
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Проектирование исполнительного механизма с двигателем и одним выходным валом
Курсовая работа: Проектирование исполнительного механизма с двигателем и одним выходным валом
Задание на курсовой проект
Цель работы
Спроектировать исполнительный механизм с двигателем и одним выходным валом
Исходные данные
1. Вариант кинематической схемы
2. Момент на выходном валу Мвых, Н
3. Частота вращения nвых, об/мин
4. Точность передачи по углу Δφ, угл. мин
СОДЕРЖАНИЕ
Задание на курсовой проект
Введение
1.Техническое предложение
1.1 Анализ задания
1.2 Разработка функциональной схемы механизма
2 Выбор двигателя
3 Разработка кинематической схемы
3.1 Передаточное отношение
3.2 Кинематическая схема
3.3 Определение числа зубьев
3.4 Процент ошибки
3.5 Уточнение мощности двигателя
4. Расчет размеров зубчатых колес
4.1 Расчет крутящих моментов
4.2 Выбор материала
4.3 Расчет модулей
4.3.1 Расчет модуля на выкрашивание
4.3.2 Расчет модуля на изгиб
4.3.3 Выбор модуля
4.4 Расчет размеров зубчатых колес
5 Расчет валов
5.1 Определение усилий
5.2 Компоновочная схема
5.3 Расчет длины вала
5.4 Расчет диаметра предпоследнего вала
5.4.2 Расчет диаметра вала
5.5 Расчет диаметра выходного вала
5.5.1 Расчетные схемы. Построение Эпюр
5.5.2 Расчет диаметра выходного вала
6. Расчет и выбор подшипника
6.1 Выбор подшипника
6.2 Расчет подшипника на долговечность
7 Расчет элементов крепления
7.1 Расчет диаметра штифта
7.1.1 Расчет на срез
7.1.2 Расчет на изгиб
8. Расчет точности
9. Определение оценки уровня унификации
Заключение
Список использованных источников
ВВЕДЕНИЕ
Темой курсового проекта является проектирование исполнительного механизма, состоящего из двигателя и редуктора. Такие механизмы находят широкое применение в приборах и устройствах летательных аппаратов для дистанционной передачи измеряемых параметров (указателя высоты, скорости; указатели авиагоризонта, курсовой системы), а так же для поддержания параметров на определенном уровне (механизмы управления рулями летательного аппарата, гидростабилизаторы и т.д.)
Проектирование механизма это творческий процесс, включающий:
- установление принципа действия и режимов работы механизма;
- выбор прототипа и критического анализа существующих решений ;
- выяснения сил и моментов, действующих на элементы механизма, и характер их изменения во времени;
- выбор материала для изготовления деталей механизма с учетом технологии их изготовления и экономической целесообразности выбора данной конструкции;
- определение формы и размеров всех деталей механизма с учетом технологии их изготовления и экономической целесообразности выбора данной конструкции;
- выполнение всех необходимых расчетов.
При этом возможны разнообразные решения. Задача конструктора заключается в том, чтобы спроектированный механизм имел минимальные габаритны и массу, был прост ив изготовлении, сборке, регулировке, дешев. Узлы детали должны обладать необходимой прочностью, жесткостью, малыми потерями на трение, технологичность.
1 ТЕХНИЧЕСКОЕ ПРЕДЛОЖЕНИЕ
1.1 Анализ задания
Требуется разработать исполнительный механизм с заданным выходным моментом, частотой вращения, и точностью передачи. Двигатель на входе редуктора создает входной момент с частотой вращения двигателя. При помощи редуктора преобразуются требуемые выходные параметры проектируемого механизма на выходном валу. Двигатель и редуктор соединены муфтой.
1.2 Разработка функциональной схемы механизма
Проектируемый механизм (рис.1) состоит из двигателя 1, соединенного с редуктором 3 муфтой 2 и выходным валом 4.
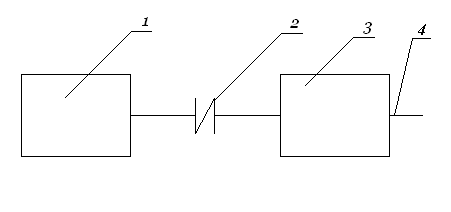
Рисунок 1 – Функциональная схема механизма
2 Выбор двигателя
Для выбора электродвигателя определяют требуемую его мощность и частоту вращения выходного вала редуктора. При постоянной скорости выходного вала по известному моменту на выходном валу Мвых (Н·см) и частоте вращения nвых (об/мин) находим мощность на выходном валу (Вт)
Nвых =  , Вт (1)
, Вт (1)
Nвых = ![]() Вт
Вт
Зная мощность на выходном валу Nвых, определяем мощность двигателя Nдв по формуле
Nдв =  , Вт (2)
, Вт (2)
где Кз = 1.5 - коэффициент запаса, ηо = 0.85- общий КПД механизма.
Nдв =  Вт
Вт
Зная мощность двигателя, из каталога выбираем двигатель. При этом мощность двигателя должна быть в Ки раз больше расчётной мощности Nдв.
