
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Дипломная работа: Схема автоматического регулирования продолжительности выпечки с коррекцией по температуре во второй зоне пекарной камеры
Дипломная работа: Схема автоматического регулирования продолжительности выпечки с коррекцией по температуре во второй зоне пекарной камеры
СОДЕРЖАНИЕ
1. Технологическая часть
1.1 Анализ работы технологического процесса и описание производственной установки
1.2 Анализ работы оператора
1.3 Определение передаточного числа редуктора и расчет участков длин лент конвейера
1.4 Расчетная схема механической части электропривода
2. Выбор системы электропривода и автоматизации
2.1 Расчет нагрузок механизма установки и построение нагрузочной диаграммы
2.1.1 Расчет нагрузок механизма и предварительный выбор редуктора
2.1.2 Расчет нагрузок механизма на холостом ходу
2.1.3 Построение нагрузочной диаграммы механизма
2.2 Предварительный расчет мощности двигателя
2.3 Требования к автоматизированному электроприводу
2.4 Патентно-информационный поиск по объекту проектирования
2.5 Предварительный выбор двигателя, способа управления и комплектного преобразователя
2.5.1 Выбор способа управления и двигателя
2.5.2 Выбор комплектного преобразователя
3. Технико-экономическое обоснование рациональной системы электропривода
4. Расчет электромеханических процессов в электроприводе
4.1 Построение нагрузочной диаграммы с учетом регулирования координат электропривода
4.2 Проверка выбранного электропривода по перегрузочной способности и нагреву
5. Расчет и проектирование силовой схемы автоматизированного электропривода
5.1 Выбор сглаживающего дросселя
5.2 Выбор силовых диодов
5.3 Выбор конденсаторов силового фильтра
5.4 Выбор силовых транзисторов
5.5 Выбор конденсаторов входного фильтра
5.6 Выбор тормозного резистора
6. Проектирование системы автоматического управления
6.1 Математическое описание объекта управления
6.1.1Математическое описание асинхронного электродвигателя из уравнений обобщенной машины
6.1.2 Математическое описание асинхронного электродвигателя в установившихся режимах
6.1.3 Составление структурной схемы частотно-регулируемого асинхронного двигателя
6.2 Расчет основных параметров для функциональной схемы САУ
6.2.1 Определение потерь мощности в электродвигателе
6.2.2 Расчет параметров схемы замещения
6.3 Синтез регулятора момента
6.4 Построение статических характеристик электропривода
6.5 Проверка электродвигателя по нагреву при работе на нижней скорости.
7. Анализ динамических характеристик технологической установки
7.1 Моделирование динамики технологической установки
7.2 Определение показателей переходных процессов
8. Выбор и проектирование систем автоматизации производственной установки
8.1 Формализация условий работы установки
8.2 Разработка алгоритма управления
8.3 Разработка алгоритма управления
8.4 Выбор аппаратов.
8.4.1 Выбор программируемого контроллера и составление программы
8.4.2Выбор аппаратов
9. Конструктивноя разработка пульта управления
10. Проектирование схемы электроснабжения и защиты установки
10.1 Выбор аппаратов и кабелей
10.2 Проектирование защит
11. Наладка и диагностика электропривода и системы автоматизации установки
11.1 Наладка и диагностика электропривода
11.2 Наладка системы автоматизации
12. Охрана труда
12.1 Правила эксплуатации хлебопекарной печи
12.2 Техника безопасности и охрана труда
12.3 Расчет зануления
13. Технико-экономические показатели
13.1 Общие сведения
13.2 Расчет начальных затрат
13.3 Определение эксплуатационных затрат
13.4 Анализ полученных технико-экономических показателей
ВВЕДЕНИЕ
Употребление человеком в пищу зерна хлебовых злаков и продуктов его переработки имеет свою историю, исчисляемую тысячелетиями.
В дореволюционной Беларуси промышленное производство осуществлялось в основном в мелких кустарных механизированных пекарнях. В первые годы после революции была произведена национализация хлебопекарных предприятий и производство хлеба было сосредоточено в более крупных и относительно лучших пекарнях. Современное хлебопекарное производство в Беларуси сосредоточено в основном на крупных хлебозаводах. На этих предприятиях произведена полная механизация и автоматизации всех основных производственных операций, из которых слагается процесс приготовления хлеба.
Самой сложной и ответственной операцией приготовления хлеба является выпечка. Выпечка – это процесс прогрева расстоявшихся тестовых заготовок, приводящий к их превращению из состояния теста в состояние хлеба. Для выпечки хлеба и хлебных изделий обычно применяются печи, в которых тепло выпекаемому тесту-хлебу передается термоизлучением и конвенцией при температуре теплоотдающих поверхностей 300 – 400 ˚С и среды пекарной камеры 200 – 250 ˚С. Самым оптимальным вариантом автоматизации процесса выпечки является автоматическое регулирование влажности в зоне пароувлажнения печи, температур корки и мякиша выпекаемой продукции. Однако создание такой системы регулирования затруднительно из-за несовершенства приборов измерения влажности и температуры мякиша. Поэтому применяют косвенные схемы регулирования.
В данном дипломном проекте необходимо разработать одну из таких схем. Необходимо спроектировать схему автоматического регулирования продолжительности выпечки с коррекцией по температуре во второй зоне пекарной камеры, где происходит выпечка мякиша. Применение такой схемы автоматизации должно привести к улучшению качества выпеаемой продукции и уменьшению брака.
1.ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ
1.1 Анализ технологического процесса и описание производственной установки
Тепловая, точнее гигротермическая обработка теста является процессом, завершающим превращение его в готовый продукт (хлеб, хлебобулочные изделия, печение, баранки или полуфабрикат кондитерских изделий, подвергающийся отделочным операциям, после которых он становится готовым продуктом (пироженым, тортом, пряником и т.д.)) [1].
В пекарной камере хлебобулочной, кондитерской или бараночной печи должен быть создан такой режим процесса выпечки, который обеспечил бы получение продукта высокого качества.
Исследованиями советских ученых Н. И. Краснонцева, А. С. Гинзбурга, А.А. Михелева установлены основные теплофизические закономерности, происходящие при выпечке. В основу расчета и проектирования новых конструкций и модернизации действующих печей для выпечки хлеба, печенья, баранок и другого ассортимента должны быть приняты установленные исследованиями закономерности переноса тепла и влаги в процессе выпечки.
Выпечка является сложным комплексным процессом, состоящим из теплофизического, коллоидного, микробиологического и биохимического процессов, в результате которых тесто превращается в готовый продукт: хлеб, баранки, печенье и т. д. Основным фактором, обуславливающим процесс выпечки, является подогрев теста-хлеба.
При повышении температуры теста в нем происходят химические реакции со значительным выделением углекислого газа, являющимся рыхлителем теста. В результате объем тестовой заготовки увеличивается. Изменение ее объема происходит до тех пор, пока тесто не прогреется до такой температуры, при которой происходит денатурация белков, а на поверхности образуется плотный слой корки, после чего изменение объема теста-хлеба практически не происходит.
В течении первых минут выпечки подовых сортов хлеба, хлебобулочных изделий и другого ассортимента происходит интенсивное увлажнение среды пекарной камеры (в некоторых случаях в момент посадки увлажняется поверхность тестовых заготовок водой, распыляемой при помощи специальных водяных форсунок).
При насыщении насыщенным порам он конденсируется на холодной поверхности теста; в результате этого на поверхности тестовой заготовки образуется тонкая эластичная пленка растворенного теста; благодаря этому задерживается образование корки и создаются условия для увеличения объема тестовой заготовки без разрывов ее поверхности. Поверхность подового хлеба получается гладкая, глянцевитая, с красивым цветом. При выпечке печения с увлажнением его уменьшается продолжительность прогрева и улучшается качество печения.
При выпечке баранок тестовые заготовки сначала обвариваются в кипящей воде или ошпариваются паром; при этом центральный слой теста прогревают примерно до 50-60˚С, а поверхностный слой – до 60-70˚С. В результате этого в бараночном тесте начинаются процессы клейстеризации крахмала и денатурации белков. Образовавшийся достаточно прочный «белковый скелет» при дальнейшем процессе практически обеспечивает постоянный объем бараночных изделий. В процессе обварки или обшпарки на поверхности тестовых заготовок образуется пленка растворенного теста, которая при дальнейшем прогреве спосрбствует образованию глянцевистой поверхности.
Печь хлебопекарная с электрообогревом марки А2-ХПЯ-25(в дальнейшем печь) предназначена для выпечки широкого ассортимента хлеба и булочных изделий. Печь в составе механизированной линии хлеба или булочных изделий устанавливается на хлебопекарных предприятиях [2].
