
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Учебное пособие: Теория автоматического управления
Учебное пособие: Теория автоматического управления
Министерство образования Российской Федерации
Ивановский государственный энергетический университет
кафедра АУЭС
Методические указания
к выполнению курсовой работы по дисциплине
“Теория автоматического управления”
(для студентов спец. 210400)
Иваново 2000
Составитель В.Ф. КОРОТКОВ
Редактировал А.А. ФОМИЧЕВ
Методические указания предназначены для студентов специальности 210400 "Автоматическое управление электроэнергетическими системами".
Утверждены цикловой методической комиссией ЭЭФ.
РЕЦЕНЗЕНТ
кафедра автоматического управления электроэнергетическими системами Ивановского государственного энергетического университета
СОДЕРЖАНИЕ
1. ЦЕЛИ И ЗАДАЧИ
2. ОБЩИЕ ЗАМЕЧАНИЯ
3. СТРУКТУРНАЯ СХЕМА САУ
4. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
5. ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
6. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ
7. ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПО РАСПОЛОЖЕНИЮ НУЛЕЙ И ПОЛЮСОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ В КОМПЛЕКСНОЙ ПЛОСКОСТИ
8. ОБЛАСТЬ УСТОЙЧИВОСТИ
9. ЗАПАС УСТОЙЧИВОСТИ
10. ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАБОТЫ
ЛИТЕРАТУРА
ПРИЛОЖЕНИЕ
1. ЦЕЛИ И ЗАДАЧИ
Целью курсовой работы является закрепление и обобщение знаний, полученных студентами специальности 210400 при изучении дисциплины “Теория автоматического управления”, приобретение умений и навыков в использовании этих знаний при самостоятельном решении практических задач.
Задачи:
- обеспечить связь общей теории автоматического управления с конкретными проблемами автоматического управления в электроэнергетических системах;
- продемонстрировать влияние значений параметров на динамические и частотные свойства системы автоматического управления (САУ), а также на её устойчивость ;
- обеспечить получение умений и навыков в исследовании основных характеристик и показателей качества САУ.
2. ОБЩИЕ ЗАМЕЧАНИЯ
Объектом исследований в курсовой работе является фрагменты реальных САУ, используемых в электроэнергетике. Параметры САУ, задаваемых в качестве исходных данных, также близки к реальным и их различия в отдельных вариантах заданий определяется в основном необходимостью получения определенного числа вариантов.
Задания (см. Приложение) к курсовой работе в общем случае предполагают необходимость выполнения следующих работ:
- составление и преобразование структурной схемы замкнутой САУ и получение эквивалентной передаточной функции;
- обеспечение заданных статических характеристик САУ, в частности, заданного значения коэффициента статизма;
- исследование переходной характеристики САУ при заданном воздействии на входе и оценка динамических свойств (перерегулирование, время переходного процесса и др.);
- оценка частотных свойств САУ на основе частотных характеристик;
- расчёт и построение области устойчивости САУ в пространстве заданных параметров;
- определение запаса устойчивости САУ по модулю и по фазе.
При расчёте характеристик САУ предполагается возможность использования компьютерных программ “Classic” (переходные и частотные характеристики) и “Расчёт областей устойчивости”.
3. СТРУКТУРНАЯ СХЕМА САУ
Структурная схема САУ составляется с учётом заданных передаточных функций элементов САУ и их параметров. Она изображается в виде связанных между собой звеньев, с указанием их передаточных функций, точек приложения задающих и возмущающих воздействий, элементов суммирования и управляемой величины на выходе (см., например, рис.3.1)
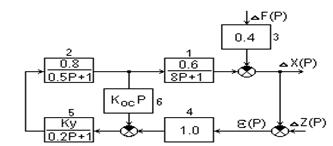
Рис.3.1. Пример структурной схемы САУ:
Dx(р) - изображение отклонения управляемой величины;
DZ(р)- изображение отклонения задающего воздействия;
DF(р) - изображение отклонения возмущающего воздействия.
De(p) - изображение ошибки воспроизведения задающего воздействия.
Звенья и соответствующие им передаточные функции нумеруются арабскими цифрами.
Если какой-либо параметр звена не задан и его значение предстоит выбрать в ходе работы, то в выражении передаточной функции звена он записывается в виде символа (например, Ку, Кос, и т.п.).
На основе правил эквивалентного преобразования структурная схема представляется в виде одного звена с эквивалентной передаточной функцией и с обязательным указанием рассматриваемого воздействия на входе и управляемой величины на выходе. Например, для схемы рис.3.1 возможны эквивалентные схемы, представленные на рис.3.2.
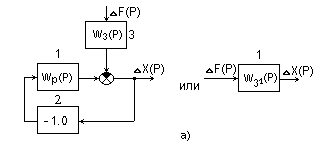

Рис 3.2. Варианты структурных схем, эквивалентных схеме рис.3.1
а - при входном воздействии DF(Р); б - при входном воздействии DZ(Р).
При этом следует иметь в виду, что для САУ, процессы в которых описываются линейными или линеаризованными (в отклонениях) дифференциальными уравнениями, справедлив принцип суперпозиции (наложения).
Поэтому при нахождении эквивалентной передаточной функции по какому-либо воздействию остальные воздействия могут считаться равными нулю.
Например, на рис.3.2,а принимается DZ(Р)=0, а на рис.3.2,б - DF(Р)=0. При этом в схеме рис.3.2,а звено с передаточной функцией - 1.0 отражает отрицательный знак главной обратной связи замкнутой САУ. Для структурных схем рис.3.2,а эквивалентные передаточные функции соответственно имеют вид:
DX(P) W3(P)
Wз1(Р) =---------------- = --------------------- =
DF(P) 1+Wp(P)
- 0.4 (0.8P3+(5.7+6.4KyKoc)P2+(8.7+0.8 KyKoc)P+1)
= ------------------------------------------------------------------------ ;(3.1)
0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1+0.48Ку
DX(P) Wp(P)
Wз2(Р) =--------------- = --------------------- =
DZ(P) 1+Wp(P)
0.48Ку
= ----------------------------------------------------------------------- ,(3.2)
0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1+0.48Ку
Где DX(P) W1(P) W2(P) W5(P) W4(P)
Wр(Р) =-------------- = ------------------------------------------------------------ =
DZ(P) 1 + W2(P) W5(P) W6(P)
0.48Ку
= ---------------------------------------------------------------------------------- =
(8 P +1)[(0.5P+1)(0.2P+1)+0.8 KyKocР]
0.48Ку
= ------------------------------------------------------------------------- . (3.3)
0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1
В выражении передаточной функции целесообразно выделить в явном виде характеристический оператор Д(Р) и операторный коэффициент Кр для передаточных функций (3.1), (3.2) и (3.3)
Дз(Р) = 0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1+0.48Ку; (3.4)
Др(Р) = 0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1; (3.5)
Кз1(Р) = - 0.4 (0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1);
Кз2(Р) = Кр(Р) = 0.48Ку;
4. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
В большинстве заданий (см. Приложение) при оценке статических свойств САУ требуется обеспечить заданный коэффициент статизма по возмущающему воздействию, а также определить ошибку воспроизведения задающего воздействия.
Коэффициент статизма замкнутой САУ характеризует статическую ошибку, обусловленную влиянием возмущающего воздействия. Он численно равен статической ошибке (установившемуся отклонению) при возмущающем воздействии, равном одной относительной единице (в установившемся режиме). Значение его также равно значению коэффициента передачи замкнутой САУ по рассматриваемому возмущающему воздействию. Например, для схемы рис.3.1 с учётом (3.1)
- 0.4
Кс = Кз1 = lim Wз1(P) = --------------------------- (4.1)
P® 0 1 + 0.48Ку
Физически это означает, что, например, при увеличении возмущающего воздействия на Df = 1.0, управляемая величина x изменяется в установившемся режиме на
- 0.4
Dx = Кс = -------------------------
1 + 0.48Ку
Знак минус указывает на то что величина x уменьшается по отношению к исходному значению x0.
Попутно следует заметить, что если бы в рассматриваемом случае отсутствовало управляющее устройство (регулятор) или САУ была разомкнутой (отсутствует главная обратная связь), то статическая ошибка и соответственно коэффициент статизма по возмущающему воздействию имели бы значение
Dx = Кс = - 0.4. При этом
x = x0 + D x = 1.0 - 0.4 = 0.6.
Принято считать статизм положительным, если при увеличении возмущающего воздействия управляемая величина уменьшается. При этом знак минус в (4.1) обычно опускается, т.е. в рассматриваемом случае
0.4
Кс = ------------------------- (4.2)
1 + 0.48Ку
Если задан требуемый коэффициент статизма, то нетрудно определить коэффициент передачи регулятора, при котором он обеспечивается.
Например, из (4.2) следует
0.4 - Кс
Ку = ----------------------- (4.3)
0.48Кс
Найденное требуемое значение коэффициента передачи регулятора обычно округляется до ближайшего целого значения (чтобы легче было устанавливать) и определяется действительное значение коэффициента статизма.
По найденному значению коэффициента статизма легко может быть построена статическая (внешняя) характеристика САУ. Например, на рис.4.1, приведена статическая характеристика САУ, представленной на рис.3.1, при Ку = 20.
С целью сравнения дана также статическая характеристика объекта управления, что соответствует характеристике разомкнутой САУ.
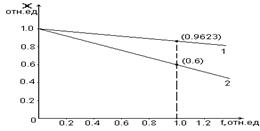
Рис.4.1. Статическая характеристика САУ по рис.3.1 при Ку=20 (линия 1) и объекта управления (линия2).
Для статических САУ коэффициент статизма по задающему воздействию, численно равный ошибке воспроизведения этого воздействия, зависит также от значения коэффициента передачи её по задающему воздействию. Так для САУ по рис.3.1 (см. также рис.3.2,б) с учётом (3.2)
1 1
К’c = = 1.0 - lim Wз2(P) = lim --------------------- = ------------------------
P®0 P®0 1+Wp(P) 1 + 0.48Ку
При Ку = 20 К’с = e = 0.094.
Это означает, что если при отсутствии возмущающего воздействия (например, холостой ход объекта управления) на вход рассматриваемой САУ подать задающее воздействие DZ = 1.0, то управляемая величина на выходе в установившемся режиме будет иметь значение
x = 1.0 - e = 1.0 - 0.094 = 0.906.
За счёт возмущающего воздействия Df это значение x ещё уменьшится на величину Кс Df.
Следует иметь в виду, что если замкнутая САУ имеет последовательно включенное интегрирующее звено, не охваченное жёсткой обратной связью, то она является астатической по задающему воздействию, т.е. безошибочно воспроизводит это воздействие (К’с = e =0).
5. ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
По переходной характеристике определяются динамические показатели качества управления (регулирования):
- время переходного процесса tп;
- перерегулирование g;
- колебательность G.
В реальных линейных САУ управляемая величина асимптотически приближается к установившемуся значению, т. е. теоретически tп = ¥. Поэтому, исходя из практических соображений, под временем переходного процесса понимают интервал времени, по истечении которого (от момента подачи воздействия) начинает выполняться условие
| Dx(t) - Dx | £ D,
где Dx(t) - текущее значение управляемой величины;
Dx - установившееся отклонение;
D - наперёд заданное значение допустимого отклонения управляемой величины от нового установившегося значения.
Часто принимают
D = 0.05Dx
Во время переходного процесса текущее значение отклонения управляемой величины может превышать установившееся отклонение. Разность между максимальным и установившимся отклонением, выраженная в процентах от установившегося отклонения, называется перерегулированием
|Dxмакс - Dx |
g = -------------------------------- 100%
| Dx |
Если переходная характеристика имеет колебательный характер, то оценивается так называемая колебательность.
Колебательность может быть определена отношением второго и первого максимумов переходной характеристики, выраженным в процентах
Dxмакс,2
G =------------------------ 100%
Dxмакс,1
Незатухающие колебания при этом соответствуют колебательности 100%. Колебательность стремится к нулю при уменьшении до нуля второго максимума переходной характеристики.
В данной курсовой работе переходная характеристика может быть получена экспериментально путем математического моделирования САУ (программа “CLASSIC”). При этом имеется возможность легко настраивать САУ на заданные качественные показатели изменением параметров, значения которых не заданы и могут варьироваться (например, Кос на рис.3.1). В качестве примера на рис.5.1 приведен вариант структурной схемы САУ рис.3.1, реализованной на компьютере при входном воздействии Df, выходном - Dx, Ку = 20, Кос = 20.
При исследовании переходного процесса в САУ, обусловленного изменением задающего воздействия (уставки) на DZ(рис.3.1) “вход” следует перенести на звено 4.
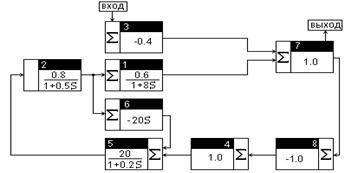
Рис.5.1. Вариант структурной схемы САУ рис.3.1.
Примечание. В программе “CLASSIC” оператор Лапласа обозначен S.
При исследовании переходной характеристики следует изменять параметры варьируемого звена САУ таким образом, чтобы характеристика по возможности имела монотонный характер без перерегулирования и колебательности. Если по каким-либо причинам этого достичь не удаётся, то можно считать допустимым
g £ 20 ¸ 25%; G £ 20%
На рис.5.2., 5.3. приведены переходные характеристики САУ рис.3.1 при Кос = 1.0; 10; 20 и Ку = 20 для воздействий Df и DZ соответственно.
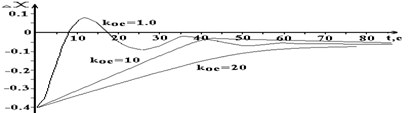
Koc = 1.0
| t,c | 0 | 2.06 | 4.1 | 6.2 | 8.2 | 10.3 | 11.33 | 14.42 | 20.6 | 23.69 | 34 |
| Dx | -0.4 | -0.35 | -0.23 | -0.09 | 0.013 | 0.072 | 0.083 | 0.057 | -0,06 | -0.08 | -0.02 |
Koc = 10
| t,c | 0 | 4.7 | 7.8 | 10.9 | 14 | 20.2 | 26.4 | 29.5 | 35.7 | 42 | 45 |
| Dx | -0.4 | -0.37 | -0.33 | -0.29 | -0.25 | -0.16 | -0.09 | -0.07 | -0.04 | -0.02 | -0.02 |
Koc = 20
| t,c | 0 | 4.6 | 9.13 | 15 | 20 | 25 | 29.6 | 38.7 | 47.8 | 59.2 | 68.3 |
| Dx | -0.4 | -0.38 | -0.36 | -0.3 | -0.26 | -0.23 | -0.19 | -0.14 | -0.10 | -0.07 | -0.06 |
Рис.5.2. Переходная характеристика САУ рис.3.1 при входном воздействии Df(t) = 1.0 и различных значениях Koc.
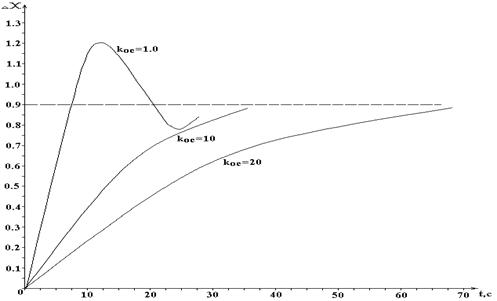
Koc = 1.0
| t,c | 0 | 2.25 | 4.5 | 6.2 | 9 | 10.1 | 11.3 | 11.8 | 13 | 14.6 | 18 |
| Dx | 0 | 0.154 | 0.49 | 0.77 | 1.1 | 1.17 | 1.21 | 1.21 | 1.19 | 1.13 | 0.95 |
Koc = 10
| t,c | 0 | 4 | 6 | 8 | 10 | 11 | 14 | 16 | 18.5 | 20.5 | 24.5 |
| Dx | 0 | 0.05 | 0.1 | 0.16 | 0.23 | 0.28 | 0.38 | 0.45 | 0.54 | 0.6 | 0.7 |
Koc = 20
| t,c | 0 | 4.4 | 10.3 | 14.7 | 19 | 23.5 | 29 | 38 | 45.5 | 48.4 | 57 |
| Dx | 0 | 0.3 | 0.13 | 0.22 | 0.31 | 0.4 | 0.51 | 0.64 | 0.71 | 0.74 | 0.8 |
Рис.5.3. Переходная характеристика САУ рис.3.1 при входном воздействии DZ = 1.0, Ку = 20 и различных значениях Koc.
При подаче воздействия Df(t) = 1.0 (например, включение номинальной нагрузки) управляемая величина x (например, напряжение) мгновенно изменяется на Dx = - 0.4, т. е. уменьшается. При этом x = xо + Dx = 1.0 - 0.4 = 0.6, т. е. при t = 0 и f = 1.0 управляемая величина имеет значение такое же, как при отсутствии управляющего устройства (см. рис.4.1). За счёт действия управляющего устройства (регулятора) после затухания переходного процесса отклонение управляемой величины приобретает значение Dx = - 0.0377.
При Кос = 1.0 переходный процесс имеет колебательный характер с большим перерегулированием. При Кос = 10 перерегулирование составляет
½-0.024 - (-0.0377)½
g = --------------------------------------------------- 100% = 36.3% ,
½-0.0377½
а время переходного процесса tп = 78с. При Кос = 20 перерегулирование отсутствует, но время переходного процесса увеличивается до tп = 120с (на рис.5.2 не показано).
При входном воздействии DZ(t) = 1.0 управляемая величина x = Dx (при xо = 0, Zо = 0 и f(t) = 0) стремится к значению x = 0.906. Причем, характер переходного процесса определяется значением Кос.
На основании анализа переходных характеристик рис.5.2 и 5.3 с целью исключения перерегулирования предварительно принимается Кос =20.
6. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ
Комплексную (амплитудно-фазовую) частотную характеристику (КЧХ, АФХ) W(jw) аналитически легко получить по соответствующей передаточной функции, если положить Р = jw.
Путём выделения в выражении КЧХ вещественной U(w) и мнимой V(w) частей, получаются соответственно вещественная (ВЧХ) и мнимая (МЧХ) частотные характеристики
U(w) = ReW(jw);
V(w) = ImW(jw).
Модуль А(w) и аргумент j(w) КЧХ определяют соответственно амплитудную (АЧХ) и фазовую (ФЧХ) частотные характеристики
U(w) = modW(jw);
V(w) = argW(jw).
Между всеми частотными характеристиками имеют место очевидные соотношения:
W(jw) = U(w) + jV(w) ;
W(jw) = А(w) e jj (w) ;
А(w) = ÖU2(w) + V2(w) ;
V(w)
j(w) = arctg -------------- ;
U(w)
U(w) = А(w)cosj(w);
V(w) = А(w)sinj(w).
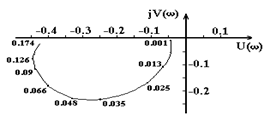
Применительно к САУ рис.3.1 при входном воздействии Df(t) частотные характеристики приведены на рис.6.1 и 6.2.
 а)
а) 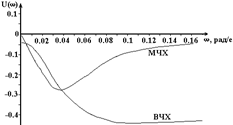 б)
б)
| U(w) | -0.03 | -0.04 | -0.06 | -0.08 | -0.11 | -0.17 | -0.25 | -0.33 | -0.4 | -0.44 | -0.44 |
| V(w) | -0.01 | -0.05 | -0.1 | -0.13 | -0.17 | -0.21 | -0.29 | -0.23 | -0.18 | -0.11 | -0.06 |
| w,рад/с | 0.001 | 0.005 | 0.01 | 0.013 | 0.018 | 0.025 | 0.035 | 0.48 | 0.066 | 0.09 | 0.13 |
Рис.6.1. Комплексная (а), вещественная (б) и мнимая (б) частотные характеристики САУ рис.3.1 при входном воздействии Df(t) и Ку = 20
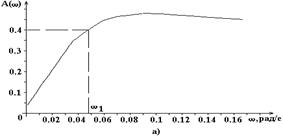
| w,рад/с | 0.001 | 0.005 | 0.01 | 0.013 | 0.018 | 0.025 | 0.035 | 0.048 | 0.066 | 0.09 | 0.13 |
| A(w) | 0.04 | 0.071 | 0.117 | 0.153 | 0.202 | 0.27 | 0.34 | 0.402 | 0.439 | 0.454 | 0.444 |
| j(w),град | 196 | 232 | 239 | 238 | 237 | 231 | 223 | 215 | 204 | 194 | 188 |
Рис.6.2. Амплитудная (а) и фазовая (б) частотные характеристики САУ рис.3.1 при входном воздействии Df(t) и Ку = 20, Кос = 20.
Из частотных характеристик следует, что при гармоническом характере возмущающего воздействия Df(t) влияние его на отклонение управляемой величины Dx(t) очень сильно возрастает с увеличением частоты. Например, при w1 = 0.047 рад/с и Df = 1.0sinw1t Dx(t) = 0.4sin(w1t + 2150), т. е. амплитуда колебаний Dxm = 0.4 имеет такое же значение, как и при отсутствии регулирования. Действительно, если в САУ рис.3.1 разорвать главную обратную связь, то будет
DX(P)
W(P) = ---------------- = - 0.4 ,
DF(P)
соответственно,
W(jw) = -0.4 и А(w) = 0.4.
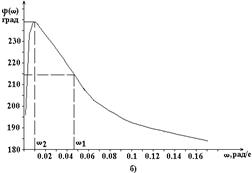
При w > w1 влияние возмущающего воздействия сказывается ещё сильнее. Поэтому функционирование САУ рис.3.1 как системы регулирования будет эффективным только в том случае, если частота изменения возмущающего воздействия Df(t) будет достаточно малой (например, w1 < 0.01 рад/с). Из ФЧХ (рис.6.2,б) следует, что синусоидальные колебания величины на выходе Dx(t) опережают по фазе колебания Df(t) на угол больше 1800. Причем, при Ку = 20, Кос = 20 наибольший сдвиг фаз имеет место при w2 = 0.01 рад/с. Следует также отметить, что при w < w2 = 0.01 рад/с зависимость j(w) весьма резкая. Монотонный характер (без максимума) вещественной (рис.6.1,б) и амплитудной (рис.6.2,а) частотных характеристик свидетельствует о том, что при рассматриваемых параметрах (Ку = 20, Кос =20) скачкообразное изменение Df(t) вызывает монотонный (практически без перерегулирования и колебательности) переходный процесс Dx(t) (см.рис.5.3). На рис.6.3, 6.4 показаны КЧХ, ВЧХ, АЧХ и ФЧХ для случая, когда в качестве входного рассматривается задающее воздействие DZ(t). Характеристики построены при двух значениях Кос.
Кос = 1.0
| U(w) | 0.96 | 0.967 | 1.02 | 1.025 | 0.93 | 0.48 | -0.26 | -0.52 | -0.42 | -0.29 | -0.19 |
| V(w) | 0 | -0.26 | -0.46 | -0.67 | -1.0 | -1.38 | -1.23 | -0.66 | -0.3 | -0.14 | -0.07 |
| w,рад/с | 0 | 0.1 | 0.14 | 0.17 | 0.21 | 0.26 | 0.3 | 0.36 | 0.44 | 0.52 | 0.6 |
Кос = 20
| U(w) | 0.96 | 0.843 | 0.8 | 0.73 | 0.62 | 0.47 | 0.29 | 0.11 | -0.03 | -0.1 | -0.11 |
| V(w) | 0 | -0.27 | -0.34 | -0.42 | -0.5 | -0.57 | -0.58 | -0.53 | -0.42 | -0.28 | -0.16 |
| w,рад/с | 0 | 0.01 | 0.013 | 0.017 | 0.023 | 0.03 | 0.04 | 0.05 | 0.07 | 0.09 | 0.12 |
Рис.6.3. Комплексная (а) и вещественная (б) частотные характеристики САУ рис.3.1 при входном воздействии DZ(t), Ку = 20 и различных значениях Koc.

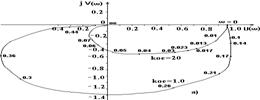
Кос = 1.0
| w,рад/с | 0 | 0.1 | 0.17 | 0.21 | 0.26 | 0.3 | 0.36 | 0.52 | 0.6 | 1.1 |
| A(w) | 0.96 | 1.0 | 1.22 | 1.37 | 1.46 | 1.26 | 0.84 | 0.32 | 0.2 | 0.06 |
| j(w),град | 0 | -15 | -33 | -47 | -71 | -102 | -128 | -154 | -160 | -170 |
Кос = 20
| w,рад/с | 0 | 0.01 | 0.02 | 0.03 | 0.04 | 0.05 | 0.07 | 0.09 | 0.12 | 0.16 |
| A(ww) | 0.96 | 0.89 | 0.8 | 0.74 | 0.65 | 0.54 | 0.42 | 0/3 | 0.2 | 0.11 |
| j(w),град | 0 | -18 | -39 | -50 | -63 | -78 | -94 | -110 | -124 | -142 |
Рис.6.4. Амплитудная (а) и фазовая (б) частотные характеристики САУ рис.3.1 при входном воздействии DZ(t), Ку = 20 и различных значениях Koc.
Из рис.6.4,а видно, что при Кос = 1.0 АЧХ имеет ярко выраженный максимум при частоте wр = 0.26 рад/с. Это свидетельствует о колебательном характере переходной характеристики (см.рис.5.2).
Причём, колебательность составляет [1]:
Aмакс 1.46
G = ------------- = --------------- = 1,52.
А(о) 0.96
При этом время переходного процесса имеет значение
2p 2*3,14
tп » (1 ¸ 2) -------- = (1 ¸ 2) -------------- = 24 ¸ 48с
wр 0.26
и на этом интервале времени имеют место 1 ¸ 2 колебания. Время достижения первого максимума составляет
p 3.14
tмакс »---------- = ----------------- = 6с.
2wр 2*0.26
О повышенной колебательности САУ рис.3.1 при Кос = 1.0 свидетельствует также наличие отрицательного минимума у ВЧХ (рис.6.3,б). При этом перерегулирование имеет значение [1]:
1.18Uмакс - U(0) 1.18 * 1.025 - 0.96
< -------------------------------- 100% = ------------------------ *100% = 53.6%.
U(0) 0.96
Время переходного процесса определяется шириной характеристики U(w), ограниченной значением частоты wп (рис.6.3,б), при котором положительная часть U(w) становится меньше 0.2U(0) = 0.2*0.96 = 0.192. Величину wп называют интервалом положительности U(w). При этом
p 3.14
tп ³ (1 ¸ 4) ------------- = (1 ¸ 4) -------------- = 12 ¸ 48с.
wп1 0.26
При Кос = 20 ВЧХ (рис.6.3,б) и АЧХ (рис.6.4,а) не имеют максимумов при w>0, что свидетельствует об отсутствии перерегулирования (см.рис.3.2). Однако, при этом существенно увеличивается (по сравнению с Кос = 1.0) время переходного процесса (wп2 < wп1) и уменьшается частотная полоса пропускания задающего воздействия (w £ 0.02 рад/с). Это может неблагоприятно сказаться на функционировании САУ, если задающее воздействие для неё будет формироваться автоматически как результат функционирования системы управления более высокого иерархического уровня. При высокой частоте изменения воздействия DZ(t) САУ (при Кос = 20) будет отрабатывать задания с большой погрешностью.
При ручном формировании задающего воздействия уменьшение полосы пропускания по нему и увеличение времени переходного процесса могут не иметь существенного значения. Поэтому целесообразно принять Кос = 20, что обеспечивает переходный процесс, близкий к экспоненциальному, как при воздействии DZ(t), так и при Df(t).
7. ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПО РАСПОЛОЖЕНИЮ НУЛЕЙ И ПОЛЮСОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ В КОМПЛЕКСНОЙ ПЛОСКОСТИ
Качество процесса управления может быть оценено по расположению нулей и полюсов передаточной функции в комплексной плоскости.
Чем ближе к оси мнимых величин расположены полюсы (корни характеристического уравнения) и при этом вблизи этих полюсов нет нулей, тем больше амплитуда свободных составляющих переходного процесса. Сопряженные комплексные полюсы обуславливают наличие колебательной составляющей в процессе. Вещественная часть полюсов определяет быстроту затухания свободной составляющей, а мнимая часть - частоту колебаний. По мере увеличения мнимой и уменьшения вещественной частей комплексного корня увеличивается колебательность процесса.
Если передаточная функция замкнутой САУ не имеет нулей, то время переходного процесса может быть определено по значению вещественной части полюса, наиболее близко расположенного к оси мнимых величин
Ln N
tп = -------------- , (7.1)
a
где N - заданное число раз, в которое уменьшается значение свободной составляющей переходного процесса за время tп;
a - абсолютное значение вещественной части полюса.
Если время переходного процесса является заданным, то можно получить соответствующее минимально - допустимое значение вещественной части полюса, наиболее близко расположенного к оси мнимых величин. Это значение принято называть степенью устойчивости.
Степень устойчивости определяется по формуле
Ln N
Qмин = ----------- .
tп
Колебательность САУ может быть определена как
G = tgd, (7.2)
где d - минимальный угол, в двойной раствор которого вписываются все комплексные полюсы.
При наличии нулей передаточной функции оценка показателей качества по полюсам может дать большую ошибку, причём тем большую, чем ближе к оси мнимых величин расположены нули.
На рис.7.1 и 7.2 приведено расположение нулей и полюсов передаточных функций замкнутой САУ рис.3.1 для воздействий Df(t) и DZ(t) при различных значениях Кос, а также значения показателей качества, определенные по (7.1) и (7.2) при N = 10.
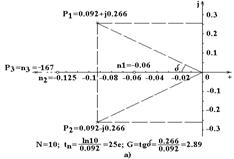
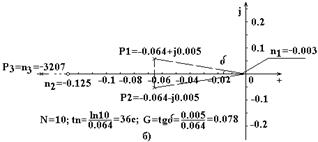
Рис.7.1. Нули (n) и полюсы (р) передаточной функции САУ рис.3.1 при входном воздействии Df(t), Ку = 20, Кос = 1.0 (а) и Кос = 20 (б).
Из рис.7.1 и 7.2 следует, что при Ку = 1.0 и Кос = 1.0 значение свободной составляющей переходного процесса уменьшается в 10 раз за время tn = 25с, а при Ку = 20, Кос = 20 - за время tn = 36c. Показатель колебательности при этом имеет, соответственно, значения G = 28,9 (сильная колебательность) и G = 0.078 (колебательность практически отсутствует).
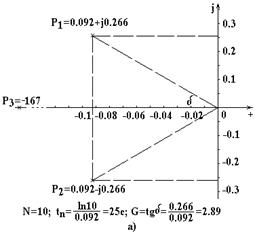
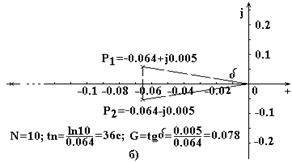
Рис.7.2. Полюсы передаточной функции САУ рис.3.1 при входном воздействии DZ(t), Ку = 20, Кос = 1.0 (а) и Кос = 20 (б).
8. ОБЛАСТЬ УСТОЙЧИВОСТИ
Область устойчивости в пространстве варьируемых параметров рассчитывается и строится для оценки границ возможного их изменения без нарушения устойчивости САУ.
Параметры, в пространстве которых должна быть построена область устойчивости, определены заданием. Построение может быть осуществлено применением аналитических методов (Д-разбиение, определители Гурвица и др.) или с помощью специальной компьютерной программы “Расчёт областей устойчивости”. Предпочтительным является аналитический метод с проверкой результатов расчёта на компьютере.
В качестве примера ниже приведены расчет и построение области устойчивости САУ по рис.3.1 в плоскости параметров Ку и Кос.
Характеристическое уравнение замкнутой САУ
Дз(р) = 0.8Р3 + (5.7 + 6.4 КуКос)Р2 + (8.7 + 0.8 КуКос)Р + 1 + 0.48Ку=0
целесообразно представить в виде
1 1 1 1
Дз(р) = --- 0.8 Р3+--- 5.7Р2+6. 4 КосР2+--- 8.7Р+0.8 КосР+---+0.48=0, (8.1)
Ку Ку Ку Ку или
1
Дз(р) = ------ S( P) + КосR(P) + Q(P) = 0 ,
Ку
где S(P) = 0.8Р3 + 5.7Р2 + 8.7Р + 1;
R(P) = 6.4Р2 + 0.8Р;
Q(P) = 0.48
Положим Р = jw, тогда
S(jw) = - j 0.8w3 - 5.7w2 + j8.7w + 1 = x1(w) + jy1(w);
R(jw) = - 6.4w2 + j 0.8w = x2(w) + jy2(w);
Q(jw) = 0.48 = x3(w) + jy3(w),
Где x1(w) = - 5.7w2 + 1; y1(w) = - 0.8w3 + 8.7w;
x2(w) = - 6.4w2; y2(w) = 0.8w;
x3(w) = 0.48; y3(w) = 0.
Составим определители:
![]()
![]() - x3(w) x2(w)
- x3(w) x2(w)
D1(w) = = - 0.384w;
- y3(w) y2(w)
![]()
![]() x1(w) - x3(w)
x1(w) - x3(w)
D2(w) = = - 0.384w3 + 4.176w;
y1(w) - y3(w)
![]()
![]() x1(w) x2(w)
x1(w) x2(w)
D(w) = = - 5.12w5 + 5.12w3 + 0.8w.
y1(w) y2(w)
Искомые параметры, соответствующие координатам границы Д - разбиения,
D(w)
Ку(w) = ------------ = 13.34w4 - 131.125w2 - 2.08; (8.2)
D1(w)
D2(w) 0.48w2 - 5.22
Кос(w) = —----------- = ------------------------------------------- (8.3)
D(w) 6.4w4 - 63.9w2 - 1
Из приведенных выражений следует:
а) Ку(w) = 0 при w = ± 3.16 рад/с;
Ку(w) > 0 при |w| > 3.16 рад/с;
Ку(w) < 0 при |w| < 3.16 рад/с;
б) Кос(w) = 0 при w = ± 3.298 рад/с;
К о с (w) > 0 при 0 < |w| < 3.16 рад/с, |w| > 3. 298 рад/с;
К о с (w) < 0 при 3.16 < |w| < 3. 298 рад/с;
в) при w = 0 имеет место особая прямая, уравнение которой получим, приравняв нулю свободный член характеристического полинома
1 + 0.4 Ку = 0, откуда Ку = - 2.08
Примечание: Для получения особой прямой при w = ¥ следует приравнять нулю коэффициент при старшей степени характеристического полинома. В рассматриваемом случае указанная особая прямая отсутствует.
г) D(w) > 0 при 0 < w < 3.16, -3.16 < w < 0.
Граница Д - разбиения приведена на рис.8.1 (с целью наглядности в разных квадрантах приняты разные масштабы по осям координат). Учитывая, что в Д-разбиении фигурирует параметр 1/Ку (см.8.1), а графическое построение осуществлено относительно параметра Ку (ось абсцисс), штриховка нанесена на правую часть кривой по направлению обхода от w = 0 до w = ¥ при D(w) > 0 и левую - при D(w) < 0. Особая прямая снабжена одинарной штриховкой, направленной в сторону штриховки основной кривой.
Претендентом на область устойчивость является практически весь первый квадрант плоскости Ку, Кос.
Для определения области устойчивости положим Ку = 20 и Кос = 20. Для устойчивости рассматриваемой САУ третьего порядка по Гурвицу достаточно, чтобы D2 = (5.7+6.4КуКос)(8.7+0.8КуКос) - 0.8(1+0.48Ку) > 0 что при указанных значениях параметров выполняется. Поэтому претендент является областью устойчивости.
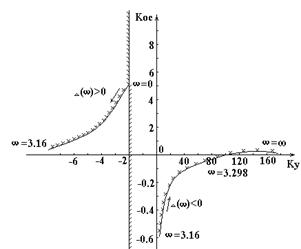
| w,рад/с | 0 | 0.1 | 0.5 | 1.0 | 2 | 3.2 | 3.25 | 3.3 | 3.5 | 5 | ¥ |
| Ку | -2.08 | -3.4 | -34 | -120 | -313 | 32 | 78 | 150 | 391 | 5050 | ¥ |
| Кос | 5.22 | 3.18 | 0.3 | 0.08 | 0.02 | -0.19 | -0.00 | 1.42 | 0.004 | 0.003 | 0 |
Рис.8.1. Граница Д - разбиения САУ рис.3.1 в плоскости параметров Ку, Кос.
Из рис.8.1 следует, что по условиям устойчивости САУ рис.3.1 значения Ку, Кос могут быть выбраны в очень широких диапазонах (практически от 0 до + ¥). Поэтому целесообразно эти значения определять, исходя из других условий (например обеспечение заданного статизма и качества управления).
9. ЗАПАС УСТОЙЧИВОСТИ
Запас устойчивости является мерой количественной оценки степени отстроенности параметров САУ от границы устойчивости, определяемой в соответствии с критерием Найквиста удаленностью (по модулю и фазе) годографа КЧХ (АФХ) разомкнутой системы от критической точки (-1.0; j0).
Запас устойчивости по модулю определяется величиной
DH = 1.0 - | Wp(jwо)|, (9.1)
где | Wp(jwо)| - модуль КЧХ (АЧХ) при частоте wо, соответствующей пересечению годографом Wp(jw) отрицательной полуоси вещественных величин.
Запас устойчивости по фазе соответствует углу
Dj = p- argWp(jw1), (9.2)
где - argWp(jw1) - аргумент КЧХ (АЧХ) при частоте w1, соответствующей пересечению годографом Wp(jw) окружности единичного радиуса.
Запас устойчивости может быть определен аналитически, графически по годографу КЧХ(АФХ), а также по логарифмическим АЧХ и ФЧХ.
Для аналитического определения DH следует решить относительно wо уравнение
Vp (wо)
arctg ----------------- = p
Up (wо)
и подставить найденное wо в (9.1).
Аналогично, для определения Dj необходимо из уравнения
ÖU2p (w1) + V2p(w1) = 1.0
найти значение w1 и подставить его в (9.2).
Графическое определение DН и Dj по КЧХ не нуждается в пояснениях. Следует только иметь в виду, что для определения Dj непосредственно из графика должны быть приняты одинаковыми масштабы по осям координат комплексной плоскости.
Для определения запасов устойчивости по логарифмическим частотным характеристикам следует рассмотреть интервал частот, для которого L(w) > 0. На этом интервале значение DL(wо), соответствующее частоте wо, при которой j(wо) = - p(-3p, -5p, ...) определяет запас по модулю (в децибелах). Аналогично, значение j(w1), соответствующее частоте w1, при которой L(w1) = 0, дает запас устойчивости по фазе.
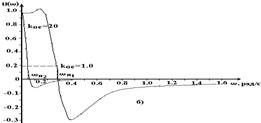
В качестве примера на рис.9.1. приведен годограф КЧХ разомкнутой САУ рис.3.1 Годограф не пересекает полуось отрицательных вещественных величин, поэтому DH = 1.0. Запас устойчивости по фазе Dj = 70° определен по пересечению годографа с окружностью единичного радиуса. Полученные значения DH и Dj свидетельствуют о достаточно высоком запасе устойчивости замкнутой САУ рис.3.1.
| U(w) | 8.68 | 2.5 | 0.7 | 0.28 | 0.04 | -0.09 | -0.15 | -0.17 | 0 |
| V(w) | -2.86 | -4.4 | -2.9 | -2.18 | -1.6 | -1.15 | -0.8 | -0.56 | 0 |
| w,рад/с | 0.001 | 0.005 | 0.009 | 0.013 | 0.018 | 0.025 | 0.035 | 0.05 | ¥ |
Рис.9.1. КЧХ разомкнутой САУ рис.3.1 при Ку = 20, Кос = 20.
10. ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАБОТЫ
Результаты курсовой работы представляются в виде пояснительной записки, оформленной в соответствии с требованиями государственного стандарта ГОСТ 7.392-91 “Отчет о НИР. Структура и правила оформления”.
Содержание пояснительной записки должно соответствовать заданию, текст которого с указанием номера варианта и конкретных исходных данных должен быть приведен непосредственно за титульным листом и входить в общую нумерацию страниц.
Каждый раздел пояснительной записки должен содержать краткую постановку задачи проводимого исследования, указание на используемые методы, необходимые математические выражения и их преобразования, графические иллюстрации, а также краткие комментарии (выводы) полученных результатов.
Содержанием графических иллюстраций должны быть:
- исходная структурная схема заданной САУ с указанием заданных передаточных функций звеньев и точек приложения воздействий;
- структурная схема САУ, полученная после эквивалентных преобразований (при необходимости);
- статические, переходные и частотные характеристики, соответствующие заданным входным воздействиям и различным значениям варьируемых параметров;
- графическое представление на комплексной плоскости нулей и полюсов эквивалентных передаточных функций САУ;
- область (или области) устойчивости в пространстве варьируемых параметров с обязательным указанием точки, координаты которой соответствуют принятым значениям этих параметров;
- графическая оценка запаса устойчивости САУ (при необходимости).
При представлении графиков (характеристик) должны быть обозначены координатные оси, указаны масштабы по осям или приведена координатная сетка. Подрисуночная надпись должна содержать информацию о значениях параметров, которым соответствует приводимая характеристика.
В ЗАКЛЮЧЕНИИ должны быть приведены краткие выводы о свойствах исследуемой системы, числовые значения показателей качества управления, их оценка и, по возможности, рекомендации по их улучшению.
ЛИТЕРАТУРА
1. Коротков В.Ф. Основы линейной теории автоматического управления в задачах электроэнергетики: Учебное пособие с компьютерным лабораторным практикумом АОС - ТАУ / Иван. Гос. Энерг. ун-т. - Иваново, 1994. - 392 с.
ПРИЛОЖЕНИЕ
Задание 1
1. Провести исследование системы автоматического регулирования частоты вращения гидроагрегата, работающего в режиме холостого хода
2. Исходные данные.
2.1. Структурная схема
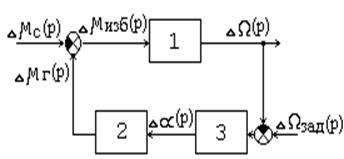
1 - генератор;
2 - гидротурбина;
3 - регулятор;
mс- момент сопротивления, (о.е.);
mг - момент, развиваемый турбиной, (о.е.);
a - степень открытия регулирующего клапана турбины, (о.е.);
W - частота вращения турбины, (о.е.).
2.2. Передаточные функции элементов структурной схемы
DW(p) 1
W1(р) =----------------- = ----------- ;
Dmизб(р) Тар
Dmг (p) -0.1Т0р+1
W2(р) = ----------------- = ------------------------ ;
Da(р) 0.05Т0р+1
Da(p) Кр(1+К’р+К’’р2)
W3(р) = ----------------- = ------------------------------------------- ,
DW(р) Трр+1
где Та - постоянная инерции агрегата, отнесенная к базисной (номинальной) мощности, (с);
Т0 - постоянная времени водовода при номинальной частоте вращения, соответствующая номинальной нагрузке агрегата, (с);
Тр - постоянная времени регулятора, (с);
Кр, К’, К’’ - коэффициенты передачи регулятора.
2.3. Параметры элементов структурной схемы
| Параметры | Варианты | |||||||||
| 1.1 | 1.2 | 1.3 | 1.4 | 1.5 | 1.6 | 1.7 | 1.8 | 1.9 | 1.10 | |
|
Та,с |
10 | 8.0 | 8.0 | 10 | 10 | 8.0 | 5.0 | 5.0 | 5.0 | 10 |
|
Т0,с |
2.0 | 1.0 | 2.0 | 1.0 | 2.0 | 2.0 | 2.0 | 1.0 | 2.0 | 1.0 |
|
Тр,с |
5.0 | 5.0 | 20 | 5.0 | 20 | 5.0 | 10 | 10 | 20 | 20 |
3. Содержание задания.
3.1. Составить структурную схему и найти эквивалентные передаточные функции САУ по воздействиям Dmс и DWзад.
3.2. Выбрать значение Кр.расч., при котором обеспечивается статизм регулирования Кс £ 0.04 (по возмущающему воздействию mс).
Построить статическую (внешнюю) характеристику САУ W = f(mс). Определить установившееся значение управляемой величины W и статическую ошибку DW при mс = 1.0.
3.3. Рассчитать и построить переходную характеристику системы DW=f(t) при выбранном значении Кр = Кр.расч. и различных значениях К’ и К” (для входных воздействий Wзад = 1.0 и mс = 1.0.
Выбрать значения К’ = К’расч. и К” = К”расч., при которых переходные процессы имеют затухающий и, по возможности, монотонный (без перерегулирования) характер. Определить время переходного процесса tп и, при необходимости, перерегулирование g и колебательность G.
Значения К” целесообразно принимать в диапазоне
0.5 ТаТр
0< К’’ < -----------------------
Кр
3.4. Рассчитать и построить КЧХ, АЧХ, ФЧХ и ВЧХ системы в замкнутом состоянии, оценить частотные свойства ее и показатели качества регулирования (tп, g, G). Сравнить полученные значения показателей качества с соответствующими значениями пункта 3.3.
3.5. Определить показатели качества регулирования (tп, G) по расположению нулей и полюсов передаточной функции системы в комплексной плоскости и сравнить их с соответствующими значениями пунктов 3.3 и 3.4.
3.6. Рассчитать и построить область устойчивости системы в плоскости параметров Кр, К’ при К” = К”расч. Окончательно выбрать значения Кр.расч. и К’расч.
3.7. Определить запас устойчивости системы по модулю и фазе (по Найквисту).
Задание 2
1. Провести исследование системы автоматического регулирования частоты вращения гидроагрегата, работающего на выделенную нагрузку.
2. Исходные данные.
2.1. Структурная схема
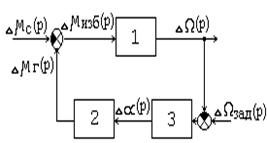
1 - генератор, работающий на выделенную нагрузку;
2 - гидротурбина;
3 - регулятор;
mс- момент сопротивления, (о.е.);
mг - момент, развиваемый турбиной, (о.е.);
a - степень открытия регулирующего клапана турбины, (о.е.);
W - частота вращения турбины, (о.е.).
2.2. Передаточные функции элементов структурной схемы:
DW(p) Ка
W1(р) =----------------- = --------------;
Dmизб(р) Тар+1
Dmг(p) -0.1Т0р+1
W2(р) =--------------- = ------------------------;
Da(р) 0.05Т0р+1
Da(p) Кр(1+К’р+К’’р2 )
W3(р) =--------------- = -------------------------------------,
DW(р) ТрP+1
где Та - постоянная инерции агрегата с учетом нагрузки, отнесенная к базисной (номинальной) мощности, (с);
Т0 - постоянная времени водовода при номинальной частоте вращения, соответствующая номинальной нагрузке агрегата, (с);
Тр - постоянная времени регулятора, (с);
Ка, Кр, К’, К’’ - коэффициенты передачи.
2.3. Параметры элементов структурной схемы
| Параметры | Варианты | |||||||||
| 2.1 | 2.2 | 2.3 | 2.4 | 2.5 | 2.6 | 2.7 | 2.8 | 2.9 | 2.10 | |
|
Ка |
1.0 | 0.8 | 0.5 | 0.4 | 1.0 | 0.8 | 1.0 | 0.8 | 1.0 | 0.5 |
|
Та,с |
10 | 6.4 | 4.0 | 4.0 | 10 | 6.4 | 5.0 | 4.0 | 5.0 | 5.0 |
|
Т0,с |
2.0 | 1.0 | 2.0 | 1.0 | 2.0 | 2.0 | 2.0 | 1.0 | 2.0 | 1.0 |
|
Тр,с |
5.0 | 5.0 | 20 | 5.0 | 20 | 5.0 | 10 | 10 | 20 | 20 |
3. Содержание задания.
3.1. Составить структурную схему и найти эквивалентные передаточные функции САУ по воздействиям Dmс и DWзад.
3.2. Выбрать значение Кр.расч., при котором обеспечивается статизм регулирования Кс £ 0.05 (по возмущающему воздействию mс).
3.3. Рассчитать и построить переходные характеристики системы DW=f(t) при выбранном значении Кр=Кр.расч. и различных значениях К’ и К” (для входных воздействий Wзад = 1.0 и mс = 1.0.
Выбрать значения К’ = К’расч. и К” = К”расч., при которых переходные процессы имеют затухающий и, по возможности, монотонный (без перерегулирования) характер. Определить время переходного процесса tп и, при необходимости, перерегулирование g и колебательность G.
Значения К” целесообразно принимать в диапазоне
0.5 ТаТр
0< К’’ <-----------------
КаКр
3.4. Рассчитать и построить КЧХ, АЧХ, ФЧХ и ВЧХ системы в замкнутом состоянии, оценить частотные свойства и показатели качества регулирования (tп, g, G). Сравнить полученные значения показателей качества с соответствующими значениями пункта 3.3.
3.5. Определить показатели качества регулирования (tп, G) по расположению нулей и полюсов передаточной функции системы в комплексной плоскости и сравнить их с соответствующими значениями пунктов 3.3 и 3.4.
3.6. Рассчитать и построить область устойчивости системы в плоскости параметров Кр, К’ при К” = К”расч.
Окончательно выбрать значения Кр.расч. и К’расч.
3.7. Определить запас устойчивости системы по модулю и фазе (по Найквисту).
Задание 3
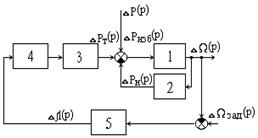
1. Провести исследование системы автоматического регулирования активной мощности ГЭС.
2. Исходные данные.
2.1. Структурная схема
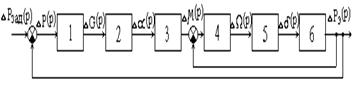
1- регулятор мощности;
2 - серводвигатель;
3 - гидравлическая турбина;
4 - звено, моделирующее изменение частоты вращения эквивалентного гидроагрегата от изменения момента;
5 - звено, моделирующее изменение угла Dd от изменения частоты вращения DW;
6 - звено, моделирующее изменение электрической мощности эквивалентного гидрогенератора от изменения угла Dd;
Рзад - задание по мощности, (о.е.);
Рэ - электрическая мощность эквивалентного гидрогенератора, (о.е.);
G - регулирующее воздействие на входе серводвигателя, (о.е.);
a - степень открытия направляющего аппарата, (о.е.);
m - момент на валу турбины, (о.е.);
W - угловая частота вращения, (о.е.);
d - угол между векторами ЭДС эквивалентного гидрогенератора ГЭС и эквивалентного генератора приемной энергетической системы.
2.2. Передаточные функции элементов структурной схемы
DG(p) Da(р) К’p + 1
W1(р) =-------- = Кр ; DР = DРзад - DРэ; W2(р) =-------- = ---------------;
DP(р) DG(p) Трр
Dm(p) 1 - a0Т0р DW(р) 1
W3(р) =----------- = ------------------- ; W 4(р) =--------------- = --------- ;
Da(р) 1 + 0.5a0Т0р Dm(p) Тар
Dd(р) 1 DРэ
W 5(р) = ----------- = ----------- ; W 6(р) = ----------- = К х + К ‘х P,
DW(p) Тdр Dd(р)
где Кр - коэффициент передачи регулятора мощности;
К’ - коэффициент передачи по скорости изменения мощности;
Тр - постоянная времени регулятора, (с);
a0 - исходная нагрузка эквивалентного гидроагрегата, (о.е.);
Т0 - постоянная времени водовода при номинальной частоте вращения, соответствующая номинальной нагрузке агрегата, (с);
Та - постоянная инерции эквивалентного гидроагрегата, отнесенная к базисной (номинальной) мощности, (с); Тd = 0.00318 с (при wном = 314 рад/с);
К х , К ‘х - коэффициенты передачи эквивалентного гидроагрегата.
2.3. Параметры элементов структурной схемы
| Параметры | Варианты | |||||||||
| 3.1 | 3.2 | 3.3 | 3.4 | 3.5 | 3.6 | 3.7 | 3.8 | 3.9 | 3.10 | |
|
Т0,с |
2.0 | 2.0 | 1.0 | 2.0 | 1.0 | 1.0 | 3.0 | 2.0 | 1.0 | 2.0 |
|
Та,с |
8.0 | 10 | 8.0 | 5.0 | 10 | 8.0 | 10 | 10 | 8.0 | 12 |
|
Тр,с |
5.0 | 4.0 | 4.0 | 7.0 | 5.0 | 5.0 | 5.0 | 7.0 | 5.0 | 5.0 |
|
Кх |
1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
|
К’х |
0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
3. Содержание задания.
3.1. Рассчитать и построить переходную характеристику системы DРэ = f(t) для a0 = 1.0 и a0 = 0.1 (холостой ход) при DРзад = 1.0, Кр = Кр,расч. и различных значениях Кр и К’.
Выбрать значение Кр,расч и К’расч., при которых переходный процесс имеет затухающий и, по возможности, монотонный (без перерегулирования) характер.
3.2. Рассчитать и построить КЧХ, АЧХ и ФЧХ системы в замкнутом состоянии, оценить частотные свойства (при a0 = 1.0) и качество регулирования.
3.3. Определить показатели качества регулирования по расположению нулей и полюсов передаточной функции системы в комплексной плоскости.
3.4. Рассчитать и построить область устойчивости системы в плоскости параметров Кр и К’ при a0 = 1.0 и a0 = 0.1.
3.5. Определить запас устойчивости системы по модулю и фазе (по Найквисту).
Задание 4
1. Провести исследование системы автоматического регулирования частоты вращения турбоагрегата (без промежуточного перегрева пара), работающего на выделенную (изолированную) электрическую нагрузку.
2. Исходные данные.
2.1. Структурная схема
1-турбогенератор;
2 - звено, моделирующее регулирующий эффект электрической нагрузки;
3 - паровая турбина;
4 - гидравлический серводвигатель;
5 - регулятор частоты вращения;
W - угловая частота вращения, (о.е.);
Р - потребляемая электрическая мощность (нагрузки), (о.е.);
Рт - механическая мощность на валу турбины, (о.е.);
DРн - изменение мощности, обусловленное регулирующим эффектом нагрузки, (о.е.);
Н - степень открытия регулирующего клапана турбины, (о.е.);
l - регулирующее воздействие на выходе регулятора, (о.е.).
2.2. Передаточные функции элементов структурной схемы
DW(p) 1 DРн(р)
W1(р) =---------------- = ------- ; W2(р) =-------------- = К н ;
DPизб(р) TJP DW(p)
DРт(p) 1 DН(р) 1
W3(р) =------------- = --------------- ; W4(р) =--------------- = --------------- ;
DН(р) Тп р + 1 Dl(p) Тд р + 1
Dl(р)
W5(р) = -------------- = Кр (1 + К`р) ,
DW(p)
где ТJ - постоянная времени механической инерции, (с);
Кн - коэффициент регулирующего эффекта нагрузки;
Тп - постоянная времени паропровода, (с);
Кр, К’- коэффициенты передачи.
2.3. Параметры элементов структурной схемы
| Параметры | Варианты | |||||||||
| 4.1 | 4.2 | 4.3 | 4.4 | 4.5 | 4.6 | 4.7 | 4.8 | 4.9 | 4.10 | |
|
ТJ,с |
15 | 15 | 12 | 10 | 15 | 15 | 10 | 12 | 10 | 10 |
|
Тп,с |
5.0 | 5.0 | 4.0 | 6.0 | 4.0 | 7.0 | 5.0 | 6.0 | 4.0 | 5.0 |
|
Тд,с |
0.5 | 0.4 | 0.6 | 0.4 | 0.4 | 0.5 | 0.5 | 0.6 | 0.4 | 0.6 |
|
Кн |
1.5 | 1.0 | 1.2 | 1.0 | 1.2 | 1.0 | 1.2 | 1.5 | 1.0 | 0.8 |
3. Содержание задания.
3.1. Выбрать значение Кр,расч., при котором обеспечивается статизм регулирования Кс £ 0.04.
3.2. Рассчитать и построить переходную характеристику системы DW=f(t) при DР = 1.0, Кр = Кр.расч. и различных значениях К’.
Выбрать значение К’расч., при котором переходный процесс имеет затухающий и, по возможности, монотонный (без перерегулирования) характер.
3.3. Рассчитать и построить КЧХ, АЧХ и ФЧХ системы в замкнутом состоянии, оценить частотные свойства и качество регулирования.
3.4. Определить показатели качества регулирования по расположению нулей и полюсов передаточной функции системы в комплексной плоскости.
3.5. Рассчитать и построить область устойчивости системы в плоскости параметров Кр, К’.
Окончательно выбрать значения Кр.расч. и К’расч.
3.6. Определить запас устойчивости системы по модулю и фазе (по Найквисту).
Задание 5
1. Провести исследование системы автоматического регулирования возбуждения синхронного генератора с электромашинным возбудителем.
2. Исходные данные.
2.1. Структурная схема
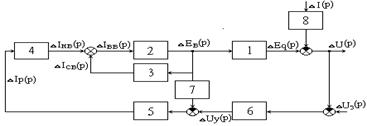
1- генератор;
2 - возбудитель;
3 - звено, моделирующее цепь самовозбуждения возбудителя;
4 - звено, моделирующее цепь независимого возбуждения возбудителя;
5 - усилительный орган регулятора;
6 - измерительный орган регулятора;
7 - звено гибкой обратной связи по напряжению возбуждения генератора;
8 - звено, моделирующее влияние тока нагрузки на изменение напряжения генератора;
U - напряжение генератора, (о.е.);
I - ток нагрузки генератора, (о.е.);
Eq - ЭДС генератора, (о.е.);
EB - ЭДС возбудителя;
Iвв - ток возбуждения возбудителя, (о.е.);
Iсв - ток самовозбуждения возбудителя, (о.е.);
Iнв - ток независимого возбуждения возбудителя, приведенный к обмотке самовозбуждения, (о.е.);
IР - ток выхода регулятора, (о.е.);
Uу - напряжение управления усилительным органом регулятора, (о.е.);
Uз - предписанное (заданное) значение напряжения генератора, (о.е.).
2.2. Передаточные функции элементов структурной схемы
DEq(p) Kг DEВ(р)
W1(р) =-------------- = ---------------; W2(р) =------------ = К 0 ;
DEв(р) Tвр + 1 DIвв(p)
DIсв(p) Ксв DIнв(р) Кнв
W3(р) = -------------- = ---------------- ; W 4(р) = -------------- = ---------------- ;
DEВ(р) Тсвр + 1 DIр(p) Тнвр + 1
DIр(p) Ку DUу(р)
W 5(р) = -------------- = -------------- ; W 6(р) = -------------- = Ки ;
DUу(р) Тур + 1 DU(p)
DUу(p) DEq(р)
W7(р) = -------------- = Кос P; W8(р) = -------------- = Xd sinj ;
DEВ(р) DI(p)
где Кг - коэффициент передачи генератора;
Тв - постоянная времени обмотки возбуждения генератора, (с);
К0 - коэффициент передачи возбудителя;
Ксв - коэффициент передачи цепи самовозбуждения возбудителя;
Тсв - постоянная времени цепи самовозбуждения, (с);
Кнв - коэффициент передачи цепи независимого возбуждения возбудителя;
Тнв - постоянная времени цепи независимого возбуждения возбудителя, (с);
Ку - коэффициент передачи усилительного органа регулятора;
Ту - постоянная времени усилительного органа регулятора, (с);
Кu - коэффициент передачи измерительного органа регулятора;
Кос - коэффициент передачи звена обратной связи;
Xd - синхронное сопротивление генератора, (о.е.);
cos j - коэффициент мощности генератора.
2.3. Параметры элементов структурной схемы
| Параметры | Варианты | |||||||||
| 5.1 | 5.2 | 5.3 | 5.4 | 5.5 | 5.6 | 5.7 | 5.8 | 5.9 | 5.10 | |
| Xd | 1.65 | 1.71 | 1.85 | 2.07 | 2.46 | 2.65 | 2.2 | 1.51 | 1.9 | 1.2 |
|
Тв,с |
7.45 | 7.26 | 7.93 | 7.9 | 10.4 | 10.4 | 10.35 | 6.15 | 6.23 | 8.85 |
|
К0 |
0.5 | 0.6 | 0.4 | 0.6 | 0.5 | 0.4 | 0.6 | 0.4 | 0.5 | 0.6 |
|
Тсв,с |
2.0 | 2.4 | 2.5 | 2.2 | 2.0 | 2.4 | 2.1 | 2.3 | 2.0 | 2.5 |
|
Тнв,с |
1.2 | 1.0 | 1.5 | 1.4 | 1.0 | 1.2 | 1.1 | 1.2 | 1.0 | 1.4 |
|
Ту,с |
0.8 | 0.6 | 0.8 | 0.6 | 0.8 | 0.6 | 0.8 | 0.6 | 0.8 | 0.6 |
|
Кн |
1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
Кг = 1.0; Кнв = 1.0; Ксв = 0.7; Ки = 1.0; cos j = 0.8.
3. Содержание задания.
3.1. Выбрать значение Ку,расч., при котором обеспечивается статизм регулирования Кс £ 0.05.
3.2. Рассчитать и построить переходную характеристику системы DU = f(t) при DI = 1.0, Ку = Ку,расч. и различных значениях Кос.
Выбрать значение Кос,расч., при котором переходный процесс имеет затухающий и, по возможности, монотонный (без перерегулирования) характер.
3.3. Рассчитать и построить КЧХ, АЧХ и ФЧХ системы в замкнутом состоянии, оценить частотные свойства и качество регулирования.
3.4. Определить показатели качества регулирования по расположению нулей и полюсов передаточной функции системы в комплексной плоскости.
3.5. Рассчитать и построить область устойчивости системы в плоскости параметров Ку, Кос.
Окончательно выбрать значения Ку.расч. и Кос.расч.
3.6. Определить запас устойчивости системы по модулю и фазе (по Найквисту).