Выбираем двигатель СЛ 261 со следующими характеристиками:
Мощность__________________24 Вт
Частота вращения___________3600 об/мин
Номинальный момент________6.5 Н·см
Момент инерции якоря_______0.2 кг·см2
Пусковой момент____________0 Н·см
Габариты:
D = 70мм
L = 115мм
d = 6мм
l = 9мм
Внешний вид двигателя представлен на рисунке 2.
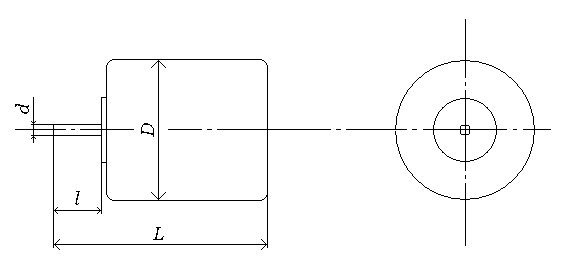
Рисунок 2 - Внешний вид и двигателя СЛ 261
3 РАЗРАБОТКА КИНЕМАТИЧЕКОЙ СХЕМЫ
3.1 Передаточное отношение
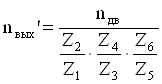
Общее передаточное число механизма определяется по следующей формуле:
 (3)
(3)
где nдв - частота вращения двигателя.
Также общее передаточное число состоит из ряда сомножителей, число которых зависит от числа передач, составляющих механизм:
![]() (4)
(4)
 ,
,  ,
, 
где U12, U34, U56 - передаточные числа передач, значения которых:
U12 = U1 = 2
U34 = U2 = 3
U56 = U3 = 6
3.2 Кинематическая схема
На основе полученных данных выбираем схему редуктора, представленную на рис. 3.
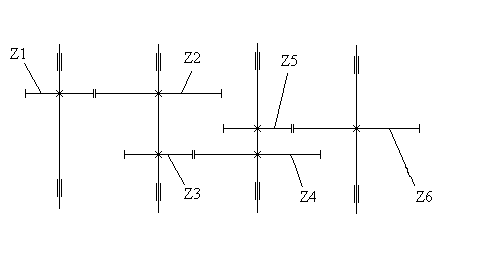
Рисунок 3 - Кинематическая схема редуктора
3.3 Определение числа зубьев
Из условия, что для цилиндрической прямозубой передачи минимальное число зубьев шестерни равно 17, выбираем числа зубьев ZШ шестерней:
Z1 = 17
Z3 = 17
Z5 = 17
Число зубьев ZКi колеса i- той ступени с передаточным отношением Ui вычисляем по формуле:
![]() (5)
(5)
Z2 = 17 · 2 = 34
Z4 = 17 · 3 = 51
Z6 = 17 · 6 = 102
3.4 Процент ошибки
Процент ошибки между заданными числами оборотов и полученными в результате расчётов не должен превышать 2% (заданная ошибка). Процент ошибки вычисляется по следующей формуле:
 (6)
(6)
 (7)
(7)
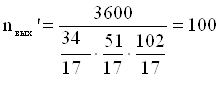 об/мин
об/мин

3.5 Уточнение мощности двигателя
На основе кинематической схемы выполняется расчет уточнения мощности двигателя Nдв по формуле (2)
Nдв =  Вт (8)
Вт (8)
где ![]() =
=![]() n
n![]()
![]() m
m![]()
![]() - общий КПД механизма;
- общий КПД механизма;
![]() - КПД зубчатой передачи (
- КПД зубчатой передачи (![]() = 0.98 для
цилиндрической прямозубой передачи);
= 0.98 для
цилиндрической прямозубой передачи);
![]() - КПД опор (
- КПД опор (![]() = 0.98);
= 0.98);
![]() - КПД разброс масла (
- КПД разброс масла (![]() =0.99);
=0.99);
n – количество зубчатых передач (n = 3);
m – количество опор (m = 4).
![]() =(0.98)4
=(0.98)4![]() (0.95)5
(0.95)5![]() 0.99 = 0.7%
0.99 = 0.7%
Nдв =  =21.12 Вт
=21.12 Вт
4 Расчёт размеров зубчатых колёс
4.1 Расчёт крутящих моментов
Крутящие моменты определяем с использованием следующего соотношения между моментами на ведомом Мведом и ведущем Мведущ зубчатых колёсах:
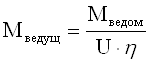 , Н·см (9)
, Н·см (9)
где U - передаточное отношение передачи, η - КПД передачи (для прямозубых колёс η = 0.97).
Начинать надо с выхода, используя момент на выходном валу Мвых
Мкр6 = Мкр вых =120 Н·см
Мкр5 = Мкр4
=  Н·см
Н·см
Мкр3 = Мкр2
=  Н·см
Н·см
Мкр1 = Мвх
=  Н·см
Н·см
4.2 Выбор материала
Материал колёс – Латунь ЛС 59, модуль Юнга и допускаемые напряжения которой ([τ]к – кручение, [σ]и – изгиб):
Е = 0.83.107, Н/см2;
[σ]и = 8500, Н/см2;
[τ]к = 10000, Н/см2.