Технические данные печи приведены в таблице 1.1:
Табллица 1.1
| Техническая производительность подового хлеба массой 0.8 кг из смеси ржаной и пшеничной муки II сорта, кг/ч | 520 |
| Техническая производительность печи при выпечке батонов нарезных массой 0.4 кг из пшеничной муки I сорта, кг/ч | 642 |
|
Рабочая площадь пода, м2 Техническая производительность печи при выпечке хлеба |
25 |
| Ширина пода, м | 2.1 |
| Пределы регулирования продолжительности выпечки, мин | 17…72 |
| Длина печи, мм | 15300 |
| Ширина печи, мм | 3052 |
| Высота печи, мм | 1420 |
Некоторые сведения о параметрах технологического процесса при выпечке некоторых видов хлебопекарных изделий приведены в таблице 1.2:
Таблица 1.2
| Наименование продукции | Масса, кг | Сорт | Температура в зонах пекарной камеры,°С | Продолжитель-ность выпечки, мин | ||
| I | II | III | ||||
| Батон «Домашний» | 0.4 | I или высший | 190-230 | 240-270 | 220-260 | 22-24 |
| Хлеб «Злаковый» | 0.8 | I | 270-290 | 260-280 | 210-250 | 40-42 |
| Батон «Славянский» | 0.2 | I или высший | 180-220 | 240-270 | 210-250 | 18-22 |
Печь поставляется на место монтажа в виде отдельных сборных единиц. Печь (рис 1.1) относится к печам туннельного типа с подвижным сетчатым подом (1), который приводится в действие электродвигателем, установленным на приводе (2). Сетчатый под натянут барабанами приводной (3) и натяжной (16) станциями. Пекарная камера печи секционная, собирается из секций, установленных в корпусах (4, 5, 6). Корпуса закрываются ограждениями (7, 8, 9, 10, 11, 12), имеющие двери для доступа к электронагревателям, установленным в пекарной камере.
На входе в печь над натяжной станцией установлен зонт (13), служащий для отвода паро-воздушной среды, выходящей из посадочного устья. Такой же зонт (14) установлен и на выходе печи и служит для отвода паров упека. Зонты соединены системой газоходов (33) с вытяжным вентилятором. Над зонтом (14) устанавливается опрыскиватель готовой продукции (17). Высоту посадочного и выгрузного устьев можно регулировать с помощью шиберов, ручки управления которых (18) и (19) выведены на зонты (13) и (14). Паропровод через патрубок (30) подсоединяется к конденсаторному баку (24).
Силовой распределительный шкаф (15) устанавливается у печи в районе ограждения последнего корпуса (6). Силовая часть электрооборудования размещается на печи (электрообогреватели, электродвигатели приводов: сетчатого ленточного конвейера, механизма очистки сетки, устройства опрыскивания готовой продукции, вентилятора). В последней секции печи устанавливается щит управления (20), получающий питание от силового распределительного шкафа (15) по кабелю (21). В корпусах, за дверями охлаждения, расположены рукоятки управления (23) с заслонками пекарной камеры, а так же ручки шиберов (22) регулирования количества отсоса паро-воздушной среды из-под зонтов. Принудительное удаление паро-воздушной среды из пекарной камеры в атмосферы может осуществляться вентилятором (26) или, при отключении вентилятора, за счет естественной тяги.
Раструб (29) крепится одной стороной к каркасу, а другой к отсасывающему газоходу пекарной камеры. На поверхность корпуса выведены: рукоятка (27) шибера (31), регулирующего отсос из-под зонтов. Для наблюдения за процессом выпечки в корпусе предусмотрено окно (36).
Печь работает следующим образом: после расстойного шкафа тестовые заготовки поступают на сетчатый под (1), который транспортирует их в пекарную камеру печи. Пекарная камера разбита на 4 температурные зоны. Нулевая зона находится на участке гидротермической обработки и включает в себя 12 нагревателей (35). Первая зона включает в себя 26, вторая – 38, третья –
12 нагревателей. Электронагреватели расположены в пекарной камере печи сверху и снизу сетчатого пода с двух сторон по ширине и с определенными шагами по длине пекарной камеры (графическая часть: лист 1). В передней части пекарной камеры находится зона пароувлажнения (41), где тестовые заготовки последовательно походят все тепловые зоны пекарной камеры, где выпекаются за время, соответствующее технологическим требованиям на изделия. Кинематическая схема механизмов печи приведена на рис. 1.2. Кинематическая схема механической части электропривода сетчатого пода состоит из электродвигателя (1) АИР80В4 Р=1.5 кВт, n=1430 об/мин, клиноременной передачи D90-D180 (2) от электродвигателя к блок-вариатору 11РАХ-02х190х6х50 TGL1293 (7), цепной передачи z=18 (8), z=85 (9), звездочка (8) выполнена в блоке с храповым механизмом, отключающим блок-вариатор при применении ручного привода, храповый механизм позволяет также превращать касательное движение рукоятки ручного привода во вращательное движение приводного вала.
Кинематическая схема механизма щетки для очистки сетчатого пода состоит из электродвигателя 4A100L6 Р=2.2 кВт, n=1000 об/мин (16), клиноременной передачи со шкивами (17, 18), цепной передачи со звездочками z=17 (19) и z=48 (20), вторая звездочка (20) насажена на вал щетки. Кинематическая схема механизмов опрыскивания состоит из мотор-редуктора МЦ2С 63-71-КУЗ (21) и цепной передачи z1=z2=8 (22 и 23). Кинематическая схема механической части электропривода вентилятора состоит из электродвигателя (20) 4A90l4 P=2.2 кВт, n=1500 об/мин, приводного вала (24) и рабочего колеса вентилятора ВЦ4-75 №5 (22).
1.2 Анализ работы оператора
Для обеспечения обслуживания оператором предусматривается: дистанционное управление электродвигателями: конвейера пода печи, вентилятора, механизма очистки сетки, механизма опрыскивания, и сигнализации об их включении; а также автоматическое регулирование и контроль температуры в пекарной камере по зонам печи.
При обслуживании хлебопекарной печи оператор выполняет следующие операции:
1. Включает вводные и автоматические выключатели в распределительном шкафу, подавая напряжение в щит управления и механизмы печи.
2. Включает механизмы печи: электронагреватели, электродвигатели механизмов установки.
3. ТЭНы включаются отдельно в зависимости от вида выпекаемой продукции.
4. Оператору необходимо с помощью маховика блок-вариатора необходимое время выпечки, заданное по технологической карте на изделия.
5. Оператору необходимо с помощью ручки регуляторов температуры установить необходимые значения температуры по зонам пекарной камеры.
6. Оператору необходимо следить за качеством выпекаемой продукции и в случае необходимости корректировать время выпечки.
7. Оператору необходимо следить за технологическим процессом и в случае аварии необходимо отключить все механизмы печи и электронагреватели.
1.3 Определение передаточного числа редуктора и расчет участков длин ленты конвейера
Кинематическая схема механической части электропривода сетчатого пода представлена на рис. 1.3.
Целью данного дипломного проекта является модернизация привода ленточного конвейера. Продолжительность выпечки необходимо регулировать электрически, т.е. регулировать скорость вращения приводного двигателя. В связи с этим на кинематической схеме (рис. 1.3) блок-вариатор заменен редуктором. По кинематической схеме определим передаточные числа элементов кинематической цепи.
Передаточное число клиноременной передачи:
![]() .
.
Передаточное число цепной передачи (5), (6):
![]() .
.
Передаточное число цепной передачи (7), (8):
![]() .
.
Передаточное число цепной передачи (10), (11):
![]() .
.
Рассчитаем участки длин ленты конвейера. Имеем исходные данные для расчета (табл. 1.3):
Таблица 1.3
|
Sp |
Рабочая площадь пода, м2 |
25 |
|
bp |
Рабочая ширина пода, м | 2.1 |
| t | Пределы регулирования времени выпечки, мин | 12…72 |
| β | Угол загрузки,° | 10 |
|
Rб |
Радиус приводного барабана, м | 0.125 |
|
l31 |
Длина печи, м | 15.3 |
Рабочая длина пода:
 .
.
Длина участка l12:
![]() м.
м.
Длина участка l23:
![]() м.
м.
Рассчитаем линейные скорости движения ленты конвейера, исходя из значений пределов регулирования времени выпечки: tmin=12 мин и tmax=72 мин.
Максимальная линейная скорость:
![]() м/с.
м/с.
Минимальная линейная скорость:
![]() м/с.
м/с.
Определим требуемое передаточное число редуктора. При этом будем
ориентироваться на асинхронный электродвигатель с короткозамкнутым ротором с pп=2, где: pп – число пар полюсов.
![]() .
.
Определим требуемое передаточное число редуктора

1.4. Расчетная схема механической части электропривода
Расчетная схема механической части электропривода приведена на рис.1.4.а. На схеме использованы обозначения:
Jэв – момент инерции приводного двигателя;
Jшк2 – момент инерции ведущего шкива (2);
Jшк3 – момент инерции ведомого шкива (3);
Jбвр – момент инерции быстроходного вала редуктора;
Jтвр – момент инерции тихоходного вала редуктора;
Jz5 – момент инерции звездочки (5);
Jz6 – момент инерции звездочки (6);
Jz7 – момент инерции звездочки (7);
Jz8 – момент инерции звездочки (8);
Jмуф – момент инерции предохранительной муфты (9);
Jz10 – момент инерции звездочки (10);
Jz11 – момент инерции звездочки (11);
Jпб – момент инерции приводного барабана(12);
Jр – момент инерции промежуточного ролика;
Jнб – момент инерции натяжного барабана;
m12 – масса участка ленты 1-2;
m23 – масса участка ленты 2-3;
m31 – масса участка ленты 3-1;
с12 – жесткость клиноременной передачи;
с23 – жесткость зубчатой передачи редуктора;
с34, с45, с56 – жесткость цепных передач;
стэк – эквивалентная жесткость тягового органа;
М – вращающий момент электродвигателя;
ω1…ω6 – угловые скорости вращения элементов кинематической цепи;
υ1…υ3 – линейные скорости движения участков цепи;
Мс1…Мс6 – статические моменты нагрузки;
Fc1…Fc3 –статические силы сопротивления движению.
