
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Проектирование зубчатого и кулачкового механизмов
Курсовая работа: Проектирование зубчатого и кулачкового механизмов
РЕФЕРАТ
Курсовой проект: 32 с, 6 таблиц, 3 приложения на листах формата А1.
Объект проектирования и исследования – механизм: зубчатый, кулачковый.
Цель курсового проекта исследовать и спроектировать зубчатый и кулачковый механизм.
В проекте сделано: синтез планетарной передачи и эвольвентного зубчатого зацепления с угловой коррекцией, синтез кулачкового механизма с вращательным движением толкателя.
В главной части сделаны необходимые расчеты для исследования зубчатого и кулачкового механизма по которым было построено черчение составных частей данного механизма.
СОДЕРЖАНИЕ
Введение
1 Кинематическое исследование рычажного механизма
1.1 Построение плана механизма
1.2 Построение плана скоростей
1.3 Построение плана ускорения
1.4 Определение сил реакции и моментов сил инерции с использованием Метода Бруевича
1.5 Определение сил реакции и моментов сил инерции с использованием Метода Жуковского
2 Синтез зубчатого редуктора
2.1 Расчет геометрических параметров зубчатой передачи 1-2
2.2 Проверка качества зубьев и зацепления
2.3 Расчет контрольных размеров
2.4 Подбор чисел зубьев планетарного механизма
2.5 Кинетический анализ планетарного механизма
3 Синтез кулачкового механизма с вращательным движением
3.1 Расчет законов движения толкателя
3.2 Построение теоретического и действительного профиля кулачка
Выводы
Перечень ссылок
Приложение А
Приложение В
Приложение С
ВВЕДЕНИЕ
Целью этого курсового проекта является получение студентами навыков в проектировании комплексных механизмов, тоесть таких, которые состоят с нескольких частей. В этой работе таким механизмом является привод конвеера, который состоит из рычажного, зубчатого механизмов и кулачкового механизмов.
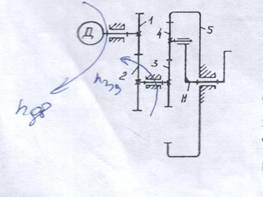
Рис.1 Кинематическая схема редуктора
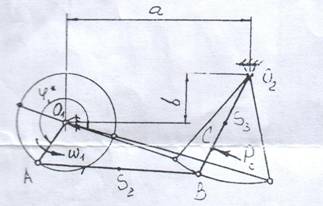
Рис.2 Кинематическая схема стержневого механизма
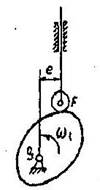
Рис.3 Схема кулачкового механизма
Исходные данные
Частота вращение двигателя
![]() =1080
об/хв
=1080
об/хв
Частота Вращения главного вала
![]() =92 об/хв
=92 об/хв
Модуль колёс зубчатого механизма m = 6 мм
Количество сателитов k =3
Количество зубьев колес: 1, 2 ![]() = 14; z2
= 30
= 14; z2
= 30
Фазовые углы вращения кулачкового механизма φу=100 град;
φдс=40 град;
φв=70 град;
Ход толкателя кулачкового механизма h=74мм;
Эксцентриситет e =28 мм;
Тип диаграммы 2
1 СИНТЕЗ ЗУБЧАСТОГО РЕДУКТОРА
1.1 Расчет геометрических параметров зубчатой передачи 1-2
Проектируем зацепление со смещением 1 – 2. Основними исходными данными при проектировании зубчатых передач является расчетный модуль m=6мм, и числа зубьев колес z1 = 14, z2 = 30. Параметры исходного контура коэффициент высоты головки h*a=1,0; коэффициент радиального зазора c*=0,25; угол профиля исходного контура α=20°.
Коэффициент смещения исходного контура для первого и второго колеса
Х1 = 0,536 та Х2 = ХΣ - Х1 = 0,976 – 0,536 = 0,44 (выбираются согласно от чисел зубьев колёс z1 та z2).