Материал шестерней – сталь Ст45 /улучшенная/, модуль Юнга и допускаемые напряжения которой ([τ]к – кручение, [σ]и – изгиб):
Е = 2.15.107, Н/см2;
[σ]и = 19000, Н/см2;
[τ]к = 21700, Н/см2.
4.3 Расчёт модулей
Модуль зубчатых колёс вычисляется, исходя из условий контактной прочности (предотвращения выкрашивания) и условия прочности на изгиб для материалов колеса и шестерни. Из двух значений модуля, определенных из условия прочности, выбирается большее значение и округляется до ближайшего большего стандартного значения.
4.3.1 Расчёт модуля на выкрашивание
Формула для расчёта модуля цилиндрической прямозубой передачи из условия прочности на выкрашивание следующие:
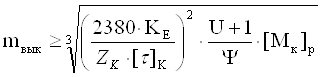 (10)
(10)
где mвык – модуль на выкрашивание;
U - передаточное число;
[Мк]р = Мк·Ккнц·Кд·Кр – расчетный момент колеса, вычесленный с учётом влияния условий эксплуатации;
Мкр - крутящий момент на колесе;
Ккнц - коэффициент концентрации нагрузки (Ккнц = 1.4 при несимметричном расположении);
Кд - коэффициент динамической нагрузки, зависящий от погрешностей изготовления колеса и скорости вращения (Кд = 1.0÷1.1);
Кр - коэффициент режима работы, зависящий от наличия ударов, вибрации (Кр = 1.0÷1.1);
КЕ - коэффициент, учитывающий разнородность материалов колеса и шестерни, определяется по формуле:
 (11)
(11)
где Eк, Eш – модули упругости материалов колеса и шестерни (Н/см2);
ZК - параметры колеса;
Ψ - относительная толщина колеса, для цилиндрического колеса Ψ = 4…10.
Для заданных материалов и полученных чисел зубьев и крутящих моментов:

Ψ = 5
[Мк]р = 120 · 1.2 · 1 · 1 = 144 Н·см
 мм
мм
4.3.2 Расчёт модуля на изгиб
Расчет модуля из условия
прочности на изгиб выполняется для элемента которого произведение [σ]и![]() y оказываеться меньшим, при этом в формулу подставляются
значения параметров, характерные для этого элемента. Формула для расчёта модуля
из условия прочности на изгиб :
y оказываеться меньшим, при этом в формулу подставляются
значения параметров, характерные для этого элемента. Формула для расчёта модуля
из условия прочности на изгиб :
Для цилиндрической прямозубой передачи:
 (12)
(12)
где y - коэффициент формы зуба, зависящий от числа зубьев Z;
[σ]и к![]() yк < [σ]и
ш
yк < [σ]и
ш![]() yш
yш
1215.5 < 18240
Расчет модуля на изгиб выполняется для колеса при заданных материалах и полученных чисел зубьев и крутящих моментов:
yк = 0.143
 мм
мм
4.3.3 Выбор модуля
По рассчитанным модулям зубчатых колёс, подбираем ближайшее большее стандартное значение.
Ближайшее стандартное значение для прямозубых цилиндрических колёс:
m = 1 мм.
4.4 Расчёт размеров зубчатых колёс
Диаметры окружностей рассчитываются по следующим формулам:
Диаметр делительной окружности цилиндрического прямозубого колеса:
d = m . z (13)
Высота выступов цилиндрического прямозубого колеса :
ha= m . ha* (14)
ha*=1
Диаметр выступов цилиндрического прямозубого колеса:
da = d + 2ha (15)
Высота впадин цилиндрического прямозубого колеса:
hf=(ha*+C*)m (16)
C*= 0,35
Диаметр впадин цилиндрического прямозубого колеса:
df = m.z - 2.hf (17)
Ширина зуба цилиндрического прямозубого колеса:
b = m . Ψ (18)
Получаем следующие значения размеров зубчатых колёс.
ha=1 .1= 1 мм
hf=1.35.0.8= 1.08 мм
d5 =d3 = d1 = 0.8 . 17 = 13.6 мм
da5=da3=da1 = 13.6 + 0.8 = 14.4 мм
df5=df3=df1 = 13.6 – 2 . 1.08 = 11.44 мм
b5=b3= b1= 5 . 0.8 + 1= 5 мм
d2 = 0.8 . 34 = 27.2 мм
da2 = 27.2 +2 . 0.8= 28.8 мм
df2 = 27.2 – 2 . 1.08 = 25.04 мм
b2 = 4мм
d4 = 0.8 . 51 = 40.8 мм
da4 = 40.8+2 . 0.8= 42.4 мм
df4 = 40.8 – 2 . 1.08= 38.64 мм
b4 = 4 мм
d6 = 0.8 . 102 = 81.6 мм
da6 = 81.6 +2 . 0.8= 83.2 мм
df6 = 81.6 -2 . 1.08 = 79.44 мм
b6 =4 мм
5 Расчёт валов
Расчёт валов производят при наличии следующих исходных данных: размеров зубчатых колёс, усилий в зацеплениях и схемы расположения зубчатых колёс на валах в осевом направлении.