В данной расчетной схеме не были учтены массы ремней клиноременной передачи, массы цепей цепной передач и жесткость предохранительной муфты.
Очевидно, что в данной расчетной схеме можно пренебречь жесткостью зубчатой передачи (с23) редуктора в связи с ее незначительностью. Так же пренебрежем жесткостью клиноременной передачи (с12) и жесткостями цепных передач (с34, с45, с56) в связи с малыми длинами ремней и цепей передач.
Очевидно, что механическую систему необходимо привести к двухмассовой системе из-за наличия податливости в тяговом органе (стэк). Однако в данном случае эти жесткости можно не учитывать по следующим причинам:
1. Конвейер имеет малую длину (15 м). Поэтому деформации упругих механических связей тягового органа будут незначительны. Согласно [3, 4] эти деформации проявляются при длине конвейера > 100 м.
2.
Конвейер будет
плавно разгоняться с малым ускорением а< 0.4 м/с2. Согласно [3]
механические колебания в тяговом органе возникают, если конвейер разгоняется с
ускорением а![]() 0.4 м/с2.
0.4 м/с2.
3. Т.к. внутри печи лента скользит по металлическим направляющим, то сила трения, возникающая между лентой и направляющими, будет демпфировать колебания в механической части электропривода.
На основании вышеизложенного можно сделать вывод, что данную механическую систему можно привести к одномассовой системе и податливость тягового органа можно не учитывать. Расчетная схема одномассовой системы электропривода приведена на рис.1.4.б. Определим радиус приведения:
![]() м.
м.
Определим приведенный момент инерции по формуле:
![]() .
.
Анализируя предыдущую формулу можно сделать вывод, что для определения суммарного момента инерции в первом приближении можно ограничиться первыми двумя слагаемыми, те моменты инерции вращающихся масс после редуктора будут малы из-за большого передаточного числа редуктора. Перепишем формулу (1.1) в виде:
 . (1.2)
. (1.2)
Т.к. редуктор и электродвигатель пока не выбраны, то суммарный момент инерции будет определен ниже.
2. ВЫБОР СИСТЕМЫ ЭЛЕКТРОПРИВОДА И АВТОМАТИЗАЦИИ
2.1 Расчет нагрузок механизма установки и построение нагрузочной диаграммы
2.1.1 Расчет нагрузок механизма и предварительный выбор редуктора
Широкая механизация и автоматизация производственных процессов различных отраслей народного хозяйства, как правило, связаны с механизацией и автоматизацией вспомогательных операций транспортировки руды, топлива, сырья, деталей машин, кормов, продуктов и т. д. Все большее применение для указанных целей находят транспортные механизмы непрерывного действия.
Механизмы непрерывного транспорта проще по своему устройству и эксплуатации, чем такие транспортные средства, как краны и подъемники, имеющие циклический характер нагрузки. По количеству перемещаемых грузов и длине трасс механизмы непрерывного транспорта часто могут успешно соревноваться с автомобильным и железнодорожным транспортом. Можно отметить, например, что в некоторых странах развитие конвейеростроения и канатных дорог превосходит по темпам развитие краностроения [4]. Помимо перемещения грузов, указанные механизмы могут быть использованы для перевозки пассажиров.
Наиболее распространенными механизмами непрерывного транспорта являются конвейеры различных типов, конструкция которых определяется главным образом характером перемещаемых грузов, весом и скоростью их движения. Среди конвейеров предприятий пищевой промышленности чаще других можно встретить ленточные конвейеры.
Основной конструктивной частью механизмов непрерывного транспорта и, в частности, любого конвейера является замкнутый, непрерывно движущийся в процессе работы тяговый орган, который выполняется из ленты специального изготовления (текстильной, прорезиненной, стальной и т. п.), цепей или канатов. Применение той или иной конструкции тягового органа обусловливается не только характером перемещаемого груза, но и условиями окружающей среды, в которой работает механизм. Тяговый орган обычно приводится в движение через ведущие барабаны, звездочки, многогранные блоки и подобные им устройства посредством электрических двигателей.
При движении конвейера приводной двигатель должен преодолевать статическую нагрузку, обусловленную силами трения во всех движущихся элементах, а также составляющую силы тяжести транспортируемого груза на наклонных участках конвейера. Силы трения возникают в подшипниках вращающих элементов, в местах контакта роликов и катков с опорой, в тяговом элементе при его изгибах и вследствие значительной протяженности конвейера и большого количества движущихся элементов составляют значительную часть суммарной статической нагрузки, а для горизонтальных конвейеров определяют всю статическую нагрузку привода. Поэтому расчеты сил трения при проектировании электропривода конвейеров следует выполнять весьма тщательно, так как именно эти силы определяют необходимую мощность и количество приводных двигателей.
Силы сопротивления движению конвейера можно разделить на две категории: силы не зависящие от натяжения тягового элемента, и силы зависящие от натяжения. Первые возникают на прямолинейных горизонтальных и наклонных участках и распределены по участку равномерно. Вторые возникают на участках изгиба тягового элемента и сосредоточены в рамках дуги этого участка.
Расчет фрикционного привода основан на решении, полученном еще Эйлером для неупругой гибкой нити. Впоследствии теория передачи силы трения была уточнена Н. П. Поповым и Н. Е. Жуковским [5]. Оба ученых независимо друг от друга и почти одновременно рассмотрели взаимодействие блока с гибкой нитью, обладающей определенной упругостью.
Общая схема конвейерной линии представлена на рис. 2.1
Расчет нагрузок механизма и предварительный выбор мощности электродвигателя будем производить по методике, изложенной в [3]. Исходные данные приведены в табл. 2.1.
Таблица 2.1.
| Производительность, П, кг/ч | 642 |
|
Масса погонного метра ленты, m л, кг |
18.2 |
|
Угол обхвата приводного барабана, α т, рад |
2.967 |
| Угол загрузки, β, рад | 0.174 |
| Коэффициент трения, μ | 0.35 |
|
Коэффициент сопротивления на участках изгиба, си |
0,6 |
|
Коэффициент сопротивления на прямолинейном участке, сп |
0,25 |
|
Допустимое ускорение, адоп , м/с2 |
0,4 |
Масса 1 кг транспортируемого груза в соответствии с заданной производительностью:
мг= =
=![]() =10.89 кг.
=10.89 кг.
Коэффициенты сопротивления движению на всех участках сгиба примем равными:
ки1=ки2=1+си=1+0.6=1.6.
Находим массы участков конвейера:
m12=(mл+mг)*l12=(18.2+10.8)*1.7=48.9 кг,
m23=(mл+mг)*l23=(18.2+10.8)*13.6=393.6 кг,
m31=mл*l31=18.2*15.3=277.7 кг.
Расчетная суммарная масса:
m∑=m12*ки1*ки2+m23*ки2+m31=1.62*48.9+1.6*393.6+277.7=1035.1 кг.
Рассчитаем силы сопротивления движению на прямолинейных участках:
ΔF12=(gл+gг)*l12*(сп*cosβ+sinβ)=(18.2*10.8)*9.81*1,7*(0,25*cos0.174+ sin0.174)=205.4 H,
ΔF23=(gл+gг)*l23*сп=(18,2+10,8)*9,81*13,6*0,25=965,3 H,
ΔF31=gл*l31*сп=18,2*15,3*0,25=681,1 Н.
Расчетное результирующее усилие на прямолинейных участках:
ΔFп=ки1*ки2*ΔF12+ки2*ΔF23+ΔF31=1.62*205,4+1,6*965,3+681,1=2751,4 Н.
Минимальное допустимое натяжение в точке сбегания ленты с приводного барабана из условия Эйлера:
Тсбmin= =
=![]() =11952.7 H.
=11952.7 H.
Так как при определении м∑ не учитывались массы барабанов и опорных роликов, то Тсб следует принять с некоторым запасом относительно значения Тсбmin:
Тсб=кзап* Тсбmin=1,4*11952.7=16733.7 Н.
Определим натяжение в точке набегания на приводной барабан:
Тнб=ки1*ки2*Тсб+ΔFп=1.62*16733.7+2751.4=45589.8 Н.
Для построения диаграммы тяговых усилий вычертим трассу конвейера со всеми подъемами и спусками, приводной и натяжной станциями, направляющим блоком и барабанами. Затем, если следовать от наименее нагруженного участка конвейера, производится учет потерь в каждом элементе и получается натяжение тягового органа по всей длине. На рис. 2.2 приведена диаграммы тяговых усилий ленточного конвейера.
Для расчета мощности приводной станции необходимо знать КПД кинематической цепи. Примем ориентировочные значения КПД элементов кинематической цепи из [6 ] ( табл 2.2).
Таблица 2.2.
|
КПД ременной передачи, ηрп |
0.95 |
|
КПД цепных передач, ηцп1=ηцп2=ηцп3 |
0.9 |
|
КПД предохранительной муфты, ηм |
0.98 |
|
КПД редуктора, ηр |
0.96 |
Суммарный КПД кинематической цепи привода:
ηкцπ∑=ηрп*ηр*ηцп1*ηцп2*ηм*ηцп3=0.95*0.96*0.9*0.9*0.98*0.9=0.65.
