САР напряжения сварочной дуги.
Заключение.
Список использованной литературы.
Введение
Современные технические устройства чрезвычайно многообразны. Они предназначены для решения всевозможных задач различными методами, причем при конструировании каждого устройства предусматривается возможность воздействия на его работу для получения оптимальных результатов.
Воздействия необходимы прежде всего для сокращения затрат времени, материалов, энергии и т.п. Обычно каждое техническое устройство создается не для решения одной строго определенной задачи, а рассчитано на ряд иногда значительно различающихся между собой задач. Наконец, на каждое техническое устройство влияют различные внешние факторы. Поэтому, если при любом вероятном сочетании внешних условий мы хотим получить любой из возможных результатов работы устройства, в его поведения нужно что-то изменять или в некоторые моменты времени, или даже непрерывно, т.е. осуществлять управление и вне операции, позволяющие нужным образом изменять поведение технических устройств, достигается операциями управления.
Увеличение мощности и быстродействия машин и механизмов, повышение требований к точности различных процессов и появление новых, более сложных процессов приводит к тому, что человек становится не в состоянии управлять или с необходимой быстротой и точностью. Таким образом, в ходе технического процесса возникла потребность исключить человека из операции управления для более совершенного их выполнения.
Устройство, выполняющее операции управления без непосредственного и непрерывного участия человека, называется автоматическим управляющим устройством. В некоторых автоматических устройствах требуется поддерживать постоянным значение какой-либо величины. Эта величина называется регулируемой величиной.
Операция поддержания равенства регулируемой величины ее установленному значению называется регулированием. Поэтому автоматические системы, осуществляющие эту операцию без непосредственного участия человека, называются системами автоматического регулирования.
Ниже рассматриваются система автоматического регулирования сварочной дуги, регулируемой величиной в которой является напряжение сварочной дуги.
1. Принцип действия системы автоматического регулирования сварочной дуги
Исследуемая САР принципиальная схема которой изображена на рисунке 1 предназначена для обеспечения непрерывной автоматизированной сварки подаваемых на конвейере деталей. САР регулирует величину напряжения сварочной дуги. Сигналом задания является напряжение, подаваемое с делителя напряжения на одну из обмоток возбуждения генератора. Основными возмущающимися воздействиями в данной САР являются:
- напряжение сварочного трансформатора Uc;
- напряжение, подаваемое на обмотку возбуждения генератора Uв;
- напряжение подаваемое на обмотку возбуждения двигателя Uвд;
-
скорость вращения привода
генератора.![]() ;
;
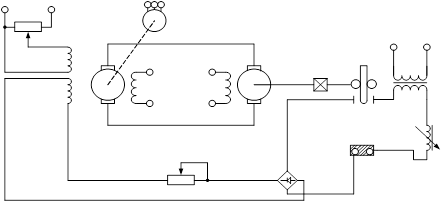
Рисунок 1 - Принципиальная схема САР напряжения сварочной дуги
Сигналом рассогласования в данной САР является разность магнитных потоков, создаваемых обмотками задающего устройства и устройства обеспечивающего обратную связь в системе: Ф2+Ф1.
САР состоит из делителя напряжения с подключенной к нему одной из 3-х обмоток возбуждения генератора, исполнительного двигателя, редуктора, роликового привода электрода, сварочного трансформатора, ко вторичной обмотке которого последовательно подключены дроссель и электроды сварочного устройства, а также в состав САР входит диодный мост, на вход которого подключены электроды, а на выход одна из обмоток возбуждения сварочного генератора.
Делитель напряжения выполняет функцию задающего устройства, с него подается задающий сигнал.
Сварочный генератор является одновременно сравнивающим и усилительным устройством. Он имеет 3-и обмотки возбуждения. Две из них служат для образования сигнала рассогласования (Ф2+Ф1), а третья необходима для создания на выходных клеммах Еэ даже при нулевом сигнале рассогласования, т.к. в системе должна обеспечиваться непрерывная подача одного электрода сварочного устройства. Таким образом, на величину Еэ влияет суммарный магнитный поток
Ф*=Ф2+Ф1
Якорь сварочного генератора приводится в действие
внешним приводом, угловая скорость вращения которого -![]() .
.
Двигатель выполняет роль исполнительного устройства. Его обмотка возбуждения питается напряжением Uвд, а напряжение на обмотку управления подаётся с сварочного генератора. Это величина Еэ.
Роликовый механизм привода электрода, соединённый с двигателем через редуктор, также является исполнительным устройством и служит для непрерывной подачи электрода.
Объектом управления в данной САР является сварочный аппарат, состоящий из сварочного трансформатора с подключенными к нему сварочными электродами. Один электрод непрерывно подаётся к месту сварки описанным выше приводом, так как в процессе сварки происходит перенос вещества с конца этого электрода на свариваемые детали. Вторым электродом служат сами детали, подаваемые на конвеере. Сварочный трансформатор служит для создания напряжения на электродах. В его цепь включен также дроссель, служащий для сглаживания амплитуды колебаний тока в цепи сварки.
Диодный мост, на вход которого подается напряжение сварочной дуги Uд, является выпрямительным устройством. С его выхода подается напряжение на потенциометр который является корректирующим устройством. С его выхода питается индуктивная обмотка возбуждения генератора служащая для создания сигнала рассогласования. Эта катушка создает магнитный поток Ф2.
Функциональная схема исследуемой САР с указанием её отдельных элементов, их технической сущности и роли, выполняемой этими элементами, изображена на рис.2.