5.1 Определение усилий
Усилия в зацеплениях представляются в виде трёх составляющих: окружной P, радиальной T и осевой (аксиальной) Q. Окружное усилие P направлено по касательной к делительной окружности по направлению движения для ведомого колеса и против движения для ведущего колеса; радиальное усилие T направлено к центру колеса, осевое Q - вдоль оси.
Усилия в зубчатых передачах вычисляются по формулам:
Цилиндрическая прямозубая передача.
Окружное усилие.
 (19)
(19)
Радиальное усилие.
![]() (20)
(20)
где α - угол зацепления, для эвольвентных зубчатых колёс α = 200.
Используя формулы (22) и (23), получаем следующие значения.
Окружное и радиальное усилия, действующие на шестерню 5.
 Н
Н
![]() Н
Н
Окружное и радиальное усилия, действующие на колесо 4.
 Н
Н
![]() Н
Н
Окружное и радиальное усилия, действующие на колесо 6.
 Н
Н
![]() Н
Н
5.2 Компоновочная схема
Компоновочная схема редуктора, с усилиями в зацеплениях колёс, представлена на рис. 4.
Она представляет собой эскизный упрощённый вариант конструкции.
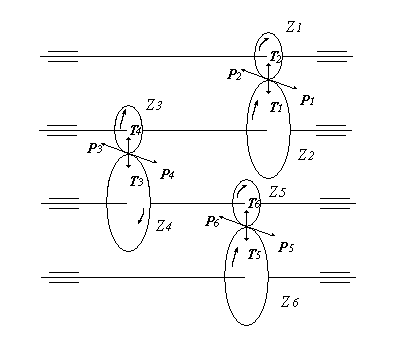
Рисунок 4 - Компоновочная схема редуктора
5.3 Расчет длины вала
Зная размеры зубчатых колес, составляется эскизная компоновка механизма (рис. 5) и определяются необходимые размеры валов. Расстояние l1 между серединами левого и правого подшипника определяется по формуле
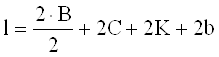
где Bn - ширина подшипника , мм.
С – зазор между стенкой корпуса и колеса, мм.
K – ширина ступицы, мм.
b – ширина зуба , мм.

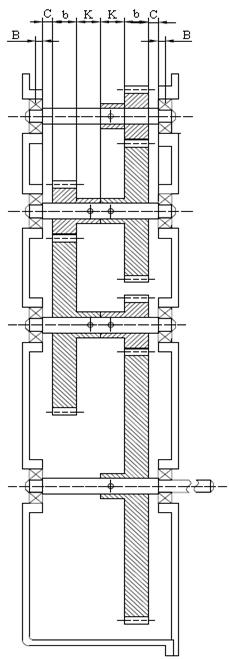
Рисунок 5 - Эскизная компоновка механизма
5.4 Расчёт диаметра предпоследнего вала
5.4.1 Расчётные схемы. Построение эпюр
Расчётная схема предпоследнего вала представлена на рис. 6.
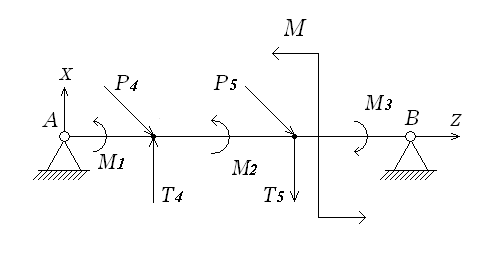
Рисунок 6 - Усилия в зацеплениях колёс предпоследнего вала
Рассмотрим плоский изгиб в плоскости YOZ (рис. 7).
Где ![]() - длина вала, a1= 7 мм , a2= 7.5 мм , a3=22.5 мм ,
- длина вала, a1= 7 мм , a2= 7.5 мм , a3=22.5 мм ,
![]()
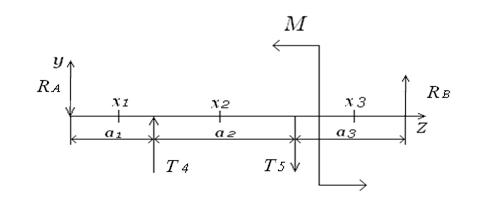
Рисунок 7 - Усилия, действующие в плоскости YOZ
Для этого определим реакции в опорах из условий равновесия:
![]()
RB = 0.9 Н
![]()
RА = -0.08 Н
Проверка:
![]()
![]()
-0,08 + 0.9 – 1.11 + 0.37 = 0
Изгибающие моменты на участках zi даны в таблице 1.
Таблица 1 - Изгибающие моменты в плоскости YOZ.
|
0 ≤ x1 ≤ a1 |
a1 ≤ x2 ≤ a1+a2 |
0 ≤ x3 ≤ a3 |
|
M1 = RA . x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = -0.08 . 7 = -0.56 Н.мм |
M2 = RA . x2 + T4 . (x2 - a1) x2 = a1 , M2 = -0.56 Н.мм x2 = a1+a2 , M2 = -2.36+8.325 = 5.96 Н.мм |
M3 = RB . x3 x3 = 0 , M3 = 0 x3 = a3 , M3 = 0.9 . 7.5 = 6 Н.мм |
Эпюра МХ представлена на рис.