Мощность приводной станции определяется в соответствии с расчетной статической нагрузкой Fст и заданной скоростью движения конвейера:
Рс=![]() =1.1*
=1.1*![]() =805.8 Вт,
=805.8 Вт,
где: к3=1.1 – коэффициент запаса, учитывающий неточности расчета силы сопротивления и не учет динамических нагрузок привода при пуске и торможении.
Предварительный выбор редуктора будем производить по требуемому передаточному числу, определенному в пункте 1.3, и максимальной передаваемой мощности.
Выбираем из [6] редуктор типа Ц2-100-16-12-АУ2 со следующими паспортными данными (табл. 2.3.).
Таблица 2.3
| Максимальная передаваемая мощность, кВт | 2 |
| Передаточное число | 12.5 |
| Частота вращения быстроходного вала , об/мин | 750 |
| Номинальный КПД | 0.95 |
Определим передаточное число кинематической цепи с учетом реального передаточного числа редуктора:
iкц=iрп*iр*iцп1*iцп2*iцп3=2*12,5*4,72*3,44*2,42=1100.21.
Определим максимальную и минимальную угловые скорости вращения электродвигателя, исходя из диапазона регулирования и передаточного числа кинематической цепи:
ωэд.max= =
=![]() =145.2 с-1,
=145.2 с-1,
ωэд.min=![]() =
=![]() =26.4 с-1.
=26.4 с-1.
2.1.2 Расчет нагрузок механизма на холостом ходу
Расчет нагрузок механизма на холостом ходу будем производить по той же методике, что и загруженного привода, поэтому пояснения к расчету опускаются.
m12=mл*l12=18.2*1.7=31.3 кг;
m23=mл*l23=18.2*13.6 = 246 кг;
m31=mл*l31=18.2*15.3=277.7 кг;
m∑=ки1*ки2*m12+ки2*m23+m31=1.62*31.3+1.6*246.9+277.7=752.8 кг;
ΔF12=gл*l12*(сп*cosβ+sin(β))=18.2*9.81*1.724*(0.25*cos(0.174)+sin(0.174))==128.7 Н;
ΔF23=gл*l23*сп=18.2*9.81*13.6*0.25=605.5 Н;
ΔF31=gл*l31*сп=18.2*9.81*15.3*0.25=681.1 Н;
ΔFп=ки1*ки2*ΔF12+ки2*ΔF23+ΔF31=1.62*128.7+1.6*605.5+681.1=1979.7 H;
Тнб=ки1*ки2*Тсб+ΔFп=1.62*16733.7+1979.7=44818.1 H;
Fcmax=Тнб – Тсб=44818.1-16733.7 =28034.3 Н.
Определим момент сопротивления на валу двигателя приводной станции:
Мст=![]() =
=![]() =5.1 Н*м.
=5.1 Н*м.
КПД кинематической цепи является функцией загрузки и может быть апроксимирована по формуле [3]:
η кц=![]() ,
,
где: b – коэффициент постоянных потерь;
а – коэффициент переменных потерь;
kзаг – коэффициент загрузки.
kзаг=![]() =
=![]() =0.97;
=0.97;
b=![]() ;
;
a=γ*b=0.24*1.2=0.29;
где: γ – отношение коэффициентов переменных и постоянных потерь. Принимаем из [ ] γ=1.2
ηкцмах=![]() .
.
Момент сопротивления на валу электродвигателя при разгруженном конвейере:
Мcтхx=![]() =
=![]() =4.9 Н*м.
=4.9 Н*м.
Момент сопротивления на валу электродвигателя, создаваемый нагрузкой:
Мнаг=Мст-Мcmax=5.1-4.9=0.2 Н*м.
Как видно из последних расчетов, статический момент, создаваемый нагрузкой составляет ≈ 4% от суммарного статического момента. Это говорит о том, что почти вся мощность, передаваемая с вала электродвигателя, расходуется на преодоление сил трения в кинетической цепи и тяговом органе.
2.1.3 Построение нагрузочной диаграммы механизма
Конвейер относится к механизмаам непрерывного действия, для электропривода которого характерен продолжительный режим работы S1. Продолжительным номинальным режимом (S1) работы электрической машины называется режим работы ее при неизменной нагрузке такой, что превышения температуры всех частей электрической машины достигают установившихся значений [7}. Иллюстрация этого режима дана на рис. 2.3. В паспортных данных двигателей продолжительного номинального режима работы указываются номинальные мощности Рном,кВт, частота вращения nном, об/мин, напряжение Uном, В, ток Iном, А. Номинальному продолжительному режиму работы, как следует из рис. 2.3, соответствует простейший график превышения температуры, принимающей установившееся значение τу=∆Рном/А. Так как условиями номинального режима определено, что температура охлаждающей среды Θсреды, ном ≤ 40 °С, то температура лимитируется значением Θ ≤ Θсреды, ном + ∆Рном/А, при котором обеспечивается номинальный срок службы изоляции. Одновременно указанное значение является наибольшим для данного номинального режима. За время работы конвейера статический момент сопротивления остается постоянным. Для режима работы S1 время пуска и торможения мало по сравнению с обіим временем работы, и поэтому эти моменты в построении нагрузочной диаграммы не учитываются.
На основании сказанного выше можно построить нагрузочную диаграмму механизма конвейера (рис. 2.4.).
2.2 Предварительный расчет мощности двигателя
Мощность приводной станции определяется в соответствии с расчетной статической нагрузкой и заданной скоростьюдвижения конвейера была рассчитана в пункте 2.1.1. Однако следует учесть, что при длительном режиме работы на пониженной скорости ухудшаются условия охлаждения самовентилируемых двигателей. Поэтому нужно завышать мощность электродвигателя или применять принудительную вентиляцию. Последний вариант ведет к резкому увеличению капитальных затрат, поэтому выгодней завысить мощность электродвигателя. Методика определения допустимого момента по условиям нагрева приведена в [8]. Методика громоздкая требует знание параметров схемы замещения электродвигателя. Поэтому для предварительного выбора электродвигателя воспользуемся расчетными кривыми зависимости допустимого по нагреву момента от скорости вращения электродвигателей серии А, приведенными в этом же источнике (рис. 2.5.), причем нижней границе допустимых по нагреву моментов для всех двигателей единой серии является зависимость этого момента от частоты двигателя А91- 2. При Dω=6 α=1/6=0.17 получаем относительное значение допустимого по нагреву момента μτ=0.65. Следовательно, при выборе электродвигателя для данного диапазона регулирования и режима работы S1 следует увеличить расчетную мощность в 1/ μτ раз.
![]() .
.
K3охл – коэффициент запаса по условиям охлаждения.
Рэд=k3охл*Рс=1.53*805.8=1239.8 Вт.
2.3 Требования к автоматизированному электроприводу
Конвейеры в зависимости от их назначения и области применения могут эксплуатироваться в самых разнообразных условиях и в том числе крайне неблагоприятных: на открытом воздухе, на высоте над уровнем моря, превышающей 1000 м (ленточные конвейеры горнодобывающих предприятий, высокогорные канатные дороги), а также в помещениях, содержащих пары активных веществ и характеризующихся повышенной влажностью, загрязненностью, высокой температурой окружающей среды (красильные и сушильные линии, термические цехи) [3]. Это определяет необходимость использования для данной группы механизмов электрооборудования, по типу и исполнению отвечающего перечисленным условиям, и выдвигает жесткие требования в отношении безопасности и простоты его обслуживания, надежности работы. Это в первую очередь относится к приводным двигателям, которые, как правило, должны иметь закрытое исполнение и обладать повышенным пусковым моментом.
Непрерывный, однонаправленный характер работы рассматриваемых механизмов определяет длительный режим работы их электроприводов, которые выполняются нереверсивными, за исключением редких случаев, где требуется изменение направления движения, например для эскалаторов. Конвейеры строго транспортного назначения имеют одну неизменную скорость движения и не требуют регулируемого электропривода. Для некоторых конвейеров, обслуживающих технологические процессы, например для сборочных конвейеров, красильных и сушильных линий и т. п., где при смене собираемого или обрабатываемого изделия требуется изменение скоростного режима, применяется регулируемый электропривод.
В современном поточном производстве работа нескольких конвейеров может объединяться общим производственным процессом. В этом случае движения отдельных конвейеров должны быть строго согласованы между собой по скорости. Такая задача возникает, например, когда различные изделия после необходимых технологических операций на отдельных конвейерных линиях должны встречаться на сборочном конвейере в точном позиционном соответствии друг с другом. К электроприводам таких конвейеров предъявляются требования согласованного вращения.
Важным общим требованием, предъявляемым к электроприводам механизмов непрерывного транспорта, является обеспечение платности пуска и торможения с надежным ограничением ускорения и рывка, а также максимального момента двигателя и его производной [3]. Для канатных и ленточных конвейеров большой протяженности это требование обусловлено наличием больших поступательно движущихся масс, приведенный момент инерции которых может в 10-20 раз превышать момент инерции двигателей, и значительной податливостью тянущих канатов и транспортерной ленты. Большие маховые массы установки увеличивают возможность пробук-совывания приводных барабанов и шкивов относительно лент и канатов при пуске. Резкое приложение момента при наличии упругих механических связей вызывает механические колебания при пуске, в результате чего в ленте или канате возникают дополнительные динамические усилия. Требование плавности пуска и замедления остается в силе и для установок с коротким тяговым элементом. В одних случаях ограничение ускорения и рывка до требуемых норм диктуется условиями транспортирования людей (эскалаторы, канатные дороги), в других случаях — условием надежного сцепления транспортируемых изделий с лентой (ленточные конвейеры) или уменьшением раскачивания люлек и кабин (подвесные конвейеры).