Рассчитываем параметры для неравносмещенного зацепления.
Шаг по делительной окружности:
p = π∙m = 3,1416∙6 = 18,85 мм.
Радиусы делительных окружностей:
r1=0,5∙m∙z1=0,5∙6∙14=42 мм;
r2=0,5∙m∙z2=0,5∙6∙30=90 мм.
Радиусы основных окружностей:
rb1=r1∙cosα=42∙0,93969=39,467 мм;
rb2=r2∙cosα=90∙0,93969=84,572 мм.
Шаг по основной окружности:
pb = p∙cosα=18,85 ∙0,93969=17,713 мм.
Угол зацепления:
inv αw = ![]() + inv α = 0,031052;
+ inv α = 0,031052;
α = αw = 25,278°;
Радиусы начальных окружностей:
rw1= 0,5∙
m∙z1∙ = 0,5∙6∙14∙1,0392=43,646
мм;
= 0,5∙6∙14∙1,0392=43,646
мм;
rw2= 0,5∙
m∙z2∙![]() = 0,5∙6∙30∙1,0392=
93,528 мм.
= 0,5∙6∙30∙1,0392=
93,528 мм.
Межосевое расстояние:
aw = rw1 + rw2 =43,646 +93,528=137,174 мм.
Радиусы окружности впадин:
rf1 = m∙ (0,5∙z1 – h*a – c*) = 6 ∙ (0,5∙14 – 1,0 – 0,25)= 37,716 мм;
rf2 = m∙ (0,5∙z1 – h*a – c*) = 6∙ (0,5∙30 – 1,0 – 0,25) = 85,140 мм.
Высота зуба определяется с условием, что в неравносмещенном и нулевом зацеплениях радиальный зазор равняется с*∙m. Тогда:
h = aw – rf1 – rf2 - с*∙m =137,174 –37,716 – 85,140 – 0,25∙6 = 12,818 мм;
Радиусы окружности вершин:
ra1 = rf1 + h = 37,716 +12,818 =50,534 мм;
ra2= rf2 + h = 85,140 +12,818 = 97,958 мм.
Толщины зубьев по делительным окружностям:
S1=m∙ (0,5∙π+2∙x1∙tgα)=6∙ (0,5∙3,1416+2∙0,536 ∙0,9396) = 11,766 мм;
S2= m∙ (0,5∙π+2∙x2∙tgα)= 5∙ (0,5∙3,14162+2∙0,44 ∙0,9396 )= 11,347 мм.
Толщины зубьев по основным окружностям:
Sb1 = 2∙rb1∙ ( ) = 2∙39,467 ∙ (
) = 2∙39,467 ∙ (![]() )= 12,233 мм;
)= 12,233 мм;
Sb2 = 2∙rb2∙ ( ) = 2∙84,572 ∙ (
) = 2∙84,572 ∙ (![]() )=13,183 мм.
)=13,183 мм.
Толщины зубьев по начальным окружностям:
Sw1 = 2∙rw1∙ (![]() -inv αw)=2∙43,646 ∙(
-inv αw)=2∙43,646 ∙(![]() –
–![]() )=
)=
= 10,817 мм;
Sw2=2∙rw2∙(![]() -inv αw)=2∙93,528 ∙(
-inv αw)=2∙93,528 ∙(![]() –
–![]() )=
)=
=8,771 мм.
Шаг по начальной окружности:
![]() мм.
мм.
Необходимо проверить, выполняется ли равенство: Sw1+Sw2 = Pw.
Допускается погрешность ∆≤0,02 мм.
Sw1+ Sw2=10,817 +8,771 =![]() мм.
мм.
Имеем погрешность ∆=0 мм.