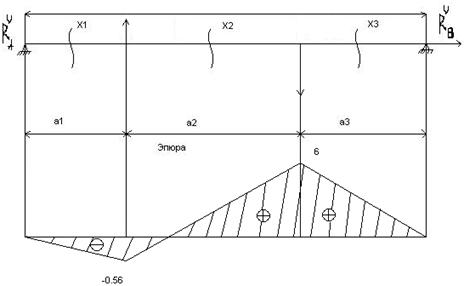
Рисунок 8 - Эпюра МХ
Рассмотрим плоский изгиб в плоскости XOZ (рис. 9).
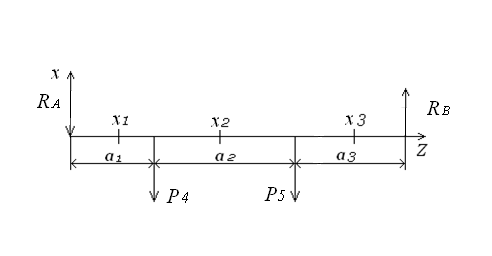
Рисунок 9 - Усилия, действующие в плоскости XOZ
Определим реакции в опорах из условий равновесия:
![]()
RB = 1.07 Н
![]()
RА = 0.59 Н
Проверка
![]()
![]()
0.59+1.07-0.37-1.11 = 0
Изгибающие моменты на участках zi даны в таблице 2.
Таблица 2 - Изгибающие моменты в плоскости XOZ.
|
0 ≤ x1 ≤ a1 |
a1 ≤ x2 ≤ a1+a2 |
0 ≤ x3 ≤ a3 |
|
M1 = RA . x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = 0.59 . 7= 4.13 Н.мм |
M2 = RA . x2 - P4 . (x2 - a1) x2 = a1 , M2 = 4.13 Н.мм x2 = a1+a2 , M2 = 0.59 . 29.5-0.37 . 22.5 = 9 Н.мм |
M3 = RB . x3 x3 = 0 , M3 = 0 x3 = a3 , M3 = 1.07 . 7.5 = 9 Н.мм |
Эпюра МY представлена на рис. 10.

Рисунок 10 - Эпюра МY
5.4.2 Расчёт диаметра вала
Диаметр вала определяется из рассмотрения условий прочности.
Наибольшие изгибающие моменты Мхмах = 6 Н.мм , Мумах = 9 Н.мм.
Условие прочности для вала представляется в виде:
 (22)
(22)
где Мпр - приведённый момент, определяемый по формуле:
![]() (23)
(23)
МХ, МY, - изгибающие моменты в опасном сечении в двух перпендикулярных плоскостях;
[σ-1]и - предел выносливости при симметричном цикле (для Ст45 [σ-1]и = 8000 Н/см2).
Таким образом:
![]() Н. см
Н. см
 мм
мм
Округляем полученное значение до ближайшего большего значения по ГОСТ 6366-90.
d = 1.6 мм.
5.5 Расчёт диаметра выходного вала
5.5.1 Расчётные схемы. Построение эпюр
Расчётная схема выходного вала представлена на рис. 11.
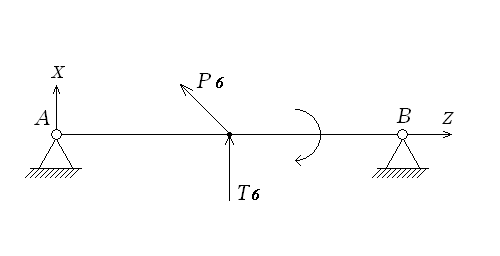
Рисунок 11 - Усилия в зацеплении колеса выходного вала
Рассмотрим плоский изгиб в плоскости YOZ (рис. 12).
Где ![]() - длина вала,
- длина вала, ![]() ,
, ![]() .
.
![]()
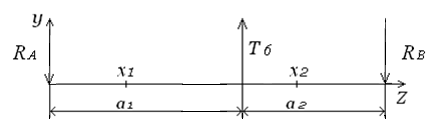
Рисунок 12 - Усилие, действующее в плоскости YOZ
Определим реакции в опорах из условий равновесия:
![]()
![]() Н
Н
![]()
![]() Н
Н
Проверка
![]()
![]()
-0.8+1.05-0.24=0
Изгибающие моменты на участках zi даны в таблице 3.
Таблица 3 - Изгибающие моменты в плоскости YOZ
|
0 ≤ X1 ≤ a1 |
0 ≤ X2 ≤ a2 |
|
M1 = RA . x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = 25.5 . (-0.24) = -6 Н.мм |
M2 = RB . x2 x2 = 0 , M3 = 0 x2 = a2 , M2 = 7.5 . (0.8)= -6 Н.мм |
Эпюра МХ показана на рис. 13.