На основании вышеизложенных рассуждений и описания технологического процесса сформулируем требования к электроприводу конвейера пода и системе автоматизации печи.
1. Электропривод должен обеспечить заданный диапазон регулирования скорости движения конвейера (D=6).
2. Система управления электроприводом должна обеспечить коррекцию скорости движения конвейера в зависимости от температуры во второй зоне пекарной камеры.
3. Электропривод должен обеспечить плавный разгон (торможение) конвейера с допустимым ускорением (замедлением), дабы избежать механических колебаний в тяговом органе (а доп=0.4 м/с2 ).
4. Электропривод должен обеспечить запас пускового момента для преодоления момента трогания – (1.8÷2.5)М ном.
5. В результате модернизации кинематическая схема электропривода должна претерпеть минимум изменений, чтобы уменьшить капитальные работы, в связи с модернизацией привода.
6. Т.к. установка работает в длительном режиме работы на всем диапазоне регулирования скорости движения, то электропривод должен обеспечить регулирование потребляющей мощности из сети, т.е. быть энергоэкономичным.
7. Т.к. электропривод работает в длительном режиме работы, то высокие требования к времени разгона и торможения не предъявляются.
8. Система автоматизации должна обеспечить контроль и регулирование температуры по зонам пекарной камеры.
9. Система управления электроприводом должна обеспечить исключение аварийных режимов для электропривода.
10. Электропривод должен быть удобен и гибок в управлении.
11. Система автоматизации должна обеспечить четкие действия схемы управления установкой при нормальном и аварийном режимах работы.
12. Система автоматизации должна быть простой и надежной в эксплуатации.
13. Система автоматизации и электропривод должны иметь минимальные размеры и стоимость.
14. Система автоматизации и электропривод должны соответствовать требованиям, предъявляемым ПУЭ и правилами пожарной безопасности.
2.4. Патентно–информационный поиск по объекту проектирования
1. Экономичный электропривод для Европы [9].
По данным комиссии ЕС Европа почти на 10 лет отстает от Северной Америки по применению двигателей (Д) с высоким КПД. Если бы все Д имели КПД, как у лучших кострукций, то необходимость в электроэнергии сегодня в Европе снизилась бы на 3000 МВт, расходы – на 1 млн. долларов и выбросы СО2 – на 13.4 млн.т. Если бы на всех насосах был установлен регулируемый ЭП, то эти цифры утроились бы. По данным ЕС широкое распространение Д с высоким КПД в 2010 году сэкономило бы в промышленном секторе еще 9.6 Т∙Вч. Высказано мнение, что КПД ЭП в большей степени зависит от системы управления. Представитель компании АВВ заметил, что улучшение технологии производства Д позволяет поднять их КПД без заметного удорожания Д и что компания выпускает Д с высоким КПД как стандартные. Ученые Италии разработали компьютерную программу оптимизации конструкции Д. Их работы показывают, что эксплуатационные расходы на Д оптимальной конструкции 1.5 кВт снижаются на 36%, 18.5 кВт – на 19% без повышения затрат на их производство. Рассмотрены пути внедрения Д с высоким КПД в Европе с помощью законодательства, агитации и др. методов.
2. Электропривод в будущем [9].
По имеющимся оценкам сегодня менее 5% ЭД управляется инвертором (И), даже среди недавно установленных ЭД эта цифра не превышает 10%. Для широкого распространения регулируемого электропривода (РЭП), по мнению представителей компании Hitachi (Япония), необходимо радикально изменить цены и конструкцию РЭП. В будущем РЭП регуляторы должны быть разделены на модульные элементы, которые комбинируются в зависимости от применения. С помощью обычных микросхем можно будет сформировать регулятор для специального назначения: упаковки, перекачки, вентиляции или производства стали. Маломощные РЭП должны встраиваться в инструмент или оборудование и их цена не должна превышать 10 ф.с. Не только в компании Hitachi считают, компания Mitsubishi уже продает встраиваемые И для производителей оборудования, причем И серии SC – А мощностью 200 и 400 Вт стоят меньше 80 ф.с. Отмечена большая экономия, которую может дать широкое применение РЭП в Европе; но если не применять мер по уменьшению засорения сети гармониками, стоимость фильтров будет больше стоимости самих И.
3. Применение преобразователя частоты VARISPEED – 676H5 для электропривода ленточного конвейера нового типа [9].
Описан многодвигательный ЭП системы ПЧ – АД ленточных конвейеров, выполненный на ПЧ VS – 67H5 / из серии VARISPEED. ШИМ-инвертор выполнен на IGBТ – приборах. Рассмотрено несколько вариантов исполнения конвейеров и их ЭП. Описана система управления, выполненная на цифровых процессорах и центральной ЭВМ, связанную в единую информационно-управляющую сеть с дисплеями. Системы могут иметь различное исполнение в зависимости от того, какой агрегат или технологическая линия обслуживаются данным конвейером.
4. Защита и техническая диагностика тиристорного ЭП ленточного конвейера [9].
В настоящее время конвейерные линии угольных шахт практически полностью автоматизированы. При этом автоматизация сводится к тому лишь к автоматическому запуску и аварийному останову. Следующим этапом автоматизации должно являться регулирование скорости движения ленты, что при неравномерном грузопотоке из забоев устранит недогрузы конвейера и его холостой пробег за счет автоматической стабилизации погонной нагрузки. Для регулирования скорости движения ленты наиболее целесообразным, в настоящее время, является тиристорный ЭП на основе АВК. С целью повышения надежности АВК рассмотрена структура микропроцессорного устройства, предназначенного для защиты и диагностирования ЭП на основе АВК.
5. Печь БН-25.[10]
Она состоит из восьми секций длиной 1.5 м каждая. Пекарная камера печи на четыре тепловые зоны. Обогрев осуществляется при помощи трубчатых электронагревателей ТЭНов ) мощностью 1.8 кВт каждый. Мощность электронагревателей, размещенных над сетчатым подом, составляет 91,8 кВт, а под ним— 59,4 кВт.
Для обогрева первой зоны установлено 18 верхних и 12 нижних электронагревателей; второй— 15 верхних и 9 нижних; третьей — 12 верхних и 6 нижних и четвертой — 6 верхних и 6 нижних.
Устройство для увлажнения расположено в начале печи и состоит из четырех перфорированных труб с отверстиями 2,5 мм. Трубы установлены на расстоянии 220 мм до пода с шагом 130 мм. Над трубами размещен колпак шириной 2,67 м и длиной 0,56 м. Пароувлажнительное устройство отделено от пекарной камеры поворотной заслонкой.
По всей длине печи, в верхней ее части, смонтирован металлический вентиляционный канал диаметром 160 мм.
Привод печи осуществляется от трехскоростного электродвигателя мощностью 0,8, 1,0 и 1,2 кВт с частотой вращения соответственно 750, 1500 и 3000 об/мин. Продолжительность выпечки в интервале каждого диапазона регулируется вариатором скорости.
6. Печь БН-50 [10].
Она состоит из шестнадцати соединенных между собой секций длиной по 1500 мм. Каждая пекарная камера изолирована стекловатой толщиной с боков 350, снизу — 245 и сверху — 450 мм. Обогрев осуществляется трубчатыми электронагревателями мощностью 2 кВт каждый. В верхней части над сетчатым подом размещено 87 электронагревателей, в нижней — 72. Печь разбита на четыре тепловые зоны с независимым верхним и нижним обогревом.
7. Печи ХПС-25 и ХПС-40 [ ].
Это печи тоннельного типа с электрообогревом предназначены для выпечки широкого ассортимента хлебобулочных изделий в районах с достаточными ресурсами дешевой электроэнергии. Печи ХПС-25 и ХПС-40 разработаны ВНИИХПом и изготовляются на базе печей ПХС-25 м и ПХС-40м.
Электрическая схема печи рассчитана на подключение сети трехфазного переменного тока напряжением 380/220 В. Для обогрева печи применяются типовые трубчатые электронагреватели, которые защищаются от коротких замыканий автоматическими выключателями типа А-3114 и АП50-ЗМТ. Электрическая схема печи предусматривает три цепи управления: температурным режимом печи, конвейером печи и вентилятором.
Цепь управления температурным режимом печи включает восемь одинаковых регулирующих контуров, состоящих из датчиков термопары ТХК-0515 (печь ХПС-25), термопары TXK.-XIII (печь ХПС-40), вторичных приборов (потенциометры ЭПВ2-11А) и исполнительных механизмов (магнитные пускатели серии ПА).
Пекарная камера печи разбита на четыре зоны, в каждой из которых производится самостоятельное регулирование и контроль температуры. В первой зоне печи (верх и низ) нагреватели разбиты на две группы, которые могут включаться вручную или в автоматическом режиме. В нижней части первой зоны, а также в остальных зонах нагреватели разбиты на две группы, которые управляются автоматически. При температуре в зоне ниже заданной автоматически включаются все нагреватели и по достижении нижнего предела заданной температуры одна из групп отключается, а при достижении верхнего предела заданной температуры отключается вторая группа.