Толщина зубьев по окружностям вершин:
Sa1=2∙ra1∙( -
inv αa)
-
inv αa)
Угол профиля на окружностях вершин αa определяется по фомуле:
 ;
;
![]()
αa1 = 38,647 ; inv αa1=0,125120;
Sa1=2∙ra1∙
( - inv αa1)=2∙
- inv αa1)=2∙![]() ∙(
∙( ![]() 0,125120)
0,125120)
= 3,017 мм
![]()
αa2=30,305; inv αa2=0,0555546;
Sa2=2∙ra2∙(![]() -
inv αa2)=2∙
-
inv αa2)=2∙![]() ∙(
∙( ![]() ) = 4,388 мм.
) = 4,388 мм.
Коэффициент перекрытия:

Радиус кривизны эвольвенты в точке В1:
ρa1=N1B1=![]() 31,56 мм
31,56 мм
ρa2=N2B2=![]() 49,429 мм
49,429 мм
Длина линии зацепления:
N1N2=aw∙sinαw=![]() ∙
∙![]() =58,573 мм.
=58,573 мм.
Результаты расчетов заносят в табл. 2.1
Таблица 1.1 – Расчетные параметры нулевого и неравносмещенного зацепления
| Параметры | Тип зацепления |
|
|
| Нулевое зацепление | Неравносмещенное зацепление |
|
|
|
z1 |
14 | 14 |
|
|
z2 |
30 | 30 |
|
| m,мм | 6 | 6 |
|
| P, мм | 18,85 | 18,85 |
|
|
Pb, мм |
17,713 | 17,713 |
|
|
r1, мм |
42 | 42 |
|
|
r2, мм |
90 | 90 |
|
|
rb1, мм |
39,467 | 39,467 |
|
|
rb2, мм |
84,572 | 84,572 |
|
|
X1, мм |
0 | 0,536 |
|
|
X2, мм |
0 | 0,44 |
|
|
αw,град |
20 | 25,278 |
|
|
rw1, мм |
42 | 43,646 |
|
|
rw2, мм |
90 | 93,528 |
|
|
aw, мм |
132 | 137,174 |
|
|
Pw, мм |
18,85 | 19,588 |
|
|
rf1, мм |
34,5 | 37,716 |
|
|
rf2, мм |
82,5 | 85,14 |
|
| h, мм | 13,5 | 12,818 |
|
|
ra1, мм |
48 | 50,534 |
|
|
ra2, мм |
96 | 97,958 |
|
|
S1, мм |
9,425 | 11,766 |
|
|
S2, мм |
9,425 | 11,347 |
|
|
Sw1, мм |
9,425 | 10,817 |
|
|
Sw2, мм |
9,425 | 8,771 |
|
|
Sb1, мм |
10,033 | 12,233 |
|
|
Sb2, мм |
11,377 | 13,183 | |
|
Sa1, мм |
3,876 | 3,017 | |
|
Sa2, мм |
4,424 | 4,338 | |
| ε | 1,558 | 1,265 | |
1.2 Проверка качества зубьев и зацепления
Проверка на не заострение:
Sa≥0,4∙m=0,4∙6=2,4 мм;
Sa1=3,017мм;
Sa2=4,338мм.
Проверка на отсутствие подрезания:
0,5∙z1∙sin2α ≥ h*a – x1;
0,5∙14∙0,1833 ≥ 1 – 0,519;
1,2831≥ 0,481.
0,5∙z2∙sin2α ≥ h*a – x2;
0,5∙30∙0,1833 ≥ 1 – 0,418;
2,7495≥ 0,582.
Для обеспечения плавности зацепления коэффициент перекрытия для силовых передач требуется принимать ε ≥ 1,15. За нашими подсчетами имеем
ε = 1,265
1.3 Расчет контрольных размеров
Размер постоянной хорды:
Sc=S∙cos2α;
Sc1=S1∙cos2α = 11,766∙0,883= 10,389мм;
Sc2=S2∙cos2α = 11,347∙0,883= 10,019мм.