Данная САР находится в состоянии равновесия, если сигнал рассогласования равен нулю. При этом на работу генератора оказывает влияние только магнитный поток Фв. Таким образом осуществляется подача электрода с постоянной скоростью Vn, равной скорости его сгорания V3. Расстояние между электродами остаётся постоянным. Сопротивление сварочной дуги Rq тоже постоянно. Напряжение дуги Uq не изменяется.
Если произошло скачкообразное увеличение сигнала задания U3, то увеличивается магнитный поток Ф1. При этом суммарный поток, равный Ф*=Ф2+Ф1 уменьшается. Скорость подачи электрода Vn, уменьшается, но скорость его сгорания V3 сгорания V3 в этот момент остаётся прежней, поэтому расстояние между электродами увеличивается. Растет сопротивление сварочной дуги Rq, напряжение Uq увеличивается. При этом увеличивается сигнал обратной связи UR. Магнитный поток Ф2 достигает величины Ф1. Сигнал рассогласования становится равным нулю. Скорость подачи электрода увеличивается до величены V3. Расстояние между электродами становится неизменным, но уже на другом уровне. Величина Uq увеличилась.
Пусть теперь произошло увеличение напряжения питания сварочного трансформатора Uс. ЭДС во вторичной обмотке трансформатора Ет увеличивается. Возрастает ток Iq сварочной цепи. Напряжение сварочной дуги Uq увеличивается. Возрастает сигнал обратной связи UR. Рассуждая как и ранее, заметим, что скорость подачи электрода Vn увеличится. Сопротивление Rq уменьшится и напряжение Uq упадет до прежнего уровня.
2. Функциональная схема САР напряжения сварочной дуги
На основе вышеизложенного можно построить функциональную схему САР напряжение сварочной дуги (Рисунок 2.)
Используемые в схеме обозначения:
ЗУ – задающее устройство
СУ – сравнивающее устройство
УУ – усиливающее устройство
ИУ – исполнительное устройство
ОУ – объект управления
ИзУ – измерительное устройство.
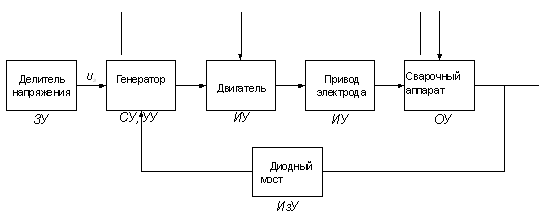
Рисунок 2 - Функциональная схема САР напряжения сварочной дуги
3. Сигнальный граф САР напряжения сварочной дуги
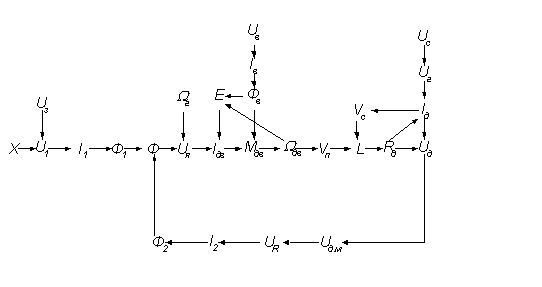
Рисунок 3 - Сигнальный граф САР напряжения сварочной дуги
Для исследования САР необходимо уметь предсказать изменение во времени любой величины, действующей в системе, при заданной форме изменения той или иной входной величины – управляющего или возмущающего воздействия. Возможность такого предсказания дает математическая модель САР.
Вид математической модели САР (системы ее дифференциальных уравнений) зависит прежде всего от того, совместное изменение во времени каких переменных отражает данная модель и какова качественная структура взаимосвязи переменных. Структура взаимосвязи переменных в системе отражает сигнальный граф САР.
Сигнальный граф является направленным графом и как таковой представляет собой совокупность некоторого множества элементов (множество вершин) и некоторого множества упорядоченных пар этих элементов (множества направленных ребер). В сигнальном графе роль множества вершин играет множество сигналов в системе, совместное изменение которых во времени описывается данной математической моделью.
Ребра сигнального графа, входящие в некоторую вершину, указывают совокупность значений или законов измерения во времен каких сигналов полностью определяет значение или закон изменения во времени данного сигнала, соответствующего данной вершине.
Сигнальный граф полностью определяет структуру системы дифференциальных уравнений, входящих в математическую модель системы. Множество вершин сигнального графа задает множество переменных, совместное изменение которых описывается данной моделью. Из них вершины, имеющие хотя бы по одному входящему ребру, соответствуют переменным, функции измерения которых во времени являются решениями системы дифференциальных уравнений (выходам модели). Такие вершины называются внутренними вершинами сигнального графа. Число внутренних вершин равно общему числу уравнений в системе.
Вершины, имеющие только исходящие ребра и не имеющие входящих ребер, соответствуют переменным, через которые передается влияние внешней среды на поведение САУ, т.е. задающему и возмущающим воздействиям (входам модели). Такие вершины сигнального графа называются внешними.
Математическая модель САУ призвана прежде всего устанавливать зависимость изменения во времени управляемой величины (Qn – в случае САР температуры печи) от изменения во времени внешних воздействий. Число внешних вершин сигнального графа модели равно числу внешних воздействий, поэтому их число является заданным.
Внешние вершины сигнального графа представляют собой следующие сигналы:
Uз [B] – сигнал задания;
Uс [B] – напряжение сети трансформатора (питание дуги);
![]() – угловая скорость вращения
генератора;
– угловая скорость вращения
генератора;
Uв [B] – напряжение приложенное к обмотке возбуждения двигателя;
Х [м] – параметр, характеризующий положение ручки потенциометра Rp1.