Ручное управление предусматривает два режима работы: слабый нагрев, сильный нагрев. После разогрева печи до рабочего состояния систему управления печью переводят с ручного режима на автоматический. В соответствии с сортом выпекаемых изделий температура выпечки устанавливается на верхней шкале потенциометра для каждой зоны.
8. Печь ХПС-100 [10].
Она разработана Отраслевой лабораторией по хлебопекарным печам КТИППа и предназначена для выпечки широкого ассортимента хлеба и булочных изделий. В печи в целях унификации использованы узлы и отдельные элементы печей ПХК.
Сетчатый под печи крепится как и в печах ПХК к двум ведущим цепям. В зоне увлажнения сетчатый под перемещается по куполообразной траектории с регулируемым подъемом купола, что обеспечивает прохождение тестовых заготовок в зоне высокой влажности парового колпака.
Обогрев пекарной камеры осуществляется ТЭНами длиной 3 м.
В печи применена система секционной сборки. Секции имеют длину 4 м каждая и соединяются между собой компенсаторами температурных расширений.
Температурный контроль по длине пекарной камеры осуществляется в каждой тепловой зоне и зоне увлажнения.
9. Печь П-119м [10].
Она предназначена для выпечки широкого ассортимента хлебобулочных изделий, выпускается серийно Шебекинским машиностроительным заводом.
Печь является люлечно-подиковой тупиковой каркасно-панельного типа. Конвейер печи двухниточной, цепи конвейра втулочно-роликовые с шагом 140 мм. На них подвешено 18 люлек размером 1410 Х 285 мм. Печь снабжена съемными подиками размером 1402 Х 350 мм. Корпуса подшипников переднего приводного вала вынесены за пределы пекарной камеры и крепятся в нишах боковых панелей печи.
Обогрев печи осуществляется от нагревателей НВСЖ-2, 177/2,5 или другого типа. Мощность каждого нагревателя 2,5 кВт. Всего в печи 30 нагревателей, которые разбиты на три группы. Тепловой режим регулируется тремя термопарами как автоматически, так и вручную.
Боковые стенки печи и верхнее перекрытие изготовлены в виде пустотелых металлических панелей толщиной 250 мм, заполненных минеральной ватой. Между ветвями конвейера размещены вытеснительные короба, сокращающие объем парогазовой среды пекарной камеры. Тестовые заготовки увлажняются на первых четырех люльках.
В зоне увлажнения имеется дополнительная группа электронагревателей, которая включается при выпечка изделий требующих «обжарки» в начале выпечки.
10. Печь П-104 [10]
Печь люлечно-подиковая, тупиковая, изготовляется Шебекинским машзаводом. На двухниточном конвейере подвешено 34 люльки размером 1920 Х 350 мм, снабженных съемными подиками размером 1905 Х 360 мм.
Устройство печи П-104 идентично печи П-119М. Обогрев осуществляется 72 нагревателями НВСЖ-2,177/2,5 суммарной мощностью 180 кВт, которые разбиты на четыре зоны, где температура регулируется и контролируется самостоятельно. В первой зоне печи нагреватели разбиты на 3 группы, одна из которых может быть выключена. В других зонах нагреватели разбиты на две группы. Регулирование температуры автоматическое и ручной.
2.5 Предварительный выбор двигателя, способа управления и комплектного преобразователя
2.5.1 Выбор способа управления и двигателя
В настоящее время для приводов малой мощности (до 20 кВт) наибольшее применение нашли двигатели постоянного тока и асинхронные двигатели. Двигатели постоянного тока независимого возбуждения обладают отличными регулировочными свойствами. Это связано с тем, что магнитный поток регулируется независимо о тока якоря. В электроприводах с двигателями постоянного тока широкое распространение получили системы тиристорный преобразователь-двигатель постоянного тока (ТП-ДПТ). Это объясняется простотой и относительной дешевизной тиристорных преобразователей. ТП позволяют регулировать выходное напряжение в широких пределах и обладают высоким быстродействием. Эти обстоятельства позволяют строить на основе систем ТП-ДПТ высокопрочные системы регулирования технологических процессов (системы управления скоростью, положением и т.д.) Однако система ТП-ДПТ обладает рядом недостатков:
1. Недостатки двигателей постоянного тока в основном связаны с наличием коллекторного узла. ДПТ требуют тщательного технологического обслуживания (протирание коллектора, частые замены и регулирование щеток и т.д.), что увеличивает эксплуатационные расходы и снижает надежность машины.
2. ДПТ имеют плохие массогабаритные показатели, что в конечном итоге увеличивает цену двигателей. ДПТ дороже асинхронных двигателей примерно в три раза.
3. В связи с наличием коллекторного узда В ДПТ налагается ограничение на скорость нарастания тока, что уменьшает быстродействие электропривода.
4. Коэффициент мощности тиристорных преобразователей зависит от узла регулирования, поэтому при регулировании скорости вниз от номинальной увеличивает доля внешних гармоник, что ведет к снижению коэффициента использования двигателя, увеличению потель мощности и засорению питающей среды высшими гармониками (помехами).
Самым простым и надежным электромеханическим преобразователем энергии является асинхронный двигатель. Асинхронные двигатели обладают рядом преимуществ перед ДПТ:
1. Асинхронные двигатели просты и надежны в эксплуатации, требуют минимум эксплуатационных расходов.
2. Асинхронные двигатели имеют лучшие массогабаритные показатели, поэтому наиболее дешевы.
3. Асинхронные двигатели имеют больший КПД по сравнению с ДПТ при той же мощности.
4. Асинхронные двигатели выдерживают большие перегрузки по сравнению с ДПТ, что позволяет получить более высокое быстродействие.
Сравнивая достоинства и недостатки асинхронных двигателей и двигателей постоянного тока, для проектируемой установки выбираем асинхронный двигатель. Этот выбор обусловлен перечисленными преимуществами, а так же тем, что такое решение соответствует пункту 5 требований к электроприводу.
Рассмотрим самые распространенные способы управления АД.
1. Регулирование скорости вращения АД введением добавочного сопротивления в цепь ротора.
Один из распространенных способов регулирования скорости, тока и момента АД с фазным ротором связан с введением и изменением дополнительных резисторов в цепи его ротора. Схема, в которой реализуется этот способ регулирования, приведена на рис. 2.6, а. Основным достоинством этого способа является простота реализации, что определило его широкое применение в ряде электроприводов.
Для построения семейства получаемых при этом способе искусственных механических характеристик проведем анализ их характерных точек.
а) скорость идеального холостого хода АД ω0 при регулировании R2д не изменяется;
б) максимальный (критический) момент двигателя Мк также остается неизменным;
в) критическое скольжение Sк увеличивается при увеличении R2д.
Выполненный анализ позволяет представить искусственные реостатные характеристики в виде семейства кривых, показанного на рис. 2.6, б. Использование этих характеристик для регулирования скорости АД характеризуется такими же показателями, что и для ДПТ независимого возбуждения. Диапазон регулирования скорости небольшой - около 2-3, что определяется снижением жесткости характеристик и ростом потерь по мере увеличения диапазона регулирования скорости.
Плавность регулирования при реостатном регулировании небольшая и определяется плавностью изменения дополнительного резистора R2д. Скорость АД изменяется только вниз от основной. Экономичность способа определяется стоимостью используемых средств регулирования и расходами при эксплуатации электропривода. Затраты, связанные с созданием данной системы электропривода, невелики, так как для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время при эксплуатации этой системы затраты велики, поскольку значительны потери энергии.
Электрические потери в роторной цепи ∆Р2, называемые потерями скольжения, определяются выражением
∆Р2 = Р1 – Р2 = М*ω0 – М*ω = М*ω0*s =Р1*s.
Чем больше скольжение s, тем больше потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД электропривода.
Регулирование скорости этим способом применяется в тех случаях, когда требуется небольшой диапазон регулирования скорости и работа на пониженных скоростях непродолжительна. Например, этот способ нашел широкое применение в электроприводе ряда подъемно-транспортных машин и механизмов.
Рассматриваемый способ также используется для регулирования тока и момента АД при его пуске. Если обратиться к характеристикам рис. 2.6. б, то можно отметить, что за счет подбора сопротивления резистора пусковой момент АД может быть увеличен вплоть до значения критического момента Мк. Это свойство АД используется при его пуске с моментом нагрузки, превышающим пусковой момент АД Мп на естественной характеристике.
2. Регулирование скорости вращения АД переключением пар полюсов.
Этот способ (рис 6.7) используется для регулирования скорости многоскоростных АД с короткозамкнутым ротором. Возможность получения искусственных характеристик АД данным способом, и следовательно, регулирования его скорости, непосредственно следует из выражения для угловой скорости магнитного поля АД ω0 = 2*π*ƒ1/p.
Изменение числа пар полюсов АД р производится за счет переключении в обмотке статора, при этом число пар полюсов короткозамкнутого ротора изменяется автоматически. Так как количество полюсов АД может быть равным только целому числу— 1, 2, 3 и т. д., то следовательно, данный способ обеспечивает только ступенчатое регулирование скорости. Двигатели, допускающие регулирование скорости этим способом, получили название многоскоростных. Изменение числа полюсов АД достигается, когда на статоре АД располагаются две (или больше) не связанные друг с другом обмотки, имеющие разное число пар полюсов p1 и р2. При подключении к сети одной обмотки, например с р1 парами полюсов, АД имеет синхронную скорость
![]() 01 = 2*π*ƒ1/p1.
