
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Реферат: Структуры типовых регуляторов
Реферат: Структуры типовых регуляторов
Реферат
по дисциплине "Автоматическое управление и средства автоматизации"
на тему "Структуры типовых регуляторов"
Курчатов 2008
Содержание
Введение
Структуры типовых регуляторов
1. П-регулятор
2. ПД-регулятор
3. ПИ-регулятор
4. ПИД-регулятор
Заключение
Список литературы
Введение
Каждый контур регулирования обобщенно можно рассматривать как систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта.
Каждый регулятор можно охарактеризовать:
– законом, на основе которого осуществляется регулирование;
– типами входных сигналов (первичных датчиков);
– типами выходных сигналов управления (исполнительных устройств);
– способом задания установки регулирования;
– дополнительными возможностями (дополнительные функции, дополнительные входы/выходы).
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные и пропорционально-интегрально-дифференциальные регуляторы — сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы.
Рассмотрим структурные схемы автоматических регуляторов с типовыми сервоприводами, воспроизводящие основные законы регулирования методом параллельной и последовательной коррекции.
Структуры типовых регуляторов
1. П-регулятор
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
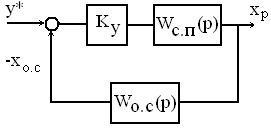
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
Wр(р) = 1 ⁄ W о.с (р); Wр (iщ) = 1 ⁄ Wо.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора xр = Kрy*, необходимо выполнить условие:
W о.с (р) = Xо.с (р) ⁄ xр (р) = 1 ⁄ Kр (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи kо.с = д = 1 ⁄ Kр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
П-регуляторы имеют орган настройки для изменения д (Kр), который служит параметром его настройки. Переходная характеристика реального П-регулятора (рис. 2) несколько отличается от идеального в начальной своей части из-за ограниченной скорости сервопривода.
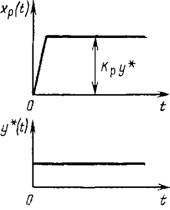
Рис. 2. Кривая переходного процесса П-регулятора
2. ПД-регулятор
Функциональная схема ПД-регулятора представлена на рис. 3, а. Дифференцирующая составляющая формируется специальным прибором — дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины.
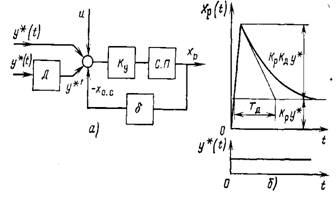
Рис. 3. ПД-регулятор: а — структурная схема; б — кривая переходного процесса
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель— привод — обратная связь формируется П-закон регулирования с коэффициентом усиления Kр. Динамическая характеристика реального ПД-регулятора имеет вид
![]()
![]()
Переходная (временная) характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3, б и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора служит Kр (степень обратной связи д); параметрами настройки дифференциатора служат коэффициент усиления Кд и постоянная дифференцирования Тд, произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
3. ПИ-регулятор
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ky—Wo.c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
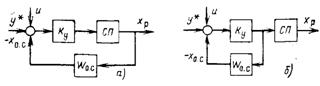
Рис. 4. Структурные схемы ПИ-регуляторов:
а — сервопривод охвачен ООС; б — сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
![]()
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора
![]()

Если принять Тд=Ти и Kр=1/Kд, получим
![]()
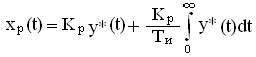
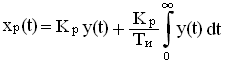 т.е. передаточную функцию ПИ-регулятора, описываемого также
дифференциальными уравнениями
т.е. передаточную функцию ПИ-регулятора, описываемого также
дифференциальными уравнениями
![]()
![]() и
и
В промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
Wp(p) = WКУУ(p)Wс.п(p), (3.3), где WКУУ(p) = 1 ⁄ Wо.с (р).
При использовании сервопривода с передаточной функцией интегрального звена Wс.п(p) = 1⁄ TР передаточная функция регулятора имеет вид
![]()
![]()
При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/Wо.с(р) = WКУУ(р) = Kр (1+TР) (3.5)
что обеспечивает обратная связь с оператором
Wо.с(р) = Kо.с/(1+TР) = д/(1+TР) (3.6)

Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
Последнее уравнение служит оператором инерционного звена первого порядка. При охвате Ку такой обратной связью оператор регулятора в целом имеет вид
Wр(р) = Kр(1+1/TиР)
Параметрами настройки ПИ-регулятора служат Kр и Ти.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), Wо.c(p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Ти численно равна подкасательной Тд к переходной кривой реального дифференцирующего звена (рис. 5).
Промышленные регуляторы имеют специальные приспособления— органы настройки для изменения Kр(д) и Ти в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения Кр и Tи можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
Kр = xр1/y* (3.7)
а Ти численно равно времени, необходимому для перемещения выходного вала сервопривода из положения xр1 до его удвоенного значения 2хр1. Отсюда второе название Tи — время удвоения выходного сигнала ПИ-регулятора xр при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что Кр/Ти определяет степень ввода интегральной составляющей в ПИ-закон регулирования
Действительно, при безграничном
увеличении Ти второй член в  последнем
уравнении стремится к нулю и регулятор из пропорционально-интегрального
переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего
звена, используемого в качестве устройства обратной связи, вырождается в
ступенчатый сигнал д (рис. 5).
последнем
уравнении стремится к нулю и регулятор из пропорционально-интегрального
переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего
звена, используемого в качестве устройства обратной связи, вырождается в
ступенчатый сигнал д (рис. 5).
4. ПИД-регулятор
Закон регулирования
Wр(р) = Kр+Kр/TиР+KдTдР (4.1)
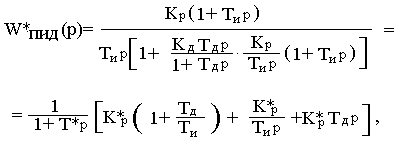
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
При последовательной коррекции
![]()
![]()
Где
![]()
При параллельной коррекции
![]()
Где

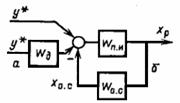
Рис. 7. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена
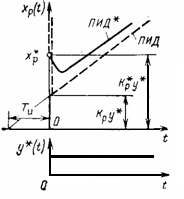
Рис. 8. Переходные характеристики ПИД-регуляторов
ПИД-регулятор имеет четыре параметра настройки: Kр, Tи, Tд и Kд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры настройки реального ПИД-регулятора K*р и T* можно определить по формулам (4.2) (4.3).
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x*р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
Заключение
Автоматические регуляторы, помимо высокой надежности, должны обладать высокой чувствительностью к изменениям входного сигнала, необходимой для точного поддержания регулируемых величин вблизи заданного значения. Для этого в составе регулятора предусматривается специальное измерительное устройство. Кроме того, автоматический регулятор должен развивать на выходе усилие, необходимое для перемещения регулирующих органов (клапанов, задвижек, шиберов), т. е. содержать в своей структуре достаточно мощный исполнительный механизм (сервопривод).
Для реализации выбранного закона регулирования и изменения параметров настройки регулятора в необходимых пределах в его состав должны входить устройства формирования закона регулирования и изменения (коррекции) параметров настройки. Необходимо также иметь возможность изменения в широких пределах заданного значения регулируемой величины, с которым сравнивается ее текущее значение. Это требование предусматривает наличие задатчика ручного или автоматического управления (ЗУ) в составе регулятора. Выполнение перечисленных требований возможно лишь при использовании автоматических регуляторов непрямого действия.
Список литературы
Плетнев Г.П. Автоматическое управление и защита теплоэнергетических установок электростанций: Учебник для техникумов. – 3-е изд., перераб. – М.: Энергоатомиздат, 1986.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд-во «Наука», 1966.
Михайлов В.С. Теория управления. – К.: высш. шк. Головное изд-во,1988.
Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. И доп. – К.: высш. шк. Головное изд-во, 1989.