
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Реферат: Типовые динамические звенья и их характеристики
Реферат: Типовые динамические звенья и их характеристики
Типовые динамические звенья и их характеристики
Динамическим звеном называется элемент системы, обладающий определенными динамическими свойствами.
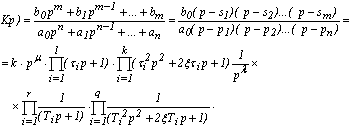
Любую систему можно представить в виде ограниченного набора типовых элементарных звеньев, которые могут быть любой природы, конструкции и назначения. Передаточную функцию любой системы можно представить в виде дробно-рациональной функции:
 (1)
(1)
Таким образом, передаточную функцию любой системы можно представить как произведение простых множителей и простых дробей. Звенья, передаточные функции которых имеют вид простых множителей или простых дробей, называют типовыми или элементарными звеньями. Типовые звенья различаются по виду их передаточной функции, определяющей их статические и динамические свойства.
Как видно из разложения, можно выделить следующие звенья:
1. Усилительное (безынерционное).
2. Дифференцирующее.
3. Форсирующее звено 1-го порядка.
4. Форсирующее звено 2-го порядка.
5. Интегрирующее.
6. Апериодическое (инерционное).
7. Колебательное.
8. Запаздывающее.
При исследовании систем автоматического управления она представляется в виде совокупности элементов не по их функциональному назначению или физической природе, а по их динамическим свойствам. Для построения систем управления необходимо знание характеристик типовых звеньев. Основными характеристиками звеньев являются дифференциальное уравнение и передаточная функция.
Рассмотрим основные звенья и их характеристики.
Усилительное звено (безынерционное, пропорциональное). Усилительным называют звено, которое описывается уравнением:
![]() (2)
(2)
или передаточной функцией:
![]() (3)
(3)
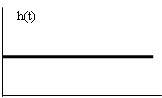
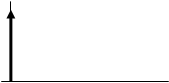
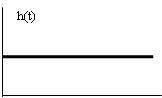
При этом переходная функция усилительного звена (рис. 1а) и его фун-кция веса (рис. 1б) соответственно имеют вид:
![]()
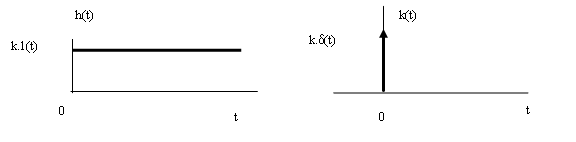
а) б)
Рис. 1
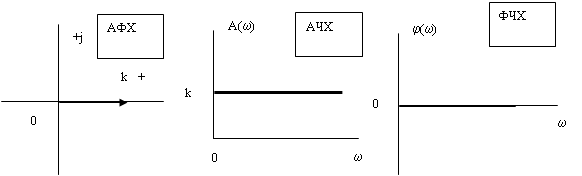
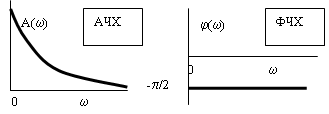
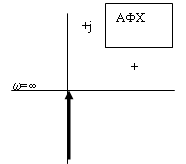
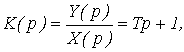
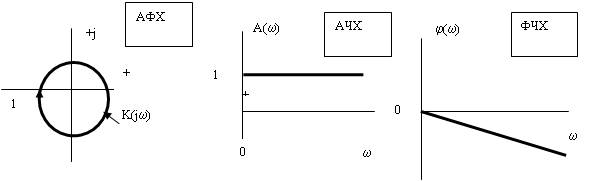
Частотные характеристики звена (рис. 2) можно получить по его передаточной функции, при этом АФХ, АЧХ и ФЧХ определяются следующими соотношениями:
![]() .
.
 |
||||
 |
||||
 |
||||
Рис. 2
Логарифмическая частотная характеристика
усилительного звена (рис. 3) определяются соотношением ![]() .
.
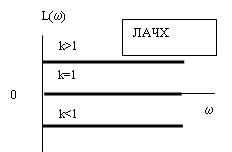
Рис. 3
Примеры звена:
1. Усилители, например, постоянного тока (рис. 4а).
2. Потенциометр (рис. 4б).
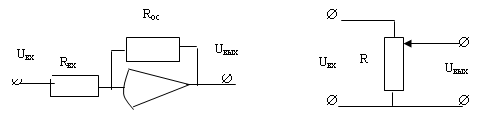
а) б)
Рис. 4
3. Редуктор (рис. 5).
 |
|||
|
|||
Рис. 5
Апериодическое (инерционное) звено. Апериодическим называют звено, которое описывается уравнением:
![]() (4)
(4)
или передаточной функцией:
 (5)
(5)
где Т – постоянная времени звена, которая характеризует его инерционность, k – коэффициент передачи.
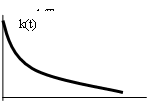
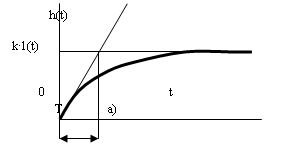
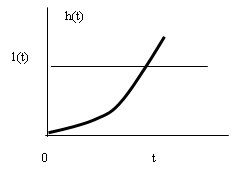
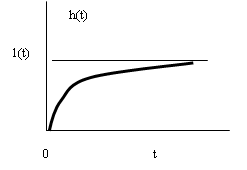
При этом переходная функция апериодического звена (рис. 6а) и его функция веса (рис. 6б) соответственно имеют вид:
 |
|||||
 |
|||||
|
|||||
Рис. 6
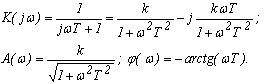
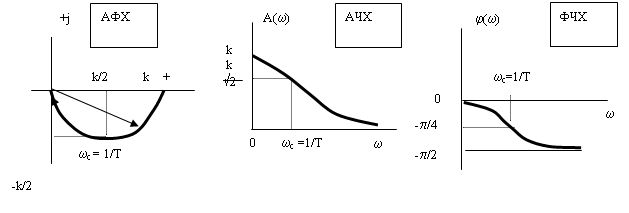
Частотные характеристики апериодического звена (рис. 7а-в) опреде-ляются соотношениями:
 |
||||
 |
||||
 |
||||
а) б) в)
Рис. 7
Логарифмические частотные характеристики звена (рис. 8) определяются по формуле
![]()
При
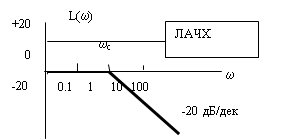
Рис. 8
Это асимптотические логарифмические характеристики, истинная характеристика совпадает с ней в области больших и малых частот, а максимальная погрешность будет в точке, соответствующей сопряженной частоте, и равна около 3 дБ. На практике обычно используют асимптотические характеристики. Их основное преимущество в том, что при изменении параметров системы (k и T) характеристики перемещаются параллельно самим себе.
Примеры звена:
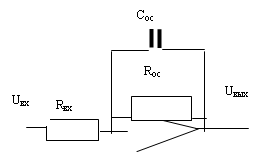
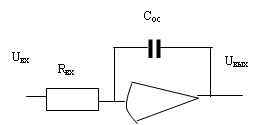
1. Апериодическое звено может быть реализовано на операционных усилителях (рис. 9).
 |
|||
 |
|||
![]() Æ Æ
Æ Æ
Рис. 9
2. Звенья на RLC-цепях (рис. 10).
|
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|||||||||
|
|||||||||
|
|||||||||
Æ Æ Æ Æ
Рис. 10
4. Механические демпферы (рис. 11).
|
|||
 |
|||
Рис. 11
Интегрирующее звено. Интегрирующим звеном называют звено, которое описывается уравнением:
 (6)
(6)
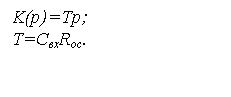
или передаточной функцией:
 (7)
(7)
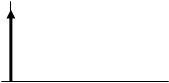
При этом переходная функция интегрирующего звена (рис. 12а) и его функция веса (рис. 12б) соответственно имеют вид:
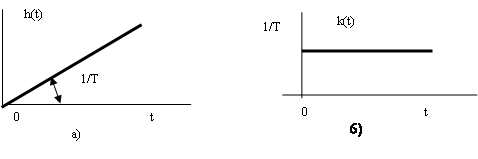
Рис. 12
Частотные характеристики интегрирующего звена (рис. 13) определяются соотношениями:

 |
||||||
 |
||||||
 |
||||||
 |
||||||
Рис. 13
Логарифмические частотные характеристики интегрирующего звена (рис. 14) определяются по формуле:
![]()
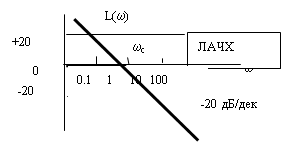
Рис. 14
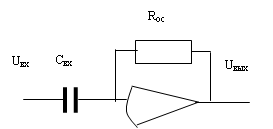
Пример звена. Интегрирующее звено может быть реализовано на операционных усилителях (рис. 15).
 |
|||
|
Æ Æ
Рис. 15
Дифференцирующее звено. Дифференцирующим называют звено, которое описывается уравнением:
![]() (8)
(8)
или передаточной функцией:
 (9)
(9)
При этом переходная функция звена (рис. 16а) и его функция веса (рис. 16б) соответственно имеют вид:
![]()
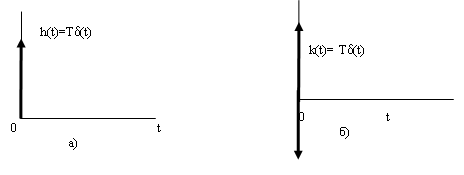
Рис. 16
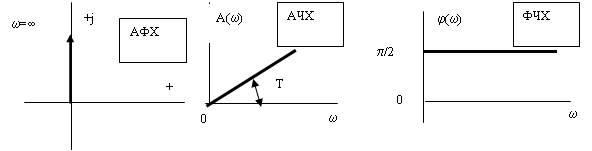
Частотные характеристики звена (рис. 17а-в) определяются соотношениями:
![]()
 |
||||
 |
||||
а) б) б)
Рис. 17
Идеальное дифференцирующее звено является физически не реализуемым. В реальных звеньях такой вид характеристики могут иметь только в ограниченном диапазоне частот.
Логарифмические частотные характеристики звена (рис. 18) определяются по формуле:
![]()
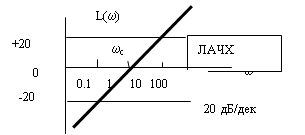
Рис. 18
Примеры звена:
1. Дифференцирующее звено может быть реализовано на операционных усилителях (рис. 19).
 |
|||
 |
Æ Æ
Рис. 19
2. Тахогенератор (рис. 20).
 Æ
Æ
|
Æ
Рис. 20
Колебательное звено. Колебательным называют звено, которое описывается уравнением:
 (10)
(10)
или передаточной функцией:
 (11)
(11)
где x – демпфирование (0 £ x £ 1).
Если x = 0, то демпфирование отсутствует (консервативное звено – без потерь), если x = 1, то имеем два апериодических звена.
При этом переходная функция звена и его функция веса (рис. 21) соответственно имеют вид:
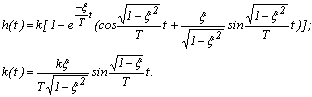 (12)
(12)
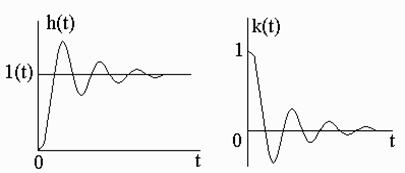 |
а) б)
Рис. 21
Амплитудно-фазовая частотная характеристика (АФХ) имеет вид (рис. 22а) и определяется соотношением

Амплитудно-частотные характеристики (АЧХ) для различных значений x имеет вид (рис. 22б) и определяется соотношением
![]()
Фазовая частотная характеристика (ФЧХ) имеет вид (рис. 22в) и определяется соотношением
![]()
Частотные характеристики колебательного звена имеют вид
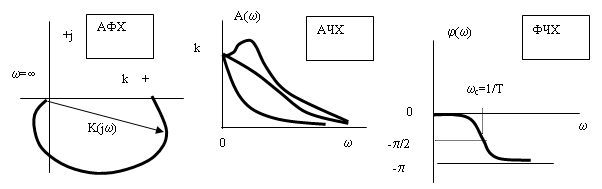
а) б) в)
Рис. 22
Логарифмические частотные характеристики звена (рис. 23) определяются по формуле:
![]()
При k = 1
![]()
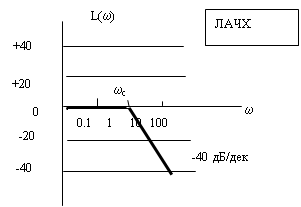
Рис. 23
Примеры звена. Колебательное звено может быть реализовано на операционных усилителях (рис. 24).
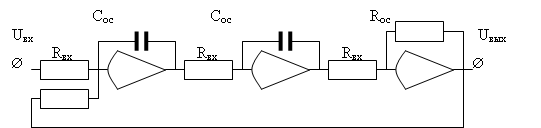
Рис. 24
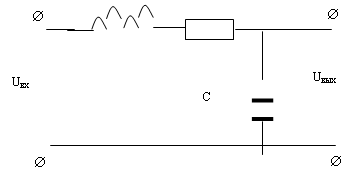
Колебательное звено на RLC-цепи (рис. 25).
|
|
|||||
 |
||||||
Рис. 25
В приведенной схеме:
С – накапливает энергию электрического поля;
L – накапливает энергию электромагнитного поля;
R – на сопротивлении происходит потеря энергии.
Запишем передаточную функцию цепи:
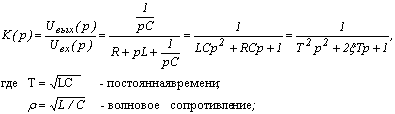
![]() – затухание
(демпфирование).
– затухание
(демпфирование).
4. Механические демпферы (рис. 26).
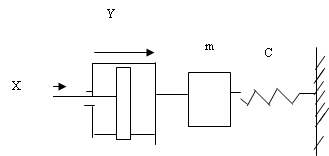
Рис. 26
Форсирующее звено. Форсирующим называют звено, которое описывается уравнением:
![]() (13)
(13)
или передаточной функцией
 (14)
(14)
где k – коэффициент передачи звена.
При этом переходная функция звена и его функция веса соответственно определяются соотношениями:
![]()
![]()
Частотные характеристики звена (рис. 27а-в) определяются соотношениями:
![]()
1
 |
||
а) б) в)
Рис. 27
Логарифмические частотные характеристики звена (рис. 28) определяются по формуле:

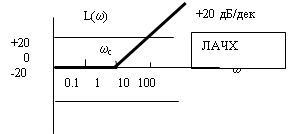
Рис. 28
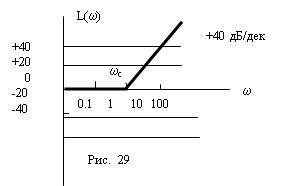
Форсирующее звено 2-го порядка. Передаточная функция форсирующего звена 2-го порядка имеет вид:
 (15)
(15)
Логарифмические частотные характеристики звена имеют вид:
Запаздывающее звено. Дифференциальное уравнение и передаточная функция запаздывающего звена имеют вид:
![]() (16)
(16)
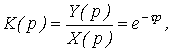 (17)
(17)
где t – время запаздывания.
В
соответствии с теоремой запаздывания ![]() . При
этом переходная функция звена и его функция веса (рис. 30а, б) соответственно
определяются соотношениями:
. При
этом переходная функция звена и его функция веса (рис. 30а, б) соответственно
определяются соотношениями:
![]()
![]()
 |
|||
 |
|||
Рис. 30
Частотные характеристики звена (рис. 31а-в) определяются соотношениями:
![]()
 |
|||
а) б) в)
Рис. 31
Устойчивые и неустойчивые звенья. В устойчивых звеньях переходный процесс является сходящимся, а в неустойчивых он расходится. Устойчивые звенья называются минимально – фазовыми. Эти звенья не содержат нулей и полюсов в правой полуплоскости корней. Неустойчивые звенья называются не минимально – фазовыми. Т. е. изменению амплитуды на ±20 дБ/дек соответствует изменение фазы на ±p/2, а ±40 дБ/дек – на ±p.
Пример 1. Построить частотные характеристики для звеньев

Для заданных передаточных функций звеньев, характеристики имеют вид (рис. 32):
 |
|||||||
 |
|||||||
 |
|||||||
 |
|||||||
Рис. 32
Идеальные и реальные звенья. Идеальные звенья физически не реализуемы, реальные звенья содержат инерционности.
 реальное интегрирующее звено;
реальное интегрирующее звено;
 реальное дифференцирующее звено;
реальное дифференцирующее звено;
 реальное форсирующее звено.
реальное форсирующее звено.
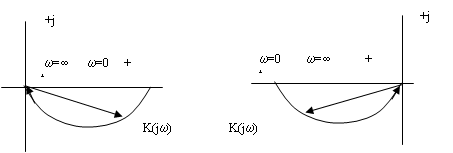
АФХ этих звеньев имеют вид (рис. 33а-в):
а) б) в)
|
||||
|
||||
Рассмотрим характеристики соединений звеньев и порядок построения логарифмических частотных характеристик соединений звеньев.
1. Определяем, из каких элементарных звеньев состоит соединение.
2. Определяем сопрягающие частоты отдельных звеньев и откладываем их по оси частот в порядке возрастания.
3. Определяем наклон низкочастотной асимптоты, используя формулу [(l-m) 20] дБ/дек (где l – количество дифференцирующих, а m- интегрирующих звеньев) и проводим ее через соответствующую сопряженную частоту.
4. Последовательно сопрягая звенья, строим характеристику соединения.
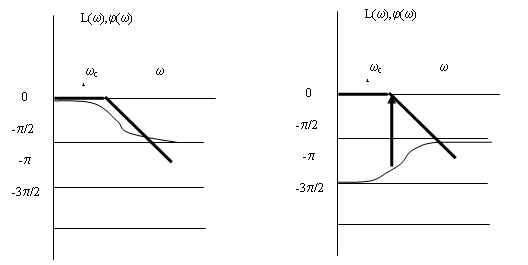
Пример 2. Построить логарифмическую частотную характеристику соединения:
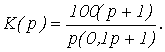
Пример 3. Построить логарифмическую частотную характеристику соединения

![]()
![]()

![]()
![]()
|

 |
|||||
 |
|||||
|
|||||
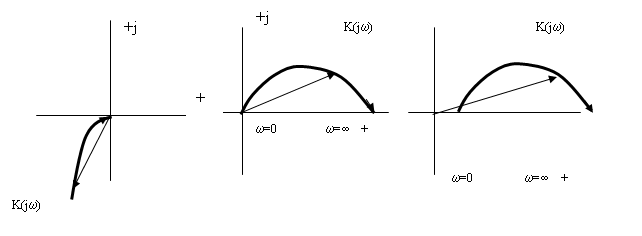
Пример 4. Построить АФХ соединения звеньев, передаточная функция которого имеет вид
Решение: Выполнив подстановку p = jw и умножив на комплексно сопряженное выражение, получим

Строим характеристику рис. 36.
|
![]() +j
+j
|
+
Рис. 36
Литература
1. Автоматизированное проектирование систем автоматического управления. / Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
2. Бойко Н.П., Стеклов В.К. Системы автоматического управления на базе микро-ЭВМ. – К.: Тэхника, 1989. –182 с.
3. В.А. Бесекерский, Е.П. Попов «Теория систем автоматического управления». Профессия, 2003 г. – 752 с.
4. Гринченко А.Г. Теория автоматического управления: Учебн. пособие. – Харьков: ХГПУ, 2000. –272 с.
5. Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.