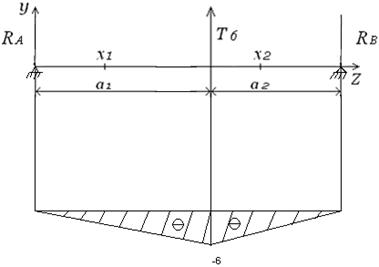
Рисунок 13 - Эпюра МХ
Рассмотрим плоский изгиб в плоскости XOZ (рис. 14)
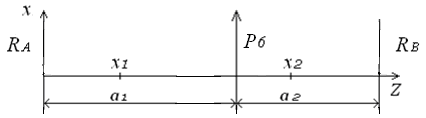
Рисунок 14 Усилие, действующее в плоскости XOZ.
Определим реакции в опорах из условий равновесия:
![]()
![]() Н
Н
![]()
![]() Н
Н
Проверка
![]()
![]()
-1.05+0.72+0.3=0
Изгибающие моменты на участках zi даны в таблице 4.
Таблица 4 - Изгибающие моменты в плоскости XOZ
|
0 ≤ X1 ≤ a1 |
0 ≤ X2 ≤ a2 |
|
M1 = RA . x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = 0.3 . 5.5 = 6 Н.мм |
M2 = RB . x2 x2 = 0 , M3 = 0 x2 = a2 , M2 = 7.5 . 0.72 = 6 Н.мм |
Эпюра МY показана на рис. 15.
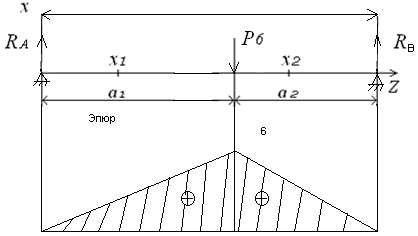
Рисунок 15 - Эпюра МY
5.5.2 Расчёт диаметра выходного вала
Наибольшие изгибающие моменты Мхмах = 6 Н.мм , Мумах = 0 Н.мм.
Таким образом, используя формулы (22) и (23), получаем
![]() Н. см
Н. см
 мм
мм
Округляем полученное значение до ближайшего большего значения по ГОСТ 6366-90.
d = 3 мм.
6 Расчёт и выбор подшипника
6.1 Выбор подшипника
Выбор типа подшипника зависит от отношения осевой силы FA радиальной Fr. В разрабатываемом редукторе присутствуют только прямозубые зубчатые колеса следовательно выбираются радиальные шарикоподшипники , так как

На основе полученного значения диаметра выходного вала (d = 3 мм), выбираем подшипник радиальный 1 000 092, параметры которого приведены в таблице 5 и таблице 6.
Таблица 5 - Параметры шарикоподшипника радиального однорядного 1 000 094 ГОСТ 8338-57
| Размеры, мм | Шарики | |||
| d | D | B | Dw, мм | Z |
| 3 | 8 | 3 | 1.59 | 6 |
Таблица 6 - Ориентировочные расчётные параметры
| Грузоподьёмность, Н | |
| Динамическая (С) |
Статическая (С0) |
| 440 | 200 |
Размеры подшипника обозначены на рис. 16.
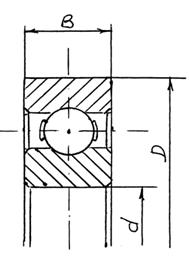
Рисунок 16 - Размеры подшипника 1 000 092
6.2 Расчёт подшипника на долговечность
Теоретическая расчётная долговечность L в млн. оборотов определяется по формуле
 (24)
(24)
где С - динамическая грузоподъёмность подшипника;
Р - эквивалентная динамическая нагрузка определяется по эмпирическим формулам и зависит от действующих на подшипник сил, характера нагрузки и температуры.
Долговечность подшипника в часах
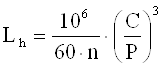 (25)
(25)
где n - частота вращения кольца подшипника в минуту (nвых'). Для приборных зубчатых редукторов ресурс работы подшипников устанавливаеться в пределах 1000-10000 ч.
Эквивалентная динамическая нагрузка Р для однорядных радиальных и радиально-упорных шарикоподшипников
![]() (26)
(26)
где Кδ - коэффициент, учитывающий влияние динамических условий работы (Кδ = 1);
КТ - коэффициент, учитывающий влияние температурного режима работы на долговечность подшипника (КТ = 1);
ν - коэффициент, учитывающий какое кольцо вращается; при вращении внутреннего кольца ν = 1; наружного кольца ν = 1.2 (кроме радиального шарикового сферического, радиально-упорного шарикового магнитного, для которых в любом случае ν = 1);
X и Y - коэффициенты радиальной и осевой нагрузок соответственно, назначаемые в зависимости от параметра осевой нагрузки (при отсутствии осевой нагрузки - X = 1, Y = 0).
Fr - радиальная нагрузка;
Fa - осевая нагрузка
Радиальная нагрузка определяется, как наибольшая величина, полученная из следующих уравнений
![]() (27)
(27)
![]() (28)
(28)
Где RA, RB, RA, RB - реакции опор в обоих подшипниках одного вала, разложенные по осям. Эквивалентная статическая нагрузка P0 для радиальных, радиально-упорных шарикоподшипников выбирается как наибольшая величина, полученная из уравнений.
Используя формулы (27) и (28), получим следующие значения радиальных нагрузок на подшипниках выходного вала
![]() Н
Н
![]() Н
Н
Поскольку ![]() , то
, то
Fr = Fr1 = 21.34 Н
Определим эквивалентную динамическую нагрузку по формуле (26)
![]() Н
Н
Пользуясь данными из таблицы 6 и формулами (24) и (25), получим номинальную долговечность
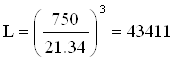 млн.об.
млн.об.
или
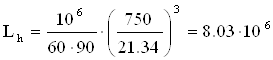 ч.
ч.
7 Расчет элеметнов крепления
Крепление колес на валах осуществляется при помощи штифтов.
7.1 Расчет диаметра штифта
Диаметр штифта dш выбирается из ряда стандартных размеров при учете соотношения (10) и проверяются условия прочности на срез и на смятие

Диаметр штифта dш=1.6 мм, длина штифта l= 8мм ГОСТ 3128-70.
7.1.2 Расчёт на срез
 (29)
(29)
где М - крутящий момент на валу;
dв - диаметр вала;
z - число площадок среза;
[τ]ср –допускаемое напряжение среза ([τ]ср =150 Н/мм2).
Подставляя в формулу (29), получаем

Условия прочности на срез выполняется
7.1.3 Расчёт на смятие
 (30)
(30)
где h - толщина прикрепляемой детали;
[σ]см - допускаемое напряжение смятия ([σ]см = 173 Н/мм2).
Из формул (30) , получаем

Условия прочности на смятие выполняется.
8. Расчёт точности
В качестве показателя точности передачи принимается кинематическая погрешность и мертвый ход.
Алгоритм расчета точности разрабатывается исходя из задач исследования. В данной работе применяться алгоритм оценки наименьшей и возможной , погрешности передачи при заданных степенях точности, включающий в себя :
1. Расчет параметров передачи, необходимых для выбора показателей точности зубчатых колес и передач из таблиц стандартов.
- передаточного числа по формуле (5);
- делительных диаметров по формуле (13);
- межосевого расстояния
 , мм
, мм
где dш и dк –диаметр шестерни и колеса соответственно, мм.
2. Выбора необходимых показателей точности из таблиц стандартов по исходным данным параметрам, вычислениям.
3. Расчет минимальной кинематической погрешности по формуле
![]() , мкм (32)
, мкм (32)
 ,угл. мин. (33)
,угл. мин. (33)
где ![]() - коэффициент
фазовой компенсации;
- коэффициент
фазовой компенсации;
![]() - минимальная
кинематическая погрешность.
- минимальная
кинематическая погрешность.
![]() ,мкм (34)
,мкм (34)
![]() ,мкм.
(35)
,мкм.
(35)
где ![]() ,
,![]() - значение допуска для
цилиндрических зубчатых колес ,мкм;
- значение допуска для
цилиндрических зубчатых колес ,мкм;
![]() - значение
допуска на кинематическую погрешность для зубчатой передачи, мкм.
- значение
допуска на кинематическую погрешность для зубчатой передачи, мкм.
4. Расчет минимального мертвого хода по формуле
 , мкм. (36)
, мкм. (36)
 ,угл. мин. (37)
,угл. мин. (37)
где ![]() - угол
зацепления (
- угол
зацепления (![]() =20
для эвольвентного зацепления);
=20
для эвольвентного зацепления);
f min – параметр для цилиндрической передачи, мкм.
5. Расчет суммарной минимальной погрешности передачи по формуле
![]() , угл. мин. (38)
, угл. мин. (38)
Определение параметров передачи и выбор стандартов показателей точности сведены в таблицу 7.
Таблица 7 – Определение параметров передачи
| Зубчатая передача | U | d ,мм |
aw, мм |
Fp , мкм |
fn min ,мкм |
ff , мкм |
Ks | ||
|
dш |
dk |
Fpш |
Fpк |
||||||
|
Z1 Z2 |
2.52 | 17 | 43 | 30 | 34 | 30 | 74 | 11 | 0,75 |
|
Z3 Z4 |
3.23 | 17 | 55 | 36 | 34 | 35 | 74 | 11 | 0,75 |
|
Z4 Z5 |
5 | 17 | 85 | 51 | 34 | 42 | 87 | 11 | 0,75 |
Результаты расчетов допусков на кинематическую погрешность и определение минимального мертвого хода сведены в таблицу 8.
Таблица 8 – Результаты расчетов определения погрешностей зубчатых передач
| Зубчатая передача | Fi’ , мкм |
Fiio’ ,мкм |
Δφ*min ,мкм |
Δφmin ,угл.мин. |
ΔС*min ,мкм |
ΔCmin ,угл.мин. |
ΔСΣmin ,угл.мин. |
|
|
Fiш’ |
Fiк’ |
|||||||
|
Z1 Z2 |
45 | 41 | 86 | 39.99 | 6.39 | 78.8 | 13.41 | 19.81 |
|
Z3 Z4 |
45 | 46 | 91 | 42.31 | 5.29 | 78.8 | 10.48 | 15.78 |
|
Z4 Z5 |
45 | 53 | 98 | 45.57 | 3.68 | 92.65 | 7.98 | 11.66 |
Значения полученные в результате вычислений суммарной погрешности зубчатых передач находятся в пределах заданных допустимых значений 30 угл.мин.
9. Определение оценки уровня унификации
Одним из критериев качества изделия является коэффициент унификации или интегральный коэффициент. Эти коэффициенты дают возможность оценить уровень унификации и стандартизации изделия, т. е. оценить целесообразность конструкции исходя из её экономичности.
Коэффициент унификации определяется по формуле
 (39)
(39)
Интегральный коэффициент определяется по формуле
 (40)
(40)
где N - общее количество составных частей изделия в штуках;
N0 - количество оригинальных составных частей изделия в штуках;
n - общее количество типоразмеров составных частей изделия;
n0 - количество типоразмеров оригинальных составных частей изделия.
Оценке уровня унификации и стандартизации разрабатываемого изделия предшествует составление перечня его составных частей. Перечень представлен в таблице 9.
Используя формулы (39) и (40), получим
Таблица 9 – Элементы конструкции и типоразмеры
| Позиции на сборочном чертеже | Наименование детали | Типоразмер детали , мм | Количество деталей | Индекс детали |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
Стакан Корпус Крышка корпуса Вал входной Прокладка Крышка подшипника Зубчатое колесо Шестерня Зубчатое колесо Сальник Вал выходной Зубчатое колесо Вал Муфта Двигатель СЛ 261 Подшипник Винт Гайка Шайба Штифт Штифт Установочный винт Винт |
Ø74 X 100 235 Х 117 Х 182 235 Х 1.5 Ø5 Х 55 0.5 Ø21 Х 3.5 Ø45 Х 7 Ø19 Х 7 Ø85 Х 7 Ø6 Х 1 Ø5 Х 55 Ø57 Х 7 Ø5 Х 44 Ø12 Х 15 Ø70 X 115 4 Х 11 Х 4 М2 Х 6 М2 М2 Ø1.6 Х 8 Ø1.6 Х 12 М2 Х 3 М2 Х 8 |
1 1 1 1 8 8 1 3 1 2 1 1 2 1 1 8 52 14 14 6 1 1 1 |
О О О О О О О О О О О О О О С С С С С С С С С |
Заключение
По полученному заданию был спроектирован исполнительный механизм в корпусе с двигателем и одним выходным валом.
В ходе проектирования были выполнены кинематический расчет с выбором электродвигателя, расчет зубчатых передач. После выполнения компоновочных чертежей были выполнены проверочные расчеты подшипников качения, вала, штифтов.
Список Использованных источников
1. Л. С. Лукичёва, В. П. Миронович, Е. Е. Чаадаева, К. Н. Явленский. Проектирование механизмов приборов. Методические указания к курсовому проектированию. - СПб, ГУАП, 1998г.
2. Л. С. Лукичёва, Г. Н. Никифорова, Е. Е. Чаадаева, К. Н. Явленский. Автоматизация проектирования механизмов и устройств авиационных приборов. Учебное пособие. - СПб, ГУАП, 1993г.
3. И. М. Сивоконенко, К. Н. Явленский. Расчёт и проектирование механизмов приборов. Учебное пособие. Л, ЛИАП, 1981г.
4. С.А. Михальков, Л.С. Трофимовская, К.Н. Явленский. Механизмы приборов и устройств летательных аппаратов. Атлас конструкций. Учебное пособие ,- Ленинград, ЛИАП, 1981 г.
5. О.В. Опалихина, Ю.Н. Соколов. Механика. Методические указания по оформлению курсового проекта. – СПб, ГУАП, 2008г.
Изложение текста и оформление работ следует выполнять в соответствии с требованиями ГОСТ 7.32 – 2001, ГОСТ 2.105 – 95 и ГОСТ Р 6.30 – 97
1 Текст работ следует печатать, соблюдая следующие требования:
· текст набирается шрифтом Times New Roman размером (кеглем) 14, строчным, без выделения, с выравниванием по ширине;
· абзацный отступ должен быть одинаковым и равен по всему тексту 1,27 см;
· строки разделяются полуторным интервалом;
· поля страницы: верхнее и нижнее – 20 мм, левое не меньше 20 мм, правое 10 мм;
· введение и заключение не нумеруются.
2 Основную часть работы следует делить на разделы и подразделы:
· все названия имеют выравнивание по центру без точки в конце;
· заголовок раздела печатается кеглем 14, прописным, полужирным;
· заголовок подраздела – кеглем 14, строчным, полужирным;
· заголовки от текста отделяют сверху тремя интервалами, снизу – двумя интервалами;
· заголовки разделов и подразделов следует печатать с абзацного отступа с прописной буквы без точки в конце, не подчеркивая;
· если заголовок состоит из двух предложений, их разделяют точкой;
· переносы слов в заголовках не допускаются;
· разделы и подразделы должны иметь порядковую нумерацию в пределах всего текста;
· нумеровать их следует арабскими цифрами;
· после номера раздела и подраздела в тексте точку не ставят.
3 Страницы работ следует нумеровать арабскими цифрами, соблюдая сквозную нумерацию по всему тексту работ.
Титульный лист включают в общую нумерацию страниц работ.
Номер страницы на титульном листе не проставляют.
Номер страницы проставляют в центре нижней части листа без точки.