01 = 2*π*ƒ1/p1.
Вторая обмотка при этом обесточена. Для получения другой скорости отключается первая обмотка и подключается на сеть вторая обмотка с р2 парами полюсов, при этом синхронная скорость АД станет равной
![]() 02 =
2*π*ƒ1/р2
02 =
2*π*ƒ1/р2
и АД будет иметь уже другую механическую характеристику.
Наряду с такими АД, получившими название многообмоточных, широкое распространение получил другой тип многоскоростных АД, у которых изменение числа пар полюсов вращающегося магнитного поля достигается за счет изменения схемы соединения статорной обмотки АД. Для этого каждая фаза статора разделена на несколько одинаковых частей (чаще всего на две части) и имеет от них соответствующее число выводов.
Рассматриваемый способ регулирования скорости характеризуется рядом положительных показателей, что определяет широкое его применение в регулируемом электроприводе переменного тока. К ним в первую очередь следует отнести экономичность регулирования, так как регулирование скорости изменением числа пар полюсов не сопровождается выделением в роторной цепи больших потерь энергии скольжения, вызывающих излишний нагрев АД и ухудшающих его КПД.
Из рис. 2.7. б видно, что механические характеристики многоскоростных асинхронных электродвигателей отличаются хорошей жесткостью и достаточной перегрузочной способностью.
Недостатком этого способа является ступенчатость изменения скорости двигателя и относительно небольшой диапазон ее регулирования, не превышающий обычно 6-8.
3. Регулирование скорости вращения АД изменением питающего напряжения.
Одним из возможных способов регулирования координат АД является изменение напряжения на выводах его статора, при этом частота такого напряжения постоянна и равна частоте сети переменного тока. На рис. 2.8,а приведена схема электропривода при реализации этого способа. Между выводами питающей сети и статора АД включен преобразователь напряжения, при использовании которого может изменяться напряжение, подводимое к статору АД.
На рис. 2.8, б приведены механические характеристики АД при регулировании напряжения на выводах его статора. Как видно из этих графиков, получаемые искусственные характеристики оказываются малопригодными для целей регулирования скорости, так как по мере уменьшения напряжения резко снижаются критический момент АД и его перегрузочная способность, а диапазон регулирования скорости очень мал. По этим причинам разомкнутая схема может использоваться лишь для регулирования момента АД и его тока, который пропорционален напряжению статора. Для регулирования скорости АД создаются замкнутые системы.
Основными достоинствами рассматриваемой системы электропривода являются ее относительная простота, надежность, легкость автоматизации в общей технологической схеме производства, удобство управления. Вместе с тем эта система электропривода имеет существенный недостаток, заключающийся в больших потерях в обмотке ротора при работе на низких скоростях. Действительно, электрические потерн в роторе при низких скоростях и, следовательно, больших скольжениях могут быть весьма высокими, что уменьшает КПД электропривода. Отмеченный недостаток не является очень серьезным в том случае, когда время работы АД на пониженной скорости мало по сравнению со временем цикла его работы.
Диапазон регулирования скорости при использовании обратных связей, например по скорости, относительно высок и достигает десяти. При использовании обратных связей могут быть получены жесткие характеристики.
Экономичность регулирования зависит от конкретных условий работы электропривода. В частности, если время работы на пониженной скорости невелико по сравнению с временем цикла, то экономичность может быть высокой.
Регулирование скорости АД в этой системе плавное и производится только вниз от естественной (основной) характеристики.
4. Регулирование скорости вращения АД изменением частоты и амплитуды питающего напряжения.
Частотный способ является одним из наиболее перспективных и широко используемых в настоящее время способов регулирования скорости АД. Принцип его заключается в том, что, изменяя частоту ƒ1 питающего АД напряжения, можно в соответствии с выражением ω0 = 2*π*ƒ1/р изменять его синхронную скорость ω0, получая тем самым различные искусственные характеристики (рис 2.9, б). Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством: при регулировании скорости АД не происходит увеличения его скольжения, как это имеет место, например, при реостатном регулировании. Поэтому при этом способе регулирования потери скольжения оказываются небольшими, в связи с чем частотный способ наиболее экономичен.
Регулирование таким способом может осуществляться плавно, в широком диапазоне, в обе стороны от естественной характеристики, т.е. АД может иметь скорость как больше, так и меньше номинальной. При этом регулировочные характеристики имеют высокую жесткость, а АД сохраняет большую перегрузочную способность.
Во многих случаях хорошие показатели регулирования могут быть достигнуты в разомкнутой системе. При повышенных требованиях к электроприводу необходимо использование тех или иных обратных связей, т.е. применение замкнутой системы регулирования. Получаемый диапазон регулирования скорости в разомкнутых системах составляет 5-10, а в замкнутых его значение может достигать 1000 и более.
Из всех вышеперечисленных способов управления АД выбираем частотное регулирование, т.к.:
а) Система ПЧ-АД позволяет производить плавный пуск электропривода, что позволяет избежать механических колебаний в кинематической цепи, повышает ее надежность и срок службы.
б) Система ПЧ-АД позволяет регулировать скорость вращения во всем диапазоне без потери перегрузочной способности, чего не позволяет система ТРН-АД.
в) Система ПЧ-АД позволяет плавно регулировать скорость вращения во всем диапазоне, чего не позволяет осуществлять реостатное регулирование и регулирование переключением пар полюсов.
г) Система ПЧ-АД позволяет регулировать количество потребляемой мощности, что делает систему ПЧ-АД самой экономичной из перечисленных. Это свойство особенно важно в данной системе, т.к. электропривод работает на скоростях ниже номинальной продолжительное поддержания электродвигателя в режиме оптимального КПД. В данном случае такая экономия может оказаться существенной, т.к. статический момент равен приблизительно половине номинального момента на двигателе.
Выберем из [11] асинхронный двигатель для проектируемого электропривода. Мощность электродвигателя была рассчитана ранее. Выбираем АИР80В4 со следующими техническими данными (табл. 2.4):
Таблица 2.4
|
Рн, кВт |
Sн, % |
ηн |
сosφн |
λm |
λI |
R1, Ом |
J, кг·м2 |
| 1.5 | 0.07 | 0.77 | 0.83 | 2.2 | 6.5 | 5.46 |
3.3*10-3 |
По справочным данным рассчитаем основные номинальные параметры электродвигателя.
Ток статора:
![]() А.
А.
Угловая скорость вращения:
ωн=ωон*(1-Sн)=157.2*(1-0.07)=146.6 с-1,
где: ωон – номинальная скорость вращения магнитного поля.
Номинальный механический момент:
![]() .
.
Номинальный электромагнитный момент:
Мэмн=1.012*Ммехн=1.012*10.2=10.6 Н·м,
где: 1.012 – коэффициент, учитывающий добавочные потери и потери на трение в механической части электродвигателя.
2.5.2 Выбор комплексного преобразователя
Для проектируемого электропривода выбираем преобразователь частоты фирмы «Danfoss» серии VLT 5000. Фирма «Danfoss» выпустила первый в мире серийный преобразователь частоты в 1968 г. С тех пор фирма установила стандарт качества для электроприводов [12]. Ее частотные преобразователи VLT сегодня проданы и обслуживаются более чем в 100 странах на шести континентах. В новой серии преобразователей VLT 5000 заложена система управления VVCPLUS – это новая система векторного управления без датчиков управляющегося момента. По сравнению со стандартным управлением коэффициентом напряжение/частота система VVCPLUS обеспечивает улучшенную динамику и устойчивость как при изменении задания скорости, так и при изменении момента нагрузки. В системе управления ПЧ внедрена система цифровая защита, которая гарантирует надежную работу даже при самых неблагоприятных эксплуатационных условиях. Электроприводы фирмы «Danfoss» с системой управления VVCPLUS допускают ударные нагрузки во всем диапазоне скоростей и быстро реагируют на изменение задания. Чтобы сделать программирование простым и понятным, параметры разделены на различные группы. Быстрое меню проводит пользователя через программирование нескольких параметров, которые должны быть установлены, чтобы начать работу. Пульт управления съемный. Он включает алфавитно-цифровой дисплей из четырех строк, давая возможность отображать четыре параметра одновременно. Через съемный пульт управления запрограммированные значения могут быть скопированы с одного VLT на другой. Это уменьшает затраты времени на программирование при замене приводов или включении дополнительного привода в систему. Процесс программирования оказывается легче, чем в других сериях. Преобразователи VLT 5000 выполняют большинство настроек автоматически. ПЧ серии VLT 5000 построены на базе инверторов с промежуточным звеном постоянного тока и широтно-импульсной модуляцией. В качестве силовых ключей используются биполярные транзисторы с изолированным управляющим электродом (IGBT). Функциональная схема преобразователя частоты серии VLT 5000 представлена на рис. 2.10.
L, C1…C3 – входной LC фильтр, поставляемый по специальному заказу, служит для сглаживания импульсов входного тока, а так же блокирует высокочастотные помехи из сети в ПЧ и наоборот.
VD1…VD6 – неуправляемый выпрямитель для преобразования энергии переменного тока в энергию постоянного тока.
Rз – зарядный резистор для предварительного заряда конденсаторов силового фильтра С4…С6.
С4…С6 – силовые конденсаторы для фильтрации выпрямленного напряжения в звене постоянного тока.