Расстояние от окружности вершин до постоянной хорды:
![]()
![]()
![]()
Длина общей нормали:
W=Pb∙n∙Sb,
где n – количество шагов, охватываемых скобой (количество впадин).
n1=1, n2=3
W1=Pb1∙n+Sb1= 17,713∙1+12,233= 29,946 мм;
W2=Pb2∙n+Sb2=17,713∙3+13,183= 66,322мм.
1.4 Подбор чисел зубьев планетарного механизма
Подбор чисел зубьев колес z1, z2, z3, z4 и z5 планетарного механизма производится на ПК в программе ТММ.ЕХЕ.
Алгоритм подбора чисел зубьев колес z3, z4, z5 при числе сателлитов k=3 следующий.
Используя метод Виллиса,
выражаем ![]() через
числа зубьев колес:
через
числа зубьев колес:
 , откуда
, откуда
Полученное число ![]() меняем рядом
простых дробей со знаменателем 16, 17, 18, … . Числитель каждой дроби получаем,
перемноживши принятий знаменатель на
меняем рядом
простых дробей со знаменателем 16, 17, 18, … . Числитель каждой дроби получаем,
перемноживши принятий знаменатель на ![]() и откинув дробную часть
и откинув дробную часть ![]() … .
… .
Рассматриваем дробь с
наименьшим знаменателем. Приняли ![]() равным знаменателю, а
равным знаменателю, а ![]() равным
числителю, определяем
равным
числителю, определяем ![]() с условия соосности.
с условия соосности.
![]() откуда
откуда  .
.
Если ![]() получаем не целым, то
числитель увеличиваем на 1 и опять определяем
получаем не целым, то
числитель увеличиваем на 1 и опять определяем ![]() .
.
Проверяем передаточное отношение, задавшись допустимой его относительной погрешностью D.
Для этого считаем  и сравнивая
его с заданным
и сравнивая
его с заданным
 :
:  .
.
Если неравность выполняется, то проверяем условия составления:
![]() ,
,  ,
,
т.е. ![]() ,
,
где k – число сателлитов,
Е – любое целое число.
Для каждого вариант числа зубьев проверяем возможность установки на водило два, три или четыре сателлита.
После знаменатель дроби
увеличиваем на 1 (переходим до исследования следующей дроби) и весь расчет
повторяется. В такой способ можно перебрать множество дробей и получить набор
вариантов ![]() и
соответствующим им значений «k»,
которые записываются в форме таблицы 1.
и
соответствующим им значений «k»,
которые записываются в форме таблицы 1.
Таблица 1.2 - Значения ![]()
| № |
|
|
|
|
|
| 1 | 20 | 35 | 90 | 2 | 5,5 |
| 2 | 21 | 37 | 95 | 2,4 | 5,524 |
| 3 | 22 | 38 | 98 | 2,3,4 | 5,455 |
| 4 | 23 | 40 | 103 | 2,3 | 5,478 |
| 5 | 24 | 42 | 108 | 2,3,4 | 5,5 |
| 6 | 25 | 43 | 111 | 2,4 | 5,44 |
Таблица 1.3 - Выбор варианта набора чисел
| № |
Z1 |
Z2 |
Z3 |
Z4 |
K |
Uф |
| 3 | 22 | 38 | 98 | 0 | 2,3,4 | 5,455 |
Таблица 1.4 -Угловая скорость зубчатого колеса и водила рад/с
|
ω 1 |
ω 2 |
ω 3 |
ω 4 |
ω Н |
| 113,098 | -32,739 | 0 | 0 | 20,735 |
В связи с тем, что с ростом знаменателя растет числитель растут габариты механизма, при проектировании механизма целесообразным считаем диапазон знаменателя от 17 до 27.
С полученной таблицы выбираем оптимальный вариант из взгляда наименьших габаритов механизма с заданным числом сателлитов «k» и за условия отсутствия подрезания зубьев всех зубчатых колес.
Избраний вариант с k=3 и проверяется на выполнения условия соседства.
1.5 Кинематический анализ планетарного механизма
Определим радиусы начальных окружностей:
r1 = d1/2 = m·Z1/2= 6·14/2=84/2 = 42 мм
r2 =d2/2 = m·Z2/2= 6·30/2=180/2 = 90 мм
r3 = d3/2 = m·Z3/2= 6·22/2 =132/2 = 66 мм
r4 = d4/2 = m·Z4/2= 6·38/2=228/2 = 114 мм
r5 = d5/2 = m·Z5/2= 6·98/2 =588/2 = 294 мм.
Выбираем масштабный
коэффициент: ![]() . С учетом масштабного
коэффициента построим кинематическую схему редуктора. На кинематической схеме
условно изображаем один сателлит.
. С учетом масштабного
коэффициента построим кинематическую схему редуктора. На кинематической схеме
условно изображаем один сателлит.
Вычислим скорость точки А, принадлежащей окружности колеса 1:
![]() ,
,
Где ![]() .
.
Va = ω1∙![]() 151∙
151∙![]()
Выбираю ![]() .
.
Скорость точки А является
касательной к начальной окружности колеса 1 ![]() – вектор изображающий скорость точки А. Отрезок Аа - линия распределения скоростей
точек колеса 1. Из точки В провожу горизонтальную линию. Из точки а через точку
– вектор изображающий скорость точки А. Отрезок Аа - линия распределения скоростей
точек колеса 1. Из точки В провожу горизонтальную линию. Из точки а через точку ![]() провожу отрезок до пересечения с
горизонтальной линией, проходящей через точку B. Полученный отрезок аb– линия распределения скоростей точек колес 2 и 3.
провожу отрезок до пересечения с
горизонтальной линией, проходящей через точку B. Полученный отрезок аb– линия распределения скоростей точек колес 2 и 3.
Строю диаграмму угловых скоростей:
![]() .
.
Переношу на диаграмму угловых скоростей точку Р и распределения линейных скоростей параллельно самим себе.
Получаем угловые скорости колес графическим методом:
![]() ;
;
![]()
![]()
![]()
Проверим значения угловых скоростей аналитическим методом – методом Виллиса.
Механизм состоит из последовательно соединенных двух механизмов – простого и планетарного.
![]()
![]() .
.
По методу Виллиса всем
звеньям планетарного механизма дополнительно сообщаем скорость равную ![]() . Получаем
обращенный механизм.
. Получаем
обращенный механизм.
Передаточное отношение в обращенном механизме:
С другой стороны
![]()
Тогда
![]()
Таким образом, получаем:
![]() ;
;
![]()
![]()
![]() ;
;
Чтобы найти ω4,
определим передаточное отношение ![]() :
:
![]()
с другой стороны
![]()
Таким образом, получаем
![]()
Сравнение угловых скоростей, полученных аналитически и графически, представлено в таблице 3.6.
Таблица 1.5 – Сравнение данных аналитического и графического методов
| Метод определения |
ω1, рад/с |
ω2,3, рад/с |
ω4, рад/с |
ωН, рад/с |
| Аналитический |
|
|
|
|
| Графический |
|
|
|
|
| Расхождение, % | 0 | 0, 02 | 0,01 | 0,01 |
2 СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА С ВРАЩАТЕЛЬНЫМ ДВИЖЕНИЕМ
Исходные данные:
Длина коромысла кулачкового механизма h=74мм
Фазовые углы поворота кулачка:
Угол удаления jу=100°
Угол дальнего стояния jд.с=40°
Угол возврата jв=70°
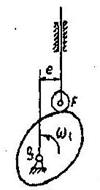
Рис.4. Схема кулачкового механизма
2.1 Расчет законов движения толкателя и построение их графиков
Закон изменения аналога ускорения поступательно движущегося толкателя на этапе удаления и возвращения задан в виде отрезков наклонных прямых.
В данном случае на этапе удаления
Интегрируя получаем выражение аналога скорости
и перемещения толкателя
Постоянные интегрирования
С1 и С2 определяем из начальных условий: при ![]()
![]() и
и ![]() , следовательно, С1
= 0 и С2 = 0.
, следовательно, С1
= 0 и С2 = 0.
При ![]() имеем
имеем ![]() , поэтому из выражения
получаем:
, поэтому из выражения
получаем:

Подставив найденное значение а1 в выражение окончательно получаем:

Аналогичным образом,
введя новую переменную ![]() получаем закон изменения аналога
ускорения на этапе возвращения в виде
получаем закон изменения аналога
ускорения на этапе возвращения в виде  Интегрируя последовательно
получим:
Интегрируя последовательно
получим:

Постоянные С3
и С4 определяются из начальных условий: при ![]()
![]() и
и ![]() , следовательно, С3 = 0
и С4 = Н. Когда
, следовательно, С3 = 0
и С4 = Н. Когда ![]() , поэтому
, поэтому  Таким образом, для этапа
возвращения имеем:
Таким образом, для этапа
возвращения имеем:

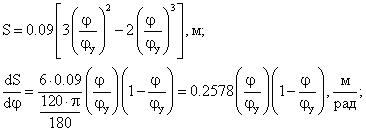
На этапе удаления записываем уравнение для определения перемещения, аналог скорости и ускорения толкателя:
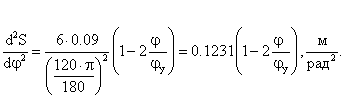
На этапе возвращения
По найденным выражениям вычисляются значения перемещения, аналогов скорости и ускорения толкателя. Результаты вычислений представим в виде таблицы 3.1. В данной курсовой работе углы удаления jу и возвращения jв разбивались на 10 равных интервалов каждый. Целесообразно определить максимальные значения скорости и ускорения толкателя на этапах удаления и возвращения. Для этого находим угловую скорость кулачка
![]() Далее определяем максимальные значения скорости и
ускорения толкателя: на этапе удаления:
Далее определяем максимальные значения скорости и
ускорения толкателя: на этапе удаления:
![]()
![]()
![]()
На этапе возвращения
Таблица 2.1 – Значения параметров движения поступательно движущегося толкателя
| На этапе удаления |
|
||||||||||
| Положение |
|
|
|
|
|
|
|||||
| 0 | 0,0 | 0 | 0,0972 | 0,0000 | 0.0000 |
|
|||||
| 1 | 10,0 | 0.1 | 0,0972 | 0,0170 | 0.0015 |
|
|||||
| 2 | 20,0 | 0.2 | 0,0972 | 0,0339 | 0.0059 |
|
|||||
| 3 | 30,0 | 0.3 | 0,0972 | 0,0509 | 0.0133 |
|
|||||
| 4 | 40,0 | 0.4 | 0,0972 | 0,0678 | 0.0237 |
|
|||||
| 5 | 50,0 | 0.5 | -0,0972 | 0.0848 | 0.0370 |
|
|||||
| 6 | 60,0 | 0.6 | -0,0972 | 0.0678 | 0.0503 |
|
|||||
| 7 | 70,0 | 0.7 | -0,0972 | 0.0509 | 0.0607 |
|
|||||
| 8 | 80,0 | 0.8 | -0,0972 | 0.0339 | 0.0681 |
|
|||||
| 9 | 90,0 | 0.9 | -0,0972 | 0.0170 | 0.0725 |
|
|||||
| 10 | 100,0 | 1 | -0,0972 | 0.0000 | 0.0740 |
|
|||||
| На этапе возвращения | |||||||||||
| Положение |
|
|
|
|
|
|
|||||
| 11 | 140 | 0 | -0.1983 | 0.0000 | 0.0740 |
|
|||||
| 12 | 147 | 0.1 | -0.1983 | -0.0242 | 0.0725 |
|
|||||
| 13 | 154 | 0.2 | -0.1983 | -0.0485 | 0.0681 |
|
|||||
| 14 | 161 | 0.3 | -0.1983 | -0.0727 | 0.0607 |
|
|||||
| 15 | 168 | 0.4 | -0.1983 | -0.0969 | 0.0503 |
|
|||||
| 16 | 175 | 0.5 | 0.1983 | -0.1211 | 0.0370 |
|
|||||
| 17 | 182 | 0.6 | 0.1983 | -0.0969 | 0.0237 |
|
|||||
| 18 | 186 | 0.7 | 0.1983 | 0.0727 | 0.0133 |
|
|||||
| 19 | 196 | 0.8 | 0.1983 | -0.0485 | 0.0059 |
|
|||||
| 20 | 203 | 0.9 | 0.1983 | -0.0242 | 0.0015 |
|
|||||
| 21 | 210 | 1 | 0.1983 | 0.0000 | 0.0000 |
|
|||||

2.2 Построение профилей кулачка
Центровой профиль кулачка строится методом обращения движения. Кулачек останавливается, а толкатель совершает плоскопараллельное движение. В первую очередь я перенес десять положений толкателя с этапа определения минимального радиуса центрового профиля кулачка. Затем провел окружность радиуса r0 =0.5*h=0.5*82=41 с центром в точке О. Принимаем r0=42. Далее от луча А0O в направлении, противоположном действительному вращению кулачка отложил последовательно углы φу, φд, φв. Затем эти углы делятся на десять равных частей. Через каждую точку 1/,2/,3/ … n/ проводятся дуги радиуса А0В0. Через каждую точку Вi проводится дуга окружности с центром в точке О до пересечения с дугой проведенной из каждой Аi. Точки пересечения B/1,B/2… B/n являются точками центрового профиля кулачка, они соединяются плавной кривой. Для получения практического профиля кулачка проводят радиусом ролика rрол=0.2*r0=0.2*42=8,4 , множество окружностей с центрами в точках центрового профиля. Огибающие кривые семейства этих окружностей дают профили пазового кулачка. Радиус ролика выбирается самостоятельно.
ВЫВОДЫ
В курсовом проекте для расчета механизмов использовано два метода:
1) аналитический;
2) графический;
Аналитический метод позволяет нам более точно произвести расчет величин. Суть этого метода состоит в выполнении расчета по формулам. Но у этого метода есть свой недостаток: он требует большего внимания и времени, в отличие от графического метода.
Графический метод значительно проще. Он занимает меньше времени на вычислении искомых величин. Графический метод нагляден, но он имеет большую погрешность, чем аналитический.
В первой части был выполнен синтез зубчатой передачи: расчитаны параметры зубчатого зацепления, постоена картина зубчатого зацепления одной зубчатой передачи, построен планетарний механизм с расчётам его линейных и угловых скоростей графическим и аналитическим методами с допустимою погрешностью не более 5%.
В третьей части был выполнен анализ кулачкового механизма, построены графики ускорений, скоростей и угла поворота толкателя. Начерчена кинематическая схема кулачкового механизма.
Для того чтобы проконтролировать точность измерений и расчетов в курсовом проекте применялись программы для ПК: ТММ.ЕХЕ.
ПЕРЕЧЕНЬ ССЫЛОК
1. Гордиенко Э.Л., Кондрахин П.М., Стойко В.П. Методические указания и программы к кинематическому расчету механизмов на ПМК типа «Электроника» - Донецк: ДПИ, 1991. – 44 с.
2. Кондрахин П.М., Гордиенко Э.Л., Кучер В.С. и др. Методические указания по проектированию и динамическому анализу механизмов – Донецк: ДонНТУ, 2005. – 47 с.
3. Кучер В.С., Гордиенко Э.Л., Пархоменко В.Г. Методические указания к проектированию кулачковых механизмов – Донецк, 2003. – 30 с.
4. Мазуренко В.В. Методичні вказівки до оформлення курсових проектів (робіт) – Донецьк: ДонДТУ, 2000. – 15 с