В минимальном варианте сигнальный граф математической модели САР содержит только одну внутреннюю вершину, соответствующую управляемой переменной (напряжению дуги). Однако, обычно разработка математической модели САУ начинается с построения наиболее подробного сигнального графа, множество внутренних вершин которого включает в себя как можно больше промежуточных переменных. Затем производится исключение мнимых внутренних вершин с помощью специальных правил преобразования сигнальных графов.
Внутренние вершины сигнального графа представляют собой следующие сигналы:
U1- напряжение возникающее при перемещении ручки потенциометра Rр1.
I1- ток возникающий в обмотке возбуждения генератора (1), зависящий от значения величины напряжения U1.
Ф1- магнитный поток возникающий в обмотке возбуждения генератора (1), пропорционально току I1.
Ф*- суммарный магнитный поток, зависящий от значений магнитных потоков Ф1 и Ф2.
UR- напряжение вырабатываемое генератором.
Iдв- ток протикающий через обмотку якоря двигателя, пропорционально напряжению вырабатываемого на генераторе.
М – вращяющий момент двигателя, созданный взаимодействием Iдв и Фв.
Мс - момент сопротивления нагрузки на валу двигателя.
Ев- противо –ЭДС якоря возникающая в результате пересечения витков обмотки якоря при его вращении с магнитным потоком обусловленным обмоткой возбуждения двигателя.
Фв- магнитный поток создаваемый Iв, проходящим через обмотку возбуждения двигателя.
Iв- ток в обмотке возбуждения двигателя, вызываемый Uв
![]() дв- угловая скорость ротора
двигателя, зависящая от М дв.
дв- угловая скорость ротора
двигателя, зависящая от М дв.
Vn – скорость подачи электрода, зависящая от угловой скорости якоря двигателя и передаточного отношения редуктора.
L – зазор между подложкой и электродом.
Vс – скорость сгорания подложки.
Iд. - ток сварочной дуги.
Rд. – сопрротивление сварочной дуги.
I2 – ток, возникающий в обмотке возбуждения генератора (2), зависящий от величины напряжения Uдм.
Ф2 – магнитный поток, возникающий в обмотке возбуждения генератора (2), пропорциональный току I.
Uдм. – постоянное напряжение дуги на выходе выпрямительного моста.
Пояснение связей вершин в сигнальном графе (Рисунок 3) со ссылкой на соответствующие законы физики, электротехники и так далее будет дано в следующем пункте при непосредственных уравнений для данной САР.
4. Система дифференциальных уравнений
Структура системы дифференциальных уравнений САР полностью определяется ее сигнальным графом. Под структурой системы дифференциальных уравнений будем понимать, во-первых, множество функций времени, задаваемых извне, во-вторых, множество искомых функций времени, относительно которых составляется система дифференциальных уравнений и, в-третьих, список дифференциальных уравнений с указанием для каждого уравнения, какие функции времени являются для него заданными, а какая функция – искомой.
Множество сигналов, задаваемых извне, полностью определяется множеством внешних вершин сигнального графа, а множество искомых сигналов - множеством внутренних вершин. Каждой внутренней вершине соответствует одно уравнение, причем сигнал, соответствующий этой вершине является для данного уравнения искомым. Ребра, входящие в данную вершину, указывают, какие сигналы являются заданными для данного уравнения. Таким образом, общее число уравнений равно общему числу внутренних вершин сигнального графа.
Уравнение, соответствующее некоторой вершине сигнального графа, должно определять значение или закон изменения физической величины, символически обозначаемой этой вершиной, если заданы значения или законы изменения во времени физических величин, соответствующих вершинам, из которых исходят ребра, ведущие в данную вершину. При составлении каждого уравнения необходимо отдавать себе отчет, насколько это уравнение идеализирует реальную связь данных переменных. Если мгновенное значение переменных, соответствующих исходным вершинам, полностью определяет мгновенное значение данной переменной, то уравнение имеет вид обычной функции, например,
![]()
Если же описываемая связь не является мгновенной, то уравнение будет дифференциальным, т. е. связывающим не только мгновенные значения сигналов, но и мгновенные значения их производных в каждый момент времени t:

Составить уравнение данной связи - это значит полностью определить вид функции f(…) либо f1(…) и f2(…), если уравнение дифференциальное. В исходной системе уравнений эти функции могут быть заданы любым способом: выражены в виде формул через элементарные функции или заданы в виде графиков. При этом преимущество следует отдавать аналитическому представлению функций, входящих в уравнения.
Таким образом, для САР напряжения сварочной дуги, сигнальный граф которой приведен на Рисунке 3, система дифференциальных уравнений имеет вид (для простоты записи аргумент t переменных величин будем опускать):
1) Напряжение U1 пропорционально произведению задающего напряжения Uз и перемещения ручки потенциометра:
![]()
где К1 – коэффициент пропорциональности.
![]()
2) Ток I1 в обмотке возбуждения генератора определяется величиной напряжения U1. В силу того, что обмотка возбуждения обладает значительной индуктивностью, эта связь имеет инерционный характер и описывается дифференциальным уравнением
![]()
где К2 – индуктивность обмотки возбуждения;
К3 – ее активное сопротивление.
![]() ,
, ![]()
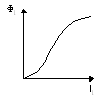
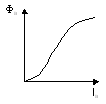
3) Поток возбуждения генератора Ф1 зависит только от мгновенного значения тока возбуждения I1. Эта связь трудно выражается аналитически. Представим ее кривой намагничивания стали в статоре генератора:
4) Суммарный магнитный поток Ф, зависит от значений магнитных потоков Ф1 и Ф2 :
Ф= Ф1 + Ф2
5) Напряжение Uя, возникающее на щетках якоря генератора, зависит как от магнитного потока возбуждения генератора Ф, так и от скорости принудительного вращения якоря Wг. Согласно известным законам физики напряжение Uя пропорционально каждой из переменных Ф и Wг., т.е. пропорционально их произведению:
![]()
где К4 - электрическая постоянная якоря генератора.
6) Ток Iдв, протекающий по обмотке якоря двигателя, определяется разностью напряжения на щетках якоря Uя и противо-ЭДС Е, вырабатываемой вращающимся якорем.
Эта связь является инерционной в силу того, что якорь имеет значительную индуктивность, и описывается дифференциальным уравнением
![]()
где К5 - индуктивность обмотки якоря, К6 - ее активное сопротивление.
![]() ,
, ![]()
7) Вращающийся момент на валу двигателя Мдв определяется мгновенными значениями тока Iдв, протекающего по виткам якорной обмотки, и магнитного потока, возбуждения Фв, пересекающего витки якоря. Величина момента Мдв пропорциональна каждой из переменных Iдв и Фв:
![]()
где К7 - моментная постоянная якоря двигателя.
![]()
8) Угловое ускорение вала двигателя есть производная от угловой скорости его вращения Wдв. В свою очередь, угловое ускорение вала согласно закону Ньютона пропорционально действующему на него суммарному вращающему моменту, который равен разности вращающего момента Мдв и момента сопротивления нагрузки Мс, приведенного к валу двигателя:
![]()
где К8 - суммарный момент инерции якоря, редуктора и нагрузки, приведенный к валу двигателя.
9) Якорь двигателя, вращающийся со скоростью Wдв в магнитном потоке возбуждения Фв, фактически представляет собой генератор, вырабатывающий противо-ЭДС Е. Поэтому вид уравнения, связывающего Е с Wдв и Фв, такой же как и в п.5:
![]()
где К9 - электрическая постоянная.
![]()
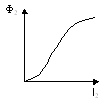
10) Связь потока возбуждения двигателя Фв с током возбуждения Iв выразим аналогично п. 3 в виде кривой намагничивания стали в статоре двигателя:
11) Уравнение связи тока возбуждения двигателя Iв с напряжением возбуждения Uв аналогично уравнению в п.2 для тока возбуждения генератора:
![]()
где К10 и К11 - соответственно индуктивность и активное сопротивление обмотки возбуждения двигателя.
![]() ,
, ![]()
12) Скорость подачи электрода Vп пропорциональна скорости двигателя Wдв
![]()
где К12- коэффициент передачи редуктора.
![]()
13) Зависимость сопротивления сварочной дуги Rд и тока сварочной дуги Iд от напряжения трансформатора Uт
![]()
где К13, К14- коэффициенты пропорциональности
![]()
![]()
14) Скорость сжигания подложки Vс пропорциональна току сварочной дуги Iд
![]()
где К15- коэффициент пропорциональности
![]()
15) Величина зазора между электродом и подложкой L пропорциональна суммарной скорости, которая равна сумме скорости подачи электрода Vп и скорости сгорания подложки Vс
![]()
где К16- коэффициент пропорциональности
![]()
16) Сопротивление сварочной дуги Rд пропорционально зазору между электродом и подложкой L
![]()
где К17- коэффициент пропорциональности
![]()
17) Напряжение сварочной дуги Uд зависит от тока сварочной дуги Iд, а также от сопротивления сварочной дуги Rд . Напряжение сварочной дуги Uд пропорционально каждой из переменных Iд и Rд ,т.е. пропорционально их произведению:
![]()
где К18- коэффициент пропорциональности
![]()
18) Напряжение снимаемое с диагонали диодного моста пропорционально Uд.м напряжению сварочной дуги Uд
![]()
где К19- коэффициент пропорциональности
![]()
19) Уравнение связи тока возбуждения генератора I2 с напряжением возбуждения Uд.м аналогично уравнению в п.2 для тока возбуждения генератора:
![]()
где К10 и К11 - соответственно индуктивность и активное сопротивление обмотки возбуждения генератора.
![]() ,
, ![]()
20) Связь потока возбуждения генератора Ф2 с током возбуждения I2 выразим аналогично п. 3 в виде кривой намагничивания стали в статоре генератора:
21) Напряжение на выходе трансформатора Uт пропорционально напряжению сети Uс
![]()
где К22- коэффициент трансформации
![]()
22) Напряжение в потенциометре UR пропорционально напряжению диодного моста Uд.м
![]()
где К23- коэффициент пропорциональности
![]()
5. Линеаризация системы дифференциальных уравнений
Дифференциальные уравнения могут быть как линейные, так и нелинейными. Нелинейные дифференциальные уравнения вносят значительные затруднения в решение реальных задач, особенно в тех случаях, когда они имеют высокий порядок. Поэтому очень часто стараются заменить в первом приближении нелинейное дифференциальное уравнение линейным, анализ которого выполняется значительно проще. Методика выполнения такой замены называется линеаризацией.
Линеаризация системы дифференциальных уравнений САУ основана на двух предложениях.
1. Предполагается, что при номинальной работе системы отклонения внешних воздействий от их постоянных номинальных значений малы, а следовательно, малы и отклонения всех переменных в системе.
Однако, необходимо отметить, что это предположение выполняется далеко не всегда.
2. Все функции от переменных, входящих в данное уравнение, не имеют разрывов и являются гладкими при номинальных значениях аргументов. Другими словами, предполагается, что для каждой функции существуют первые производные по всем аргументам в точке, соответствующей номинальному режиму. В противоположном случае, если хотя бы одна из функций, входящих в уравнения, имеет разрыв в точке номинального режима, либо не является гладкой в этой точке, то такое уравнение, а также сама функция называются существенно нелинейными. Линеаризация таких уравнений и функции невозможна.
Номинальные значения переменных обозначаются большими буквам с верхним нулевым индексом:
X(t)= X0= const, U(t)= U0= const и т.д
Отклонения переменных обозначаются соответствующими маленькими буквами:
x(t)=X(t) – X0 и т.д
Очевидно, что в номинальном режиме отклонения всех переменных в системе, а также производные отклонений по времени равны нулю.
Дифференциальное уравнение является линейным, если функция f1(…) и f2(…) в левой и правой частях являются линейными комбинациями переменных и их производных:

В частном случае, если функции f1(...) и f2(...) не содержат в качестве аргументов производных искомой функции и заданных функций, дифференциальное уравнение (1) превращается в обычную функцию определяющую зависимость переменной X(t) в какой-либо момент от мгновенных значений аргументов Y(t), ..., Z(t) в тот же момент:
![]() (3)
(3)
Такой вид математической модели означает, что моделируемый объект рассматривается как статический (безинерционный). САР напряжение сварочной дуги-это статическая система, так как всегда будет присутствовать ошибка регулируемого параметра, в силу нелинейной зависимости числа оборотов двигателя от величины магнитного потока возбуждающей компенсирующей обмотке 2.
Аналитическая запись линейной функции содержит только суммы аргументов, умноженных, быть может, на постоянные коэффициенты
![]()
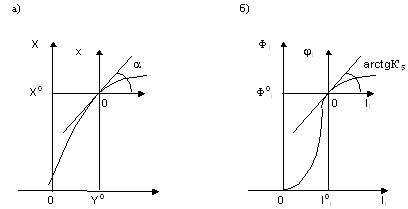
Если функция имеет только один аргумент, то она может быть задана в виде графика. График линейной функции имеет вид прямой линии, проходящей через начало координат:
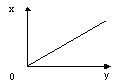
Заметим, что если график, имеющий вид прямой линии, не проходит через начало координат, то соответствующая ему функция не является линейной. Вернемся к системе уравнений САР напряжение сварочной дуги. Очевидно, что в этой системе линейными являются уравнения в пп. 2,4,6,8,11,12,14,15,16,18,19,20,21,22. К нелинейным относятся уравнения в пп. 1,3,5,7,9,10,13,17.
В общем случае линеаризация заключается в разложении функции в ряд Тейлора в окрестности номинальных значений аргументов и отбрасывании членов ряда, порядок которого выше первого.
При проведении линеаризации конкретной функции необходимо внимательно относится к номинальным значениям переменных, отмечая те из них, которые равны нулю в установившемся режиме работы данной САР. Если номинальные значения некоторых переменных равны нулю, то могут обратиться в нуль коэффициенты при отдельных аргументах в выражении линеаризованной функции. Такие аргументы необходимо отбросить.
Для тех дифференциальных уравнений и функций исходной модели САР, которые являются линейными, переход к отклонениям сводится к замене обозначений полных переменных на обозначения их отклонений.
Итак, линеаризованная система уравнений имеет вид:
1) Для линеаризации зависимости напряжения подаваемого на компенсационную обмотку генератора U1 от задающего напряжения Uз и перемещения ручки потенциометра Х, необходимо найти частные производные U1 по переменным Uз и Х в точках номинальрого режима
Линеаризированная зависимость примет вид:
![]()
2) 
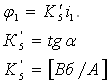
3) Зависимость магнитного потока возбуждения Ф1 генератора от величины тока возбуждения I1 задана графически. Отметив на графике точку номинального режима и проведя касательную к графику в этой точке, получим линеаризованную зависимость магнитного потока от тока в отклонениях.
Тангенс угла наклона к оси i1 обозначим К5. Линеаризованная зависимость примет вид
4) ![]()
5) Для линеаризации зависимости напряжения на щетках якоря генератора Uя от величины магнитного потока возбуждения Ф и скорости привода генератора Wг необходимо найти частные производные Uя. по переменным Ф и Wг в точке номинального режима:
![]()
Линеаризованная зависимость:
6) 
7) Линеаризация зависимости вращающего момента на валу двигателя Мдв от тока якоря Iдв и величина потока возбуждения Фв, аналогична линеаризации уравнения п. 1, 5. Линеаризованная зависимость:
8) 
9) Линеаризация зависимости скорости вращения якоря двигателя Wдв в магнитном потоке возбуждения Фв от противо-ЭДС Е проводится аналогично пп.1,5,7:
10) Линеаризация графически заданной величины магнитного потока возбуждения двигателя Фвд от тока возбуждения проводится аналогично пп. 3
11) Линеаризация уравнение связи тока возбуждения двигателя Iв с напряжением возбуждения Uв
12) Линеаризация скорость подачи электрода Vп от скорости двигателя Wдв

13) Линеаризация зависимость сопротивления сварочной дуги Rд и тока сварочной дуги Iд от напряжения трансформатора Uт аналогична п.1,5,7,9.
Пусть ![]() ,тогда исходное дифференциальное
уравнение примет вид:
,тогда исходное дифференциальное
уравнение примет вид:
Линеаризованная зависимость примет вид:
14) ![]()
15) Линеаризованная зависимость величины зазора между электродом и подложкой L от суммарной скорости подачи электрода Vп и скорости сгорания подложки Vс
![]()
16) ![]()
17) Линеаризация напряжение сварочной дуги Uд от тока сварочной дуги Iд, а также от сопротивления сварочной дуги Rд аналогично пп. 1,5,7,9,13:
18) ![]()
19) Линеаризация уравнения связи тока возбуждения генератора I2 с напряжением потенциометра UR аналогично уравнению в п.2 для тока возбуждения генератора:
20) Линеаризация графически заданной величины магнитного потока возбуждения двигателя Ф2 от тока возбуждения проводится аналогично п. 3, 10:
![]()
21) ![]()
22) ![]()
6. Взвешенный сигнальный граф и структурная схема линейной математической модели САР
Для определения закона изменения во времени данной выходной величины необходимо исключить из системы уравнений все остальные переменные, являющиеся в данном случае промежуточными, и получить дифференциальное уравнение, связывающее рассматриваемую выходную переменную с входной, представленной заданной функцией времени в правой части уравнения.
Операции исключения промежуточных переменных из сложных дифференциальных уравнений очень трудоемки и громоздки. Поэтому возникает потребность упростить эти операции. С этой целью в линейных математических моделях САУ обычно используют операционную форму записи линейных дифференциальных уравнений, представляя уравнение каждой связи сигнального графа в виде так называемой передаточной функции.
Замена дифференциальных уравнений передаточными функциями позволяет представить систему линейных дифференциальных уравнений САУ в виде взвешенного сигнального графа, либо в виде структурной схемы.
Существенным ограничением на применение передаточных функций при исследовании линейных САУ является то обстоятельство, что передаточная функция линейного дифференциального уравнения ставит в соответствие каждой конкретной функции в правой части (входному сигналу) одно решение дифференциального уравнения, удовлетворяющее нулевым начальным условиям.
Для перехода к операторной форме записи необходимо оператор дифференциального уравнения d/dt заменить символом p, с которым в дальнейшем можно поступать как с сомножителем.
В операторной форме записи дифференциальное уравнение

примет вид ![]()
Вынеся переменные x(t)и y(t) за скобки в левой и правой частях, получим операторную форму дифференциального уравнения:
![]()
По своей форме это
уравнение является алгебраическим, а не дифференциальным. Разрешим его
относительно искомой переменной x(t), разделив обе части ни сомножитель ![]()

Мы получили очень наглядную запись линейного дифференциального уравнения.
Искомая переменная x(t) представлена как результат умножения независимой переменной y(t) на символический коэффициент
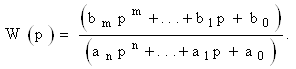
Этот коэффициент W(p) называется передаточной функцией данного дифференциального уравнения. Передаточная функция условно и в то же время наглядно отражает структуру и численные значения коэффициентов дифференциального уравнения, связывающего две переменные - независимую (входную) y(t) и искомую (выходную) x(t):
![]()
Таким образом, передаточная функция - его один из удобных способов записи линейного дифференциального уравнения.
Запишем в операторной форме систему линеаризованных дифференциальных уравнений исследуемой САР. Коэффициенты, возникающие при переходе к операторной форме записи, будем нумеровать по порядку К1, К2, К3,…(большими буквами без штрихов, нумерованные по порядку возрастания). Постоянные времени будем также нумеровать по порядку их возникновения Т1, Т2,…
Если уравнение не является дифференциальным, то его вид не изменяется:
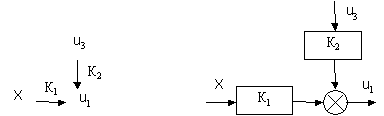
1) u1=K1х+ K2u3;
W1(p )=K1. W2(p )=K2.
где K1=.K'1 и K2.=K'2
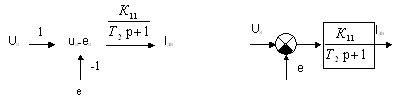
2) Заменим оператор дифференцирования в левой части сомножителем р и вынесем за скобки переменную iвг. Разрешив полученное уравнение относительно iвг, получим запись дифференциального уравнения в виде передаточной функции:
![]()
![]()
где ![]()
3) j1=K6 i; W4(p)=K6, где К6=К5'.
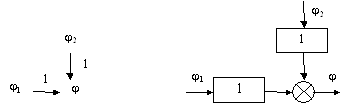
4) j=j1+j2
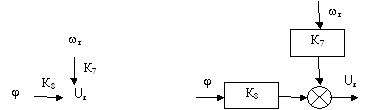
5) uя=K8j+K7wг ; W5(p)=K7; W6(p)=K8, где К7 =K'7, K8=K'6.
6) ![]()
![]()
![]()
где ![]()
7) mqв=K12iдв+K13jв; W8(p)=K12; W9(p)=K13, K12=K'10, K13=K'11.
8) ![]()
![]()
![]()
9) е=K17w г+K16jв;
W12(p)=K17; W11(p)=K16, где K16=K'13, K17=K'14.
10) jв=K18iв; W13(p)=K18, где K18=K'15.
11) ![]()
![]()
где 
12) ![]()
13) ![]()
![]()
где 
14) ![]()
15) ![]() ;
;
![]()
16) ![]()
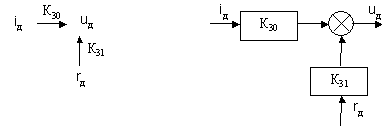
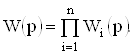
17) uд=K30iд+ K31rд;
W21(p )=K30. W22(p )=K31.
где K30=.K'28 и K31.=K'29
18) ![]()
19) ![]()
![]()
где 
20) j2=K36i2; W25(p)=K26, K36=K'33
21) uс=K37 uт ; W26(p)=K37, K37=K'34
22) ![]()
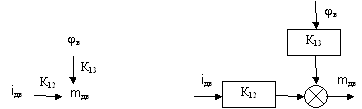
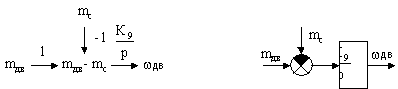
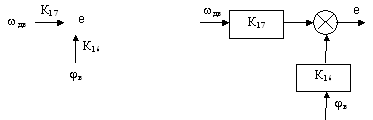
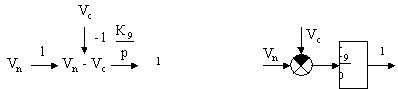
Взвешенный сигнальный граф и структурная схема являются эквивалентными формами наглядного графического представления системы линейных дифференциальных уравнений САР. Как взвешенный граф, так и структурная схема используют запись дифференциальных уравнений связей в виде передаточных функций.
Взвешенный сигнальный граф по своей структуре почти полностью совпадает с исходным сигнальным графом (Рисунок 3), каждому его ребру приписан вес, имеющий вид передаточной функции. Взвешенный сигнальный граф САР напряжения сварочной дуги приведен на Рисунке 4.
Порядок построения структурной схемы линейной математической модели аналогичен порядку построения исходного сигнального графа. Сначала слева направо располагают основную цепочку связей переменных от сигнала задания к управляемой величине. Затем внизу справа налево строят цепочку главной обратной связи. После этого в произвольном порядке достраивают остальные связи математической модели.
Структурная схема САР напряжения сварочной дуги приведена на Рисунке 5.
7. Определение передаточных функций САР напряжения сварочной дуги
Дифференциальное уравнение, связывающее входную переменную линейной математической модели САР, соответствующей какой-нибудь внешней величине сигнального графа, с выходной переменной, соответствует одной из внутренних вершин, называется сквозным дифференциальным уравнением от входа к выхода. Сквозное дифференциальное уравнение называют также уравнением замкнутой системы от данного входа к данному выходу.
Передаточная функция, соответствующая сквозному дифференциальному уравнению, называется сквозной передаточной функцией САР от данного входа к данному выходу. Другое название – передаточная функция замкнутой системы от данного входа к данному выходу.
Одним из входов математической модели САР является задающее воздействие. Этот вход называется главным входом. Аналогично среди выходов математической модели САР выделяют главный выход, под которым понимают регулируемую величину.
Сквозную передаточную функцию, связывающую главный выход модели САР с главным входом, называют главным оператором САР. Его обозначают Ф(р).
Для определения сквозной передаточной функции САР от заданного входа к заданному выходу необходимо положить равным нулю все прочие входные сигналы, что равносильно удалению из структурной схемы соответствующих цепочек элементов. Затем необходимо с помощью применения подходящих правил преобразования структурных схем привести структурную схему к простейшему виду - одному элементу, входной и выходной сигналы которого соответствуют заданным входу и выходу математической модели САР. Передаточная функция этого элемента и есть искомая сквозная передаточная функция.
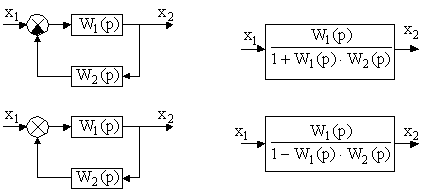
В схеме можно выделить три характерных соединения элементов: последовательное, параллельное, и обратное (в виде отрицательной либо положительной обратной связи). Группа последовательно соединенных элементов структурной схемы при условии, что между элементами нет сумматоров и ответвлений сигнала, может быть заменена одним элементом с передаточной функцией, равной произведению передаточных функций всех элементов:
![]()
Группу параллельно соединенных элементов структурной схемы можно заменить одним элементом с передаточной функцией, равной сумме передаточных функций всех элементов:

Если сигнал с выхода элемента обратной связи вычитается из сигнала, поступающего на вход элемента прямой цепи, то обратная связь является отрицательной, а если прибавляется – положительной. Такую пару элементов можно заменить одним элементом с передаточной функцией, равной дроби, числитель которой представляет собой передаточную функцию элемента прямой цепи, а знаменатель - произведение передаточных функций элементов прямой цепи и обратной связи со знаком плюс, если обратная связь отрицательная, или со знаком минус, если обратная связь положительная, увеличенное на единицу:
При преобразовании структурной схемы можно использовать правила переноса точки разветвления и точки суммирования сигналов. Пусть точка разветвления переносится против направления прохождения сигнала. Тогда в переносимую ветвь нужно включить элемент, передаточная функция которого равна передаточной функции элемента между прежней и новой точками разветвления (а). Пусть точка разветвления переносится по направлению прохождения сигнала. Тогда в переносимую ветвь нужно включить элемент с передаточной функцией, обратной передаточной функции элемента между новой и прежней точками разветвления (б). Если точка суммирования переносится по направлению прохождения сигнала. При этом в переносимую ветвь нужно включить элемент с передаточной функцией, равной передаточной функции элемента между прежней и новой точками суммирования (в). Если точка суммирования переносится против направления прохождения сигнала, то в переносимую ветвь нужно включить элемент с передаточной функцией, обратной передаточной функции элемента между новой и прежней точками суммирования (г).
а). 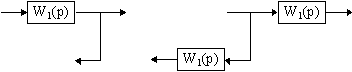
б). 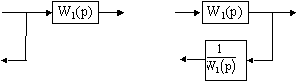
в). 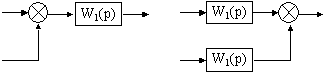
г).
1. Определение главного оператора САР по взвешенному сигнальному графу с помощью преобразования структурных схем (см. Рисунки 6-11)
На каждом этапе делаем промежуточные вычисления в итоге получим формулу главного оператора САР Ф(р) (Рисунок 11). После преобразования имеем:
![]()
Для того, чтобы перейти к стандартной форме записи передаточной функции, раскроем скобки в знаменателе и введем обозначения:

![]()
![]()
![]()
![]()
где 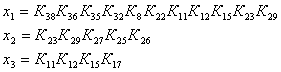
Окончательно получим:
![]()
Единица измерения передаточной функции должна быть равна отношению единиц измерения выходной и входной величин Х = Ф(р)Uз следовательно Ф(р):[В/м]
Проверим правильность проведения выкладок при получении передаточной функции:
![]()
![]()
![]()
![]()
отсюда, ![]()
Следовательно,![]()
![]() Проверим коэффициент К:
Проверим коэффициент К:
![]()
![]() .
.
Итак, главный оператор имеет размерность В/м, что полностью совпадает с его физическим смыслом.
2. Определение сквозной передаточной функции САР по взвешенному сигнальному графу с помощью преобразования структурных схем (см.Рисунки12-19)
Главным (основным) возмущающим воздействием данной САР является напряжение сети UC. Определим эту передаточную функцию, используя правила преобразования структурных схем.
Для этого
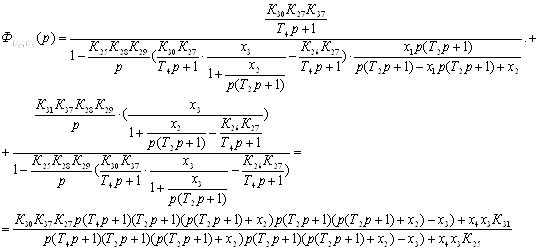
Для того, чтобы перейти к стандартной форме записи передаточной функции, раскроем скобки в знаменателе и в числители и введем обозначения:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
где 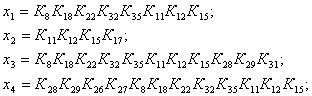
Искомая сквозная передаточная функция принимает следующий стандартный вид:
![]()
Проверим правильность проведения выкладок при получении передаточной функции:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Единицы измерения коэффициентов:
![]() Проверим коэффициент К:
Проверим коэффициент К:
![]()
Сквозная передаточная функция безразмерна, что полностью совпадает с ее физическим смыслом:
![]()
3. Определение контурной передаточной функции
Для определения контурной передаточной функции САР температуры печи, разорвем в любом месте основной контур системы, образованный главной связью. Если положить равными нулю отклонения сигналов на всех входах линейной модели САР от их номинальных значений, то зависимость во времени отклонения Uд дуги от отклонения входного напряжения Uз’ относительно их общего номинального значения Uз0 будет определяться некоторым дифференциальным уравнением:
![]()
Это и есть контурное дифференциальное уравнение. Передаточная функция, соответствующая этому уравнению, называется контурной передаточной функцией, взятая со знаком минус.
Используя правила преобразования структурных схем (см. Рисунки 20-23) имеем:
![]()
![]()
![]()
Введя обозначения, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
где ![]()
![]()
Проверим правильность проведения выкладок при получении передаточной функции:
![]()
![]()
![]()
![]()
Единицы измерения коэффициентов:
Итак, получили контурную передаточную функцию W(p).
Заключение
В данной курсовой работе исследовалась система автоматического регулирования напряжения сварочной дуги. Была построена математическая модель системы, которая с определенной точностью отражает процессы, протекающие в системе. В работе составлен сигнальный граф САР, по которому составлена система дифференциальных уравнений. Так как некоторые из этих уравнений нелинейны, поэтому они были линеаризованы. Для упрощения расчётов система была записана в оперативной форме, а также построены изображения математической модели в виде взвешенного сигнального графа и структурной схемы. По структурной схеме с помощью специальных правил преобразования её элементов была построена сквозная передаточная функция от заданного входа к заданному выходу. Проверка размерности передаточной функции показала, что расчёт был проведён верно.
Список использованной литературы
1. Моттль В.В. Теоретические основы кибернетики. – Тула, 1982.
2. Сапожников Р.А. Основы теоретической кибернетики. – М., Высшая школа,1970.
3. Воронов А.А. Основы теории автоматического управления. – М., Энергия, 1980.
4. Ципкин Я.З. Основы теории автоматических систем. – М., Наука, 1977.
5. Фельдбаум А.А. Электрические системы автоматического регулирования. – М., 1957.