Rs – резисторный датчик обратной связи по току инвертора для контроля тока инвертора, защиты инвертора от токов короткого замыкания.
VT1…VT6 – транзисторы силового тока инвертора, могут быть скомпонованы в виде полумостов.
М – асинхронный исполнительный двигатель.
ИБП – импульсный блок питания, обеспечивает несколько стабилизированных напряжений.
К – реле предварительного заряда. Включается после предварительного заряда силовых конденсаторов, шунтируя своим контактом резистор Rз.
БВВУ – блок верхних выходных усилителей.
БНВУ – блок нижних выходных усилителей.
БВВУ и БНВУ служат для формирования импульсов управления силовыми ключами.
БУИ – блок управления инвертором. Главный управляющий узел, который формирует на выходе 6 импульсных сигналов формирования ШИМ по различным алгоритмам. В соответствии с сигналами ОС, сигналами управления и выбранными комплексами программ БУИ выполняется на базе микропроцессорных контроллеров.
БИФ – блок интерфейса, обеспечивает связь схемы управления преобразователем с внешним устройством ЦПУ и АЛУ, персональным компьютером (РС), ведущим приводом MD, а также выдает сигнал для ведомого привода, если данный ЭП является ведущий.
БРИТ – блок реостатно-инверторного торможения.
RT – силовой тормозной резистор.
БРИТ и RТ поставляются по желанию заказчика.
Общие технические данные преобразователй частоты серии VLT 5000 [13] приведены в таблице 2.5:
Таблица 2.5
| Частота питания, Гц | 50/60 |
| Максимальный дисбаланс напряжения питания |
±2%Uн |
| Коэффициент мощности | 0.9…1.0 |
| Пусковой вращающий момент в течении 1 мин., % | 160 |
| Пусковой вращающий момент в течении 0.5 сек., % | 180 |
| Диапазон частот, Гц | 0…1000 |
| Разрешение на выходной частоте, Гц | ±0.003 |
|
Диапазон регулирования скорости: Разомкнутая система замкнутая система |
1…100 1…1000 |
| Число программируемых (по напряжению) аналоговых входов | 2 |
| Число программируемых цифровых и аналоговых выходов | 2 |
| Число программируемых цифровых входов | 8 |
Частотный преобразователь выбирается по току. Номинальный ток IVLT.N должен бать равен или больше требуемого тока двигателя (Iн = 3.56 А). Выбираем из [12] преобразователь частоты типа VLT 5003. Технические данные ПЧ VLT 5003 приведены в таблице 2.6.
Таблица 2.6.
|
Выходной ток: IVLT.N, A IVLT.MAX (60 c), A |
4.1 6.5 |
|
Выходная мощность, SVLT.N, кВт∙А РVLT.N, кВт |
3.1 1.5 |
| Выходное напряжение, В | 0…220 |
| Выходная частота, Гц | 0…1000 |
| Время разгона, с | 0.05…3600 |
3. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ РАЦИОНАЛЬНОЙ СИСТЕМЫ ЭЛЕКТРОПРИВОДА
Решение о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции.
В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также желательно сохранить неизменной конфигурацию оборудования и занимаемую им площадь.
Ниже рассмотрены некоторые системы привода конвейера печи.
Регулирование продолжительности времени выпечки может осуществляться механически при помощи блок-вариатора (существующий вариант). Тогда для реализации коррекции продолжительности выпечки на маховик вариатора необходимо установить регулирующий механизм (например, сервопривод ), который поворачивал бы маховик в ту или иную сторону, в зависимости от температуры. Такой вариант регулирования очень прост и требует минимальных капитальных затрат. Однако при частых поворотах ручки маховика будет сильно увеличиваться износ блок-вариатора, что в конечном итоге приведет к быстрому выходу вариатора из строя. Очевидно, что данный вариант регулирования нас не устраивает.
Лучшими показателями по сравнению с рассмотренным способом регулирования обладает электрическое регулирование продолжительности выпечки, т.е. изменением скорости вращения приводного двигателя конвейера.
В настоящее время наибольшее распространение получили системы электропривода ТП – ДПТ НВ (тиристорный преобразователь – двигатель постоянного тока независимого возбуждения) и ПЧ – АД (преобразователь частоты – асинхронный двигатель). Ниже приведена таблица [14], в которой методом экспертных оценок баллами определены рассматриваемые системы по ряду показателей:
Таблица 3.1.
| Система электропривода |
Р, кВт |
D |
M |
Кап. затраты |
Масса |
η, ΔР |
Qн, cosφн |
Ук |
Укэ |
|||
| – |
~ |
~ω2 |
двиг. | преобраз. | ||||||||
| ТП – ДТП НВ | от 10 до 10000 |
1:104 |
+ | + | ┴ | 3.5 | 2 | 2 | 2 | 3 | 2 | 3 |
| ПЧ –АД | до 10000 |
1:104 |
– | ┴ | ┴ | 3.0 | 1.5 | 2 | 1.5 | 2 | 2 | 2.5 |
Приняты обозначения: + – применяется, ┴ – ограниченно применяются, – – не применяются.
Здесь Ук и Укэ характеризуют соответственно ущерб от ненадежности и затраты на компенсирующие устройства (сглаживающие фильтры, дроссели и т.п.).
На основании оценок этой таблицы уже можно сделать вывод о применении асинхронного электропривода по ряду показателей: габаритам, КПД, потреблению электроэнергии, реактивной мощности, меньшим затратам на сетевые фильтры. Окончательно это будет решено после расчета технико-экономического эффекта. При этом необходимо учитывать ряд факторов, таких как большая ремонтнопригодность асинхронных двигателей. Также это прогрессивность применения преобразователей частоты, которые на данном этапе по трудоемкости и сложности ремонта ненамного превышают тиристорные преобразователи постоянного тока.
4. РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРОЦЕССОВ В ЭЛЕКТРОПРИВОДЕ
4.1 Построение нагрузочной диаграммы с учетом регулирования координат электропривода
Конвейер относится к механизмам непрерывного действия, для электропривода которого характерен продолжительный режим работы S1. За время работы конвейера статический момент остается постоянным. Для режима работы S1 время пуска и торможения мало по сравнению с общим временем работы.
Определим суммарный момент инерции по формуле [1.1]:
![]()
Выразим из уравнения движения электропривода:
![]()
время пуска электропривода до номинальной скорости:
![]()
где: Мдин= М – Мс= Мн – динамический момент электропривода.
Построим нагрузочную диаграмму электропривода (рис. 4.1).
4.2 Проверка выбранного электропривода по перегрузочной способности и нагреву
Целью данного расчета является определение максимального пускового момента электродвигателя, который должен быть больше момента трогания механизма. Механическая характеристика конвейера (или фрикционная характеристика) приведена на рис 4.2 (кривая 1). Однако аналитический расчет фрикционной характеристики очень громоздок и требует дополнительных сведений о элементах кинематической цепи [3]. Поэтому апроксимируем фрикционную характеристику прямыми линиями (хар-ка 2).
Здесь:
![]() – момент трогания;
– момент трогания;
![]() – минимальный момент;
– минимальный момент;
![]() – минимальная скорость.
– минимальная скорость.
Примем ![]() , тогда
, тогда
![]() .
.
Преобразователь частоты позволяет разгонять электродвигатель с пусковым моментом, равным критическому. Поэтому условие выбора электродвигателя по перегрузочной способности можно записать в виде:
![]() .
.
Допустимое угловое ускорение:
![]()
![]() ,
,
0.81λm*Mн=0.81*2.2*10.2=18.2Н·м.
Из расчетов видно, что условие выбора электродвигателя по перегрузочной способности выполняется.
Очевидно, что выбранный электродвигатель необходимо проверить по нагреву при работе по нижней скорости. По расчетным кривым (рис. 2.5) определим максимально-допустимый момент по условиям нагрева:
![]()
Получаем μ=0.64. Следовательно, при работе электропривода на нижней скорости максимально-допустимый момент по условию нагрева:
Мдоп=μ*Мн=0.64*10.2=6.5.
Условие проверки ЭД по нагреву Мдоп>Мст выполняется.
Проверка электродвигателя по нагреву, с учетом параметров схемы замещения будут приведен в пункте 6.
5. РАСЧЕТ И ПРОЕКТИРОВАНИЕ СИЛОВОЙ СХЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
5.1 Выбор сглаживающего дросселя
Силовая часть схемы преобразователя частоты представлена на рис. 2.10.
Для тока короткого замыкания применены дроссели, индуктивность которых выбирается из того, чтобы ограничить ток короткого замыкания на допустимом уровне в течении времени, пока сработает защита Т=10 мкс:
![]() мкГн . (5.1)
мкГн . (5.1)
Выбираем из [15] сглаживающие дроссели типа ФРОС-20. Паспортные данные дросселя приведены в таблице 5.1:
Таблица 5.1.
| L, мкГн |
Iн, А |
ΔP, Вт |
| 20 | 5 | 20 |
Рассчитаем активное сопротивление дросселя:
![]() Ом.
Ом.
5.2 Выбор силовых диодов
Выбор силовых диодов осуществляется по среднему току нагрузки:
![]() , (5.2)
, (5.2)
где: kф=1.6 – коэффициент формы, учитывающий несинусоидальность тока через диод;
kпер=1.4 – коэффициент запаса на перегрузку при изменении температуры;
kочл=0.8 – коэффициент, учