
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Электропривод литейного крана по схеме "Преобразователь частоты – асинхронный короткозамкнутый двигатель"
Курсовая работа: Электропривод литейного крана по схеме "Преобразователь частоты – асинхронный короткозамкнутый двигатель"
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМ. Р.Е. АЛЕКСЕЕВА
Кафедра Электропривод и автоматизация промышленных установок
Курсовой проект
Электропривод литейного крана по схеме «Преобразователь частоты – Асинхронный короткозамкнутый двигатель»
РУКОВОДИТЕЛЬ
Филатов И.Н.
СТУДЕНТ
Марфин В.В.
Нижний Новгород 2010
Задание № 13
ЭЛЕКТРОПРИВОД ЛИТЕЙНОГО КРАНА ПО СХЕМЕ “ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ – АСИНХРОННЫЙ КОРОТКОЗАМКНУТЫЙ ЭЛЕКТРОДВИГАТЕЛЬ”
1. Исходные данные
Параметры нагрузочных диаграмм и данные исполнительного механизма
|
Исходные данные |
5 |
| Тип крана | КЛ-75/19,1 |
| Грузоподъёмность (кН), Fн | 191 |
| Вес ковша (кН), Fк | 39 |
| Минимальная скорость подъёма/спуска (м/с), vmin | 0,04 |
| Максимальная скорость подъёма/спуска (м/с), vmax | 0,16 |
| Количество ступеней регулирования | 4 |
|
КПД редуктора (%), |
78 |
| Передаточное число редуктора, iр | 168 |
| Диаметр барабана (м), Dб | 0,36 |
| Высота подъёма (м), Hп | 15 |
| Допустимое ускорение (м/с2), aдоп | 0,8 |
| Момент инерции барабана (кгм2), Jб | 233 |
Питающая сеть переменного тока ~3-TN-S, 380 В, 50 Гц.
2. Расчетная часть
2.1 Определить приведенные значения статических моментов и момента инерции исполнительного механизма.
2.2 Определить предварительно мощность двигателя и выбрать его по каталогу.
2.3 Произвести расчёт и выбор элементов силовой цепи электропривода.
2.4 Рассчитать и построить естественную механическую характеристику электродвигателя.
2.5 Рассчитать и построить механические характеристики при максимальном, среднем и минимальном значениях скорости движения.
2.6 Рассчитать и построить механические характеристики при рекуперативном торможении.
2.7 Оценить необходимость применения обратной связи для стабилизации угловой скорости вала электродвигателя (изменение скорости не должно превышать ±15% при изменении момента сопротивления на валу в пределах номинального момента электродвигателя). При необходимости рассчитать требуемый коэффициент усиления обратной связи,
2.8 Рассчитать и построить кривые изменения угловой скорости, момента и тока при пуске и остановке электродвигателя; определить длительность переходных процессов.
2.9 Проверить предварительно выбранный двигатель по нагреву и перегрузке.
2.10 Определить КПД электропривода за цикл работы.
2.11 Разработать принципиальную электрическую схему электропривода и дать описание её работы. Схема управления должна обеспечивать автоматическое выполнение заданного режима работы, ручное регулирование скорости вращения, необходимые виды защиты электрооборудования.
2.12 Выбрать аппаратуру управления, защиты и сигнализации. Составить перечень элементов
3. Графическая часть
3.1 Принципиальная электрическая схема электропривода.
3.2 Электромеханические и механические характеристики двигателя.
3.3 Нагрузочная диаграмма исполнительного механизма.
3.4 Нагрузочная диаграмма и тахограмма электропривода за полный цикл работы.
СОДЕРЖАНИЕ
Введение
1. Определение приведенных значений статических моментов и момента инерции исполнительного механизма
2. Определение предварительной мощности двигателя и выбор его по каталогу
3. Расчёт и выбор элементов силовой цепи электропривода
4. Расчёт и построение естественной механической характеристики электродвигателя
5. Расчёт и построение механических характеристик при максимальном, среднем и минимальном значениях скорости движения
6. Расчёт и построение механической характеристики при рекуперативном торможении
7. Оценка необходимости применения обратной связи для стабилизации угловой скорости вала электродвигателя
8. Расчёт и построение кривых изменения угловой скорости, момента и тока при пуске и остановке электродвигателя; определение длительности переходных процессов
9. Проверка предварительно выбранного двигателя по нагреву и перегрузке
10. Определение кпд электропривода за цикл работы
11. Разработка принципиальной электрической схемы электропривода, описание её работы
12. Выбор аппаратуры управления, защиты и сигнализации, составление перечня элементов
13 Список литературы
ВВЕДЕНИЕ
Широкое внедрение комплексной механизации и автоматизации производственных процессов, неуклонное сокращение во всех отраслях численности работников, занятых ручным трудом, особенно на вспомогательных и подсобных работах, являются одной из важнейших задач народного хозяйства. Крановое оборудование при этом представляет собой одно из основных средств сокращения тяжелого физического труда.
Подавляющее большинство грузоподъёмных машин, изготовляемых отечественной промышленностью, имеет электрический привод механизмов, и поэтому эффективность действия и производительность этих машин в значительной степени зависят от качественных показателей используемого кранового электрооборудования. Современный крановый электропривод за последнее время претерпел существенное применение в структуре и применяемых системах управления.
Большинство грузоподъёмных кранов характеризуются постоянно меняющимися условиями использования при переработки грузов, и поэтому механизмы кранов, имеющие в своём составе электроприводы, должны быть в максимальной степени приспособлены к постоянно видоизменяющейся работе с грузами, разнообразными по массе, размерам, форме, и в условиях производственных помещений или на открытых грузовых площадках.
Для наиболее массовых кранов общего назначения начинают широко применяться электроприводы на основе короткозамкнутых двигателей, значительная часть кранов изготовляется с управлением с пола, а быстроходные краны для тяжелых режимов работы комплектуются различными тиристорными системами, обеспечивающими глубокое регулирование скорости, плавности пуска и торможения при постоянно повышающихся требованиях к экономии энергоресурсов.
1. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ ЗНАЧЕНИЙ СТАТИЧЕСКИХ МОМЕНТОВ И МОМЕНТА ИНЕРЦИИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
Определение приведённых значений статического момента при различных режимах работы.
Приведённый статический момент при подъёме груза:
![]() .
.
Приведённый статический момент при спуске груза:
![]() .
.
Приведённый статический момент при подъёме ковша:
![]() .
.
Приведённый статический момент при спуске ковша:
![]() .
.
Определение приведённого значения момента инерции исполнительного механизма.
Приведённый момент инерции исполнительного механизма при заполненном ковше:
![]()
Приведённый момент инерции исполнительного механизма при пустом ковше:
![]()
2. ОПРЕДЕЛЕНИЕ ПРЕДВАРИТЕЛЬНОЙ МОЩНОСТИ ДВИГАТЕЛЯ И ВЫБОР ЕГО ПО КАТАЛОГУ
Определим сначала максимальную скорость электродвигателя и минимальное время подъёма/спуска груза.
Максимальная частота вращения двигателя:
![]() .
.
Максимальная скорость вращения двигателя:
![]() .
.
Минимальное время подъёма/спуска груза:
![]() .
.
Следующий шаг – определение приведённого эквивалентного момента двигателя, расчётной мощности двигателя и выбора его из каталога.
Так
как нагрузочная диаграмма исполнительного механизма предварительно не задана,
но известен режим, в котором работает двигатель, то продолжительность включения
можно задать равной стандартному значению: ![]() .
.
Время цикла работы двигателя будет равно:
![]() ;
;
где ![]() - время простоя двигателя.
- время простоя двигателя.
Тогда
время цикла равно: ![]() .
.
Приведённый эквивалентный момент двигателя:

Расчётная мощность двигателя:
![]() .
.
Учтём особенности данного типа привода [8, с.13] и продолжительность включения:
Кран литейный металлургический.
Группа режима работы крана – 7К.
Тип механизма – главный подъёмный.
Режим работы – 5М.
![]()
Исходя из этого расчётная мощность двигателя:
![]() .
.
Для повторно-кратковременного режима выбираем двигатель серии 4АС. Ближайшие подходящие двигатели: 4АС132М4У3, 4АС160S4У3, 4АС160М4У3, 4АС180S4У3, 4АС180М4У3, 4АС200М4У3. Произведём тепловую и перегрузочную проверку.
1. 4АС132М4У3
Номинальная
мощность двигателя: ![]() .
.
Номинальное
скольжение: ![]() .
.
Синхронная
частота вращения: ![]()
Номинальная
частота вращения: ![]()
Номинальный
момент: ![]() .
.
![]() - двигатель не проходит тепловую проверку.
- двигатель не проходит тепловую проверку.
2. 4АС160S4У3
Номинальная
мощность двигателя: ![]() .
.
Номинальное
скольжение: ![]() .
.
Синхронная
частота вращения: ![]()
Номинальная
частота вращения: ![]()
Номинальный
момент: ![]() .
.
![]() - двигатель не проходит тепловую проверку.
- двигатель не проходит тепловую проверку.
3. 4АС160М4У3
Номинальная
мощность двигателя: ![]() .
.
Номинальное
скольжение: ![]() .
.
Синхронная
частота вращения: ![]()
Номинальная
частота вращения: ![]()
Номинальный
момент: ![]() .
.
![]() - двигатель проходит тепловую проверку.
- двигатель проходит тепловую проверку.
Критический
момент ![]() .
.
Максимальный
статический момент ![]() .
.
![]() - двигатель не проходит проверку по перегрузочной
способности.
- двигатель не проходит проверку по перегрузочной
способности.
4. 4АС180S4У3
Номинальная
мощность двигателя: ![]() .
.
Номинальное
скольжение: ![]() .
.
Синхронная
частота вращения: ![]()
Номинальная
частота вращения: ![]()
Номинальный
момент: ![]() .
.
![]() - двигатель проходит тепловую проверку.
- двигатель проходит тепловую проверку.
Критический
момент ![]() .
.
Максимальный
статический момент ![]() .
.
![]() - двигатель не проходит проверку по перегрузочной способности.
- двигатель не проходит проверку по перегрузочной способности.
5. 4АС180М4У3
Номинальная
мощность двигателя: ![]() .
.
Номинальное
скольжение: ![]() .
.
Синхронная
частота вращения: ![]()
Номинальная
частота вращения: ![]()
Номинальный
момент: ![]() .
.
![]() - двигатель проходит тепловую проверку.
- двигатель проходит тепловую проверку.
Критический
момент ![]() .
.
Максимальный
статический момент ![]() .
.
![]() - двигатель не проходит проверку по перегрузочной
способности.
- двигатель не проходит проверку по перегрузочной
способности.
6. 4АС200М4У3
Номинальная
мощность двигателя: ![]() .
.
Номинальное
скольжение: ![]() .
.
Синхронная
частота вращения: ![]()
Номинальная
частота вращения: ![]()
Номинальный
момент: ![]() .
.
![]() - двигатель проходит тепловую проверку.
- двигатель проходит тепловую проверку.
Критический
момент ![]() .
.
Максимальный
статический момент ![]() .
.
![]() - двигатель проходит проверку по перегрузочной
способности.
- двигатель проходит проверку по перегрузочной
способности.
Таким образом, выбираем двигатель 4АС200М4У3.
Необходимо перечислить основные параметры данного двигателя: [6]
Фазное
напряжение питающей сети: ![]() .
.
Линейное
напряжение питающей сети: ![]() .
.
Частота
питающей сети: ![]() .
.
Номинальная
мощность двигателя: ![]() .
.
Синхронная
скорость: ![]() .
.
Синхронная
частота вращения: ![]() .
.
Номинальное
скольжение: ![]() .
.
Номинальная частота вращения:
![]() .
.
Номинальный момент:
![]() .
.
Параметры схемы замещения:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Пусковые параметры.
Пусковой
момент: ![]() .
.
Минимальный
момент: ![]() .
.
Критический
момент: ![]() .
.
Номинальное
скольжение: ![]() .
.
Критическое
скольжение: ![]() .
.
Пусковой
ток: ![]() .
.
Момент
инерции ротора двигателя: ![]() .
.
Номинальный
КПД: ![]() .
.
Номинальный
cos: ![]() .
.
Номинальный ток статора:
![]() .
.
3. РАСЧЁТ И ВЫБОР ЭЛЕМЕНТОВ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОПРИВОДА
Преобразователь частоты:
Марка - HYUNDAI N300,
Модель – 370 HF .
Параметры преобразователя:
Мощность
двигателя - ![]() ,
,
Номинальный
ток - ![]() ,
,
Номинальное
напряжение - ![]() ,
,
Номинальная
частота - ![]() ,
,
Диапазон
- ![]() . Автоматический
выключатель:
. Автоматический
выключатель:
Расцепитель автоматического выключателя рассчитывается на номинальный ток преобразователя, который примерно равен номинальному току двигателя. Так как пуск происходит при пониженном напряжении и частоте, нет необходимости учитывать пусковой ток двигателя. [12]
Выключатель: АЕ 2063ММ.
Номинальный
ток расцепителя ![]() .
.
4. РАСЧЁТ И ПОСТРОЕНИЕ ЕСТЕСТВЕННОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ
Предварительно необходимо рассчитать сопротивление первичной обмотки и сопротивление вторичной обмотки, приведённое к числу витков вторичной.
![]()
![]()
![]()
![]()
Диапазон
значений скольжения: ![]() .
.
Уравнение механической характеристики двигателя:

Скорость электродвигателя в функции скольжения:
![]() .
.
Результаты расчётов:
Таблица 4.1 – механическая характеристика двигателя
|
|
1 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0 |
|
|
0 | 15.7 | 31.4 | 47.1 | 62.8 | 78.5 | 94.2 | 110 | 125.7 | 141.4 | 157 |
|
|
387.6 | 416.4 | 448.4 | 483.3 | 520.2 | 555.7 | 582 | 581.4 | 518.4 | 337 | 0 |
Однако данное уравнение ошибочно описывает процессы, происходящие при пуске АД. Так, например оно не учитывает увеличение активного сопротивления фазы ротора вследствие эффекта вытеснения тока. Поэтому есть необходимость произвести расчёт механической характеристики по эмпирически выведенной формуле.
Диапазон изменения скольжения тот же, что и в предыдущих вычислениях.
Критическое скольжение:
![]() .
.
Критический момент:
![]()
Пусковой момент:
![]() .
.
Коэффициент K:
 .
.
Момент электродвигателя:
 .
.
Результаты расчётов:
Таблица 4.2 – МХ по эмпирической формуле
|
|
1 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0 |
|
|
0 | 15.7 | 31.4 | 47.1 | 62.8 | 78.5 | 94.2 | 110 | 125.7 | 141.4 | 157 |
|
|
446.6 | 464.6 | 486.5 | 512.1 | 540.5 | 568.424 | 586.9 | 575.8 | 496.6 | 302.8 | 0 |
Графики естественных механических характеристик:
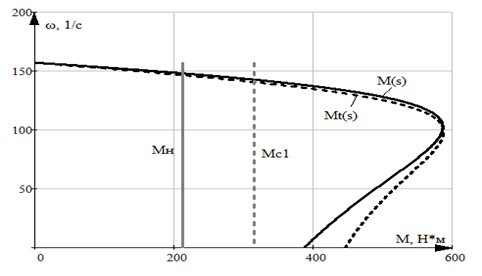
Рисунок 4.1 – Графики естественных механических характеристик
5. РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ МАКСИМАЛЬНОМ, СРЕДНЕМ И МИНИМАЛЬНОМ ЗНАЧЕНИЯХ СКОРОСТИ ДВИЖЕНИЯ
При расчёте искусственных характеристик двигателя необходимо воспользоваться условием задания:
![]() ,
,
![]() .
.
При этом частоты преобразователя, обеспечивающие работу на максимальной скорости при различных моментах, будут также различны
При частотном регулировании жесткость МХ остаётся постоянной:
![]() .
.
Подобным выражением можно воспользоваться при определении синхронной скорости вращения, соответствующей максимальной скорости при различных моментах:
Минимальный статический момент:
![]()
Максимальный статический момент:
![]()
Соответствующие данным синхронным скоростям частоты:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Сопротивление короткого замыкания:
![]() .
.
Коэффициенты
![]() и
и ![]() :
:
![]() ,
, ![]() .
.
Относительная частота:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]()
Относительное напряжение на статоре:
Минимальный статический момент:

 .
.
Максимальный статический момент:
При увеличении частоты вверх от номинала необходимо также увеличить и напряжение на статоре, но это не допустимо. Значит, относительное напряжение будет равно 1:
![]() .
.
Это приведёт к снижению момента. В таком случае работа двигателя будет возможна при выполнении условия:
![]() .
.
Напряжение на выходе преобразователя:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Критическое скольжение:
Минимальный статический момент:

Максимальный статический момент:

Критический момент двигателя:
Минимальный статический момент:


Максимальный статический момент:


Проверка условия:
![]() ;
;
![]() .
.
Как видно, условие выполняется.
Коэффициент a:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Момент рассчитываем по формуле Клосса:
Минимальный статический момент:
 .
.
Максимальный статический момент:
 .
.
Скорость электродвигателя:
Минимальный статический момент:
![]()
Минимальный статический момент:
![]() .
.
Результаты расчётов:
Таблица 5.1 – расчёт ИХ при максимальной частоте при минимальном моменте
|
|
0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
|
150.7 | 135.6 | 120.6 | 105.5 | 90.42 | 75.35 | 60.28 | 45.21 | 30.14 | 15.07 | 0 |
|
|
0 | 327.4 | 509.5 | 578 | 584.1 | 561.9 | 529.1 | 493.8 | 459.6 | 428 | 399.327 |
Таблица 5.2 – расчёт ИХ при максимальной частоте при максимальном моменте
|
|
0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
|
162.6 | 146.4 | 130.1 | 113.8 | 97.58 | 81.32 | 65.05 | 48.79 | 32.53 | 16.26 | 0 |
|
|
0 | 323.7 | 493.2 | 547.7 | 543.9 | 516.1 | 480.9 | 445.3 | 411.9 | 381.7 | 354.8 |
Аналогичными будут расчёты при построении МХ при минимальной частоте.
Синхронная частота вращения при различных моментах:
Минимальный статический момент:
![]()
Максимальный статический момент:
![]()
Соответствующие данным синхронным скоростям частоты:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Относительная частота:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]()
Относительное напряжение на статоре:
Минимальный статический момент:

 .
.
Максимальный статический момент:
![]()

Напряжение на выходе преобразователя:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Критическое скольжение:
Минимальный статический момент:

Максимальный статический момент:

Критический момент двигателя:
Минимальный статический момент:


Максимальный статический момент:


Коэффициент a:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Момент рассчитываем по формуле Клосса:
Минимальный статический момент:
 .
.
Максимальный статический момент:

Скорость электродвигателя:
Минимальный статический момент:
![]()
Минимальный статический момент:
![]() .
.
Результаты расчётов:
Таблица 5.3 – расчёт ИХ при минимальной частоте при минимальном моменте
|
|
0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
|
38.71 | 34.84 | 30.96 | 27.09 | 23.22 | 19.35 | 15.48 | 11.61 | 7.741 | 3.871 | 0 |
|
|
0 | 149.4 | 267.3 | 358.7 | 428.3 | 480.5 | 518.8 | 546.1 | 564.8 | 576.8 | 583 |
Таблица 5.4 – расчёт ИХ при минимальной частоте при максимальном моменте
|
|
0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
|
50.64 | 45.57 | 40.51 | 35.44 | 30.38 | 25.32 | 20.25 | 15.19 | 10.13 | 5.064 | 0 |
|
|
0 | 150.5 | 276.0 | 375.4 | 450.8 | 505.4 | 542.9 | 566.8 | 580.4 | 586 | 585 |
Нет необходимости делать подобный расчёт при средних частотах, так как на подобную скорость не накладывается никаких ограничений.
Синхронная частота вращения:
![]() .
.
Частота на выходе преобразователя:
![]() .
.
Относительная частота:
![]() .
.
Относительное напряжение на статоре:


Напряжение на выходе преобразователя:
![]() .
.
Критическое скольжение:
 .
.
Критический момент двигателя:


Коэффициент a:
![]() .
.
Момент рассчитываем по формуле Клосса:
 .
.
Скорость электродвигателя:
![]()
Результаты расчётов:
Таблица 5.5 – расчёт ИХ при первой средней частоте
|
|
0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
|
125.3 | 112.8 | 100.2 | 87.71 | 75.18 | 62.65 | 50.12 | 37.59 | 25.06 | 12.53 | 0 |
|
|
0 | 288.8 | 468.6 | 556.4 | 585.17 | 581.5 | 561.7 | 535.0 | 506.2 | 477.6 | 450.3 |
Синхронная частота вращения:
![]() .
.
Частота на выходе преобразователя:
![]() .
.
Относительная частота:
![]() .
.
Относительное напряжение на статоре:


Напряжение на выходе преобразователя:
![]() .
.
Критическое скольжение:
 .
.
Критический момент двигателя:


Коэффициент a:
![]() .
.
Момент рассчитываем по формуле Клосса:
 .
.
Скорость электродвигателя:
![]()
Результаты расчётов:
Таблица 5.6 – расчёт ИХ при второй средней частоте
|
|
0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
|
88 | 79.2 | 70.4 | 61.6 | 52.8 | 44 | 35.2 | 26.4 | 17.6 | 8.8 | 0 |
|
|
0 | 228.7 | 391.1 | 494.2 | 552.3 | 579.5 | 586.5 | 581.1 | 568.4 | 551.5 | 532.5 |
Построим все рассчитанные ИХ. На рисунке указаны максимальное и минимальное значение скорости, максимальный и минимальный статический момент, а также ИХ при различных частотах.
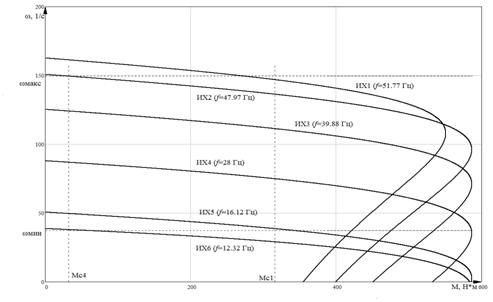
Рисунок 5.1 – Графики ИХ при различных частотах
Таким образом, при расчёте данных характеристик учитывалось ограничение задания:
![]() ,
,
![]() .
.
6. РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Задача торможения – остановить двигатель. Рекуперативное торможение – такое торможение, при котором происходит отдача энергии в сеть. Такое возможно, например, при скорости вращения ротора больше синхронной. При частотном регулировании для этого ставится второй комплект полупроводниковых приборов, которые работаю в режиме инвертора, и производится понижение частоты питающей сети. Однако окончательно торможение двигателя происходит на характеристике динамического торможения. Для этого статор двигателя отключается от сети а в 2 фазы двигателя подаётся постоянный ток.
Исходные
данные – двигатель работал с моментом ![]() со
скоростью
со
скоростью ![]() .
.
Для определения интенсивности торможения необходимо рассчитать следующее:
Допустимое ускорение:
![]() .
.
Суммарный момент инерции:
![]() .
.
Электромеханическая постоянная времени:
![]() .
.
Максимальный момент при торможении:
![]() .
.
В то же время критический момент характеристики динамического торможения:
![]() .
.
Для максимальной интенсивности критический момент должен быть равен максимальному моменту при торможении:
![]() .
.
Исходя из этого условия, эквивалентный ток динамического торможения равен:
![]() .
.
Построим характеристику динамического торможения:
 .
.
График характеристики динамического торможения. На нём указана:
-искусственная характеристика, на которой работал двигателя,
-максимальный статический момент,
-максимальный момент торможения,
-динамическая характеристика торможения.
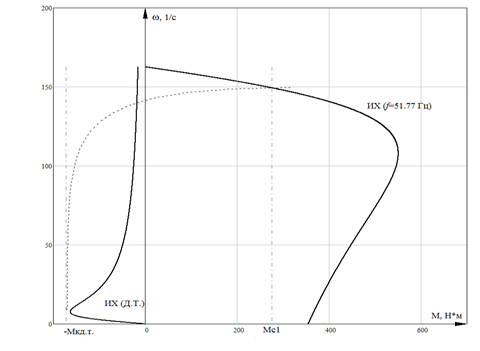
Рисунок 6.1 – Характеристика динамического торможения
7. ОЦЕНКА НЕОБХОДИМОСТИ ПРИМЕНЕНИЯ ОБРАТНОЙ СВЯЗИ ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОЙ СКОРОСТИ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ
Так
как привод оснащен частотным регулятором, то его характеристики имеют
одинаковую жесткость независимо от частоты. Поэтому можно рассмотреть одну
характеристику, например ту, на которой осуществляется подъём груза с
максимальной скоростью. В таком случае при изменении момента от ![]() до
до ![]() частота вращения двигателя
меняется от
частота вращения двигателя
меняется от ![]() до
до ![]() .
.
Абсолютное изменение скорости:
![]() .
.
Относительное изменение скорости:
![]() .
.
Видно,
что относительно изменение скорости при изменении момента от 0 до ![]() не превышает 15%. Логично
предположить, что при изменении момента от 0 до Mн<Mс1
относительное изменение скорости также не будет превышать 15%. Таким образом
можно сделать вывод, что для стабилизации скорости нет необходимости вводить
обратную связь с каким бы то ни было коэффициентом усиления.
не превышает 15%. Логично
предположить, что при изменении момента от 0 до Mн<Mс1
относительное изменение скорости также не будет превышать 15%. Таким образом
можно сделать вывод, что для стабилизации скорости нет необходимости вводить
обратную связь с каким бы то ни было коэффициентом усиления.
8. РАСЧЁТ И ПОСТРОЕНИЕ КРИВЫХ ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ, МОМЕНТА И ТОКА ПРИ ПУСКЕ И ОСТАНОВКЕ ЭЛЕКТРОДВИГАТЕЛЯ; ОПРЕДЕЛЕНИЕ ДЛИТЕЛЬНОСТИ ПЕРЕХОДНЫХ ПРОЦЕССОВ
А) Разгон двигателя.
Так как двигатель питается от преобразователя частоты, то есть возможность создать линейный закон изменения выходной величины:
![]() ,
,
где ![]() - допустимое угловое
ускорение двигателя.
- допустимое угловое
ускорение двигателя.
Чтобы рассчитать его необходимо проделать следующие вычисления:
Пусковой момент:
![]() .
.
Таким образом, допустимое угловое ускорение:
![]() .
.
Очевидно,
что выполняется условие ![]() .
.
Разгон двигателя можно разделить на 3 периода:
1.Момент увеличивается до Mc1. Скорость равна 0.
Длительность периода – время запаздывания:
![]()
Момент двигателя:
![]() .
.
Скорость
двигателя: ![]() Начальные и конечные
значения момента и скорости:
Начальные и конечные
значения момента и скорости: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
2.Второй период –
момент экспоненциально увеличивается до ![]() ,
скорость увеличивается линейно.
,
скорость увеличивается линейно.
Длительность
периода – время ![]() , где
, где ![]() - время, за которое
входной сигнал
- время, за которое
входной сигнал ![]() увеличивается до
увеличивается до
![]() .
.
![]() .
.
Момент двигателя:
![]() .
.
Скорость:
![]() .
.
Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
3.Третий период –
разгон по искусственной характеристики до установившихся значений скорости и
момента. Длительность периода - ![]() . Момент
двигателя:
. Момент
двигателя:
![]() .
.
Скорость двигателя:
![]() .
.
Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
Полное время разгона:
![]()
Б) Рекуперативное торможение.
При переводе двигателя в режим рекуперативного торможения изменится допустимое угловое ускорение:
![]()
Торможение делится на 2 периода:
1.
Момент
экспоненциально увеличивается до ![]() ,
скорость уменьшается линейно.
,
скорость уменьшается линейно.
Длительность периода:
![]() .
.
По полученным значениям построим график изменения момента и скорости при разгоне.
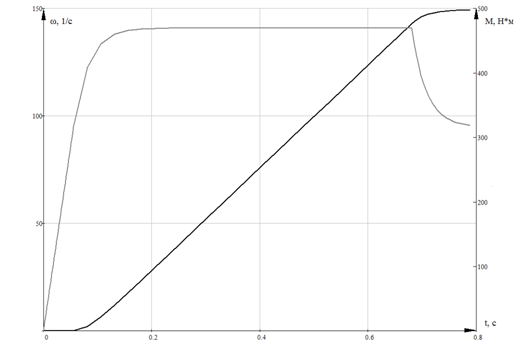
Рисунок 8.1 – График изменения момента и скорости при пуске
Момент двигателя:
![]() .
.
Скорость двигателя:

Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
2. Момент и скорость уменьшаются до 0 на характеристики динамического торможения.
Длительность
периода - ![]() .
.
Момент двигателя:
![]() .
.
Скорость двигателя:
![]() .
.
Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
Полное время торможения:
![]()
На основании расчётов построим график изменения скорости и момента при торможении.
Рассчитаем теперь переходный процесс спуска груза.
Для осуществления спуска груза предварительно меняют чередование напряжения, подаваемого в статор двигателя. Это приведёт к тому, что двигатель начнёт разгон в 3 квадранте.
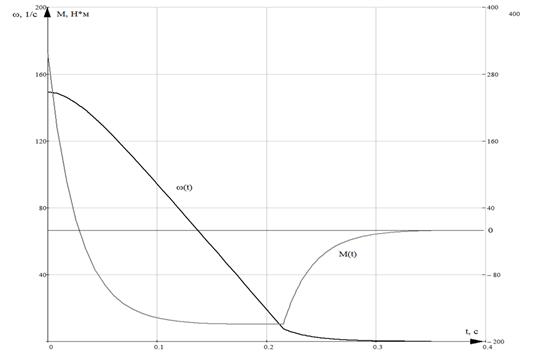
Рисунок 8.2 – График изменения момента и скорости при рекуперативном торможении
Пусковой момент:
![]() .
.
Таким образом, допустимое угловое ускорение:
![]() .
.
Условие
![]() выполняется.
выполняется.
Так
как действует условие ![]() , то синхронная
скорость в этом случае будет равна:
, то синхронная
скорость в этом случае будет равна:
![]()
Время первого этапа равно:
![]()
Разгон двигателя можно разделить на 2 периода:
1.
Первый период –
момент экспоненциально увеличивается до ![]() ,
скорость увеличивается линейно.
,
скорость увеличивается линейно.
Время первого этапа равно:
![]()
Момент двигателя:
![]() .
.
Скорость:
![]() .
.
Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
2.
Второй период –
разгон по искусственной характеристики до установившихся значений скорости выше
синхронной и момента. Длительность периода - ![]() .
.
Момент двигателя:
![]() .
.
Скорость двигателя:
![]() .
.
Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
Полное
время разгона: ![]()
По полученным значениям построим график изменения момента и скорости при разгоне.
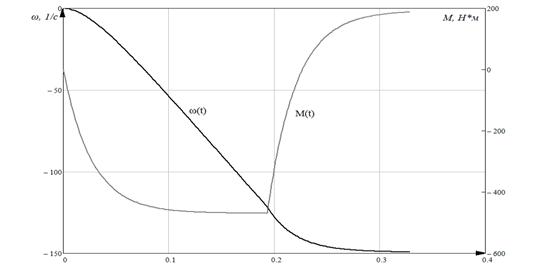
Рисунок 8.3 – График изменения момента и скорости при пуске (режим спуска груза)
Б) Рекуперативное торможение.
При переводе двигателя в режим рекуперативного торможения изменится допустимое угловое ускорение:
![]()
![]() .
.
Выполняется
условие ![]() .
.
Торможение делится на 2 периода:
1.
Момент
экспоненциально увеличивается до ![]() ,
скорость уменьшается линейно.
,
скорость уменьшается линейно.
Длительность периода:
![]() .
.
Момент двигателя:
![]() .
.
Скорость двигателя:

Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
,![]() ,
, ![]() .
.
2. Момент и скорость уменьшаются до 0 на характеристики динамического торможения.
Длительность
периода - ![]() .
.
Момент двигателя:
![]() .
.
Скорость двигателя:
![]() .
.
Начальные
и конечные значения скорости и момента: ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
Полное время торможения:
![]() .
.
На основании расчётов построим график изменения скорости и момента при торможении.
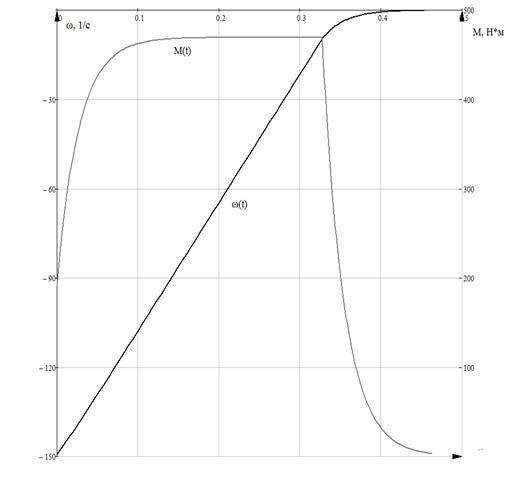
Рисунок 8.4 – График изменения момента и скорости при рекуперативном торможении (режим спуска груза)
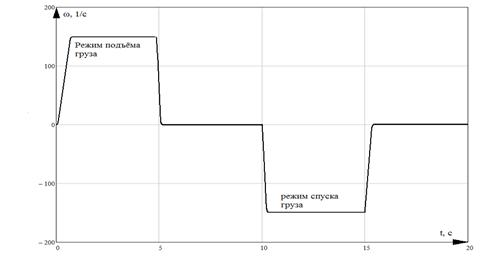 После расчёта переходного процесса
можно построить тахограмму и нагрузочную диаграмму двигателя.
После расчёта переходного процесса
можно построить тахограмму и нагрузочную диаграмму двигателя.
Рисунок 8.5 – Тахограмма двигателя
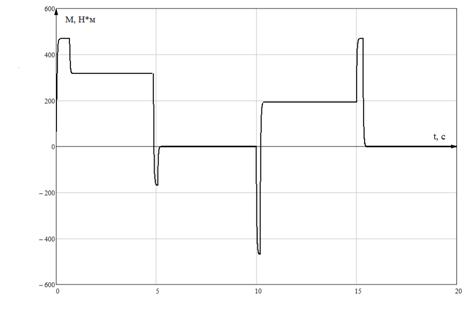
Рисунок 8.6 – Нагрузочная диаграмма двигателя
9. ПРОВЕРКА ПРЕДВАРИТЕЛЬНО ВЫБРАННОГО ДВИГАТЕЛЯ ПО НАГРЕВУ И ПЕРЕГРУЗКЕ
Для проверки двигателя по нагреву воспользуемся методом эквивалентного нагрева:
Эквивалентный приведённый момент двигателя:

Номинальный момент двигателя:
![]()
Соотношение
![]() соблюдается,
следовательно, перегрева двигателя выше допустимого значения не происходит.
соблюдается,
следовательно, перегрева двигателя выше допустимого значения не происходит.
Для проверки двигателя на перегрузочную способность воспользуемся следующим соотношением:
![]() .
.
Максимальный статический момент:
![]() .
.
Критический момент:
![]() .
.
Критический момент при снижении на 10% напряжения:
![]() .
.
Таким образом, видно, что соотношение выполняется. Это значит, что при максимальном статическом моменте на валу перегрузочная способность сохранится даже при снижении напряжения на 10%.
10. ОПРЕДЕЛЕНИЕ КПД ЭЛЕКТРОПРИВОДА ЗА ЦИКЛ РАБОТЫ
КПД электропривода можно рассчитать по формуле:
![]() ,
,
где ![]() - кпд двигателя за период
работы,
- кпд двигателя за период
работы,
![]() - кпд редуктора за период работы,
- кпд редуктора за период работы,
![]() - кпд преобразователя.
- кпд преобразователя.
Для определения кпд двигателя за период работы необходимо рассчитать следующие величины:
Номинальные полные потери в двигателе:
![]() .
.
Номинальные переменные потери в двигателе:
![]() .
.
Номинальные постоянные потери в двигателе:
![]() .
.
Переменные потери в двигателе при различных моментах на валу двигателя:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Кпд двигателя за цикл работы:
![]()
![]()
![]() .
.
Тогда кпд привода за цикл работы:
![]() .
.
11. РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ
Принципиальная электрическая схема электропривода приведена в графической части
Описание схемы
Схема представляет собой систему управления привода по схеме «Тиристорный преобразователь частоты – Асинхронный двигатель с короткозамкнутым ротором». Преобразователь частоты питается от сети напряжением 380 В. Схема управления питается от напряжения в 220 В через понижающий трансформатор и выпрямительный диодный мост.
Ручное управление пуском и торможением.
Для пуска двигателя первоначально включаются автоматы QF1 и QF2, подключающие к сети силовую часть и схему управления. Для пуска в прямом направлении (режим подъёма груза) необходимо нажать кнопку SB1. Она подключит к сети контактор KM1 (о чём будет свидетельствовать загоревшаяся лампа HL1). Этот контактор замкнёт свои контакты к силовой цепи, подключив статор к сети, также подключит СИФУ выпрямительной и инверторной группы выпрямителя к сети. Также KM1 замкнёт свои контакты в цепи контактора КМ3, который в свою очередь разомкнёт свои контакты в цепи электромагнитного тормоза, что приведёт к растормаживанию двигателя. Начнётся процесс разгона двигателя и выход на необходимую характеристику. Также осуществится электрическая блокировка цепи обратного пуска (режим спуска груза). Торможение осуществляется путём понижения частоты на выходе преобразователя. При этом работаю вентили инверторной группы. Для окончательного останова необходимо нажать кнопку SB3, что приведет к подаче напряжения на контактор KM4, который разомкнёт свои контакты в питающей статор сети, и замкнёт контакты в сети источника постоянного тока. Начнётся процесс динамического торможения. Также контакты КМ4 замкнут цепь реле времени КТ1, которое после истечения уставки, разомкнёт свои контакты в цепи управления, что приведёт к её отключению, снятию напряжения с контактора КМ1 и включению электромагнитного тормоза.
Процессы при обратном пуске (режим спуска груза) аналогичны вышеописанным, за исключением того, что первоначально замыкаются контакты КМ2.
Автоматическое управление осуществляется путевыми выключателями SQ1,2. При нажатии кнопки SB3, подключается контактор КМ1, и процессы аналогичны рассмотренным ранее. При достижении двигателем необходимой высоты сработает конечный выключатель SQ1, который подключит контактор КМ4, и дальнейшие процессы буду аналогичны ранее рассмотренным.
В схеме предусмотрен ряд защит. Максимально токовая защита силовой цепи и цепи управления обеспечивается с помощью автоматических выключателей QF1, QF2, а также с помощью плавких предохранителей FU1, FU2. Путевая защита осуществляется с помощью конечных выключателей SQ1 и SQ2. В схеме присутствует электрическая блокировка реверсивных контакторов KM1 и KM2, исключающая их одновременное включение.
Тиристорный преобразователь предусматривает следующие виды защит и режимы коррекции:
-защита от короткого замыкания на корпус
-максимально-токовая защита;
-защита от обрыва фаз, перекоса фаз;
-защита от понижения или повышения напряжения в звене постоянного тока;
-защита от неправильной работы входного тиристорного выпрямителя;
-тепловая защита;
-защита от потери питания контроллером.
-коррекция выходного напряжения в зависимости от напряжения питающей сети;
-коррекция интенсивности (при разгоне) и рабочей частоты (в установившемся режиме) при превышении допустимого тока;
-коррекция интенсивности торможения при превышении напряжения на звене постоянного тока.
Внешние опции тиристорного преобразователя:
-возможность подключения внешнего тормозного блока для приёма энергии торможения;
-возможность управления внешним механическим тормозом;
-подключение внешнего датчика температуры двигателя.
12. ВЫБОР АППАРАТУРЫ УПРАВЛЕНИЯ, ЗАЩИТЫ И СИГНАЛИЗАЦИИ, СОСТАВЛЕНИЕ ПЕРЕЧНЯ ЭЛЕМЕНТОВ
Выбор автоматических выключателей QF [12]
Для силовой цепи выбор был произведён в пункте 3
Для цепи с трансформатором выбираем двухфазный автоматический выключатель QF2 типа ВА 61-29Н с электромагнитным расцепителем на переменное напряжение 220 В, номинальный ток 8 А.
Выбор трансформатора TV
Выбираем трансформатор ОСЗР-0.040-83-УХЛ4. Номинальное напряжение первичной обмотки: 220В, номинальное напряжение вторичной обмотки: 24В;
Выбор диодов VD1-VD4 [13]
Выбор диодов производится по величине обратного напряжения и максимального значения среднего тока. Обратное напряжение, приложенное к диоду, должно быть больше 1.44 U2ф, где U2ф=24 В. Максимальный средний допустимый ток должен быть больше тока схемы управления. Так как ток в схеме управления не превышает 8 А, то выбираем диод Д 104-10-3-УХЛ4. Максимальный средний допустимый ток диода I =10 А.
Выбор кнопочных выключателей SB [10]
Кнопки выбираем по напряжению и току. Выбираем кнопки серии ВК43, рассчитанные на ток 10А.
Кнопочный выключатель SB1 серии ВК43-21-01110-54 УХЛ2, Uном = 220В. Число контактов: 1 замыкающий.
Кнопочный выключатель SB2 серии ВК43-21-01110-54 УХЛ2, Uном = 220В. Число контактов: 1 замыкающий.
Выключатели кнопочные SB3-SB5 серии ВК43-21-10110-54 УХЛ2, Uном = 24В.
Выбор контакторов KM [10]
Контактор КM1 типа КМ2000 с одним замыкающим контактом. Номинальный ток контактов 100А, катушка контактора на постоянное напряжение 220 В.
Контактор КM2 типа КТ6000/2 с одним размыкающим контактом. Номинальный ток контакта 630 А, катушка контактора на постоянное напряжение 220 В.
Выбор реле времени KT [10]
Выбираем реле времени КТ типа РСВ15-1-46131-0УХЛ-4 с одним замыкающим и одним размыкающим контактом. Диапазон регулирования уставки 1-10 мин. Катушка реле на постоянное напряжение 220 В.
Выбор плавких предохранителей FU [13]
Предохранители ставятся в цепь управления, где отсутствуют большие скачки тока. Поэтому выбираем номинальный ток плавкой вставки предохранителя в 2 раза превосходящий ток цепи.
Выбираем предохранители ПП57 – 3127 с номинальным током плавкой вставки 25 А и номинальным напряжением переменного тока 220 В.
Выбор сигнальных ламп HL
Выбираем сигнальную лампу HL типа АС 12015 У2 ТУ 16-535.930-76 на напряжение 24 В.
13. СПИСОК ЛИТЕРАТУРЫ
1. Булгаков, А.А. Частотное управление асинхронными двигателями./ А.А. Булгаков. – 3-е перераб. изд. – М.: Энергоиздат, 1982. – 216 с.: ил.
2. Ключев, В.И. Теория электропривода: Учебник для вузов / В.И. Ключев. – M.: Энергоиздат, 1985. – 560 с.: ил.
3. Ключев, В.И. Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов / В.И. Ключев, В.М. Терехов. – М.: Энергия, 1980. – 360 с.: ил
4. Чиликин, М.Г. Общий курс электропривода: Учебник для вузов / М.Г. Чиликин, А.С. Сандлер. – 6-е изд., доп. и перераб. – М.: Энергоиздат, 1981. – 576 с.: ил.
5. Чиликин, М.Г. Основы автоматизированного электропривода: Учеб. пособие для вузов / М.Г. Чиликин, М.М. Соколов, В.М. Терехов, А.В. Шинянский. – М.: Энергия, 1974. – 568 с.: ил.
6. Кравчик, А.Э. Асинхронные двигатели серии 4А: Справочник / А. Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская. – М.: Энергоиздат, 1982. – 504 с.: ил.
7. Онищенко, Г.Б. Автоматизированный электропривод промышленных установок: Учеб. пособие для студентов вузов / Под общ. ред. Г.Б. Онищенко. – М.: РАСХН, 2001. – 520 с.: ил.
8. Яуре, А.Г. Крановый электропривод: Справочник / А.Г. Яуре, Е.М. Певзнер. – М.: Энергоатомиздат, 1988. – 344 с.: ил.
9. Стандарт промышленного предприятия. Проекты дипломные и курсовые. Общие требования к оформлению пояснительных записок и чертежей. СТП 1-У-НГТУ-2004/ НГТУ: Н.Новгород, 2004.
10. Реле управления и защиты /Н.В.Возняк. М., Информэлектро, 1998.
11. Аппараты защиты. т.1, ч.1. Предохранителя низкого и высокого напряжения. Справочник. М., Информэлектро 1999.
12. Автоматические выключатели общего применения до 630 А. Справочник. М., Информэлектро, 1996, 184с.: с илл. табл.
13. Силовые полупроводниковые приборы: Справочник /О.Г.Чебовский Л.Г.Моисеев, Р.П.Недошивин -2-е изд., перераб. и доп. -М., Энергоатомиздат, 1985. -400с.,илл.
Спецификация
| Поз. обозн. | Наименование | Кол. | Примечание |
| Двигатель | |||
| М | 4АС200М4У3 | 1 | |
| Трансформатор понижающий | |||
| TV | ОСЗР-0.040-83-УХЛ4 | 1 | U1=220 В U2=24 В |
| Тиристорный преобразователь | |||
| ТПЧ | HYUNDAI N300 | 1 | UН=380В IН=75А |
| Автоматические выключатели | |||
| QF1 | АЕ2063ММ | 1 | 380В, 53А |
| QF2 | ВА61-29Н | 1 | 220В, 8А |
| Контакторы | |||
| КМ1 | КТ6000/2, 2з | 1 | UН=220В IН=630А |
| КМ2-KM3 | КМ2000, 3з+1р | 2 | UН=220В IН=100А |
| Реле времени | |||
| КТ1 | РСВ15-1-46131-40УХЛ-4, 1з+1р | 1 | 1-10 мин |
| Выключатели кнопочные | |||
| SB1-SB2 | ВК43-21-01110-54УХЛ2, 1з+1р | 2 | IНMAX=10А |
| SB3-SB5 | ВК43-21-10110-54УХЛ2, 2з+2р | 3 | IНMAX=10А |
| Конечные выключатели | |||
| SQ1-SQ2 | КУ703А | 2 | |
| Диоды | |||
| VD1-VD4 | Д104-10-3-УХЛ4 | 4 | IF=10 A |
| Предохранители | |||
| FU1-FU3 | ПП57-3127 | 3 | IН=25А |
| Потенциометр | |||
| RP1 | ППБ-1А-10Вт-1кОм±10% | 1 | |
| Лампы | |||
| HL1-HL2 | АС 12015 У2 ТУ 16-535.930-76 24В | 2 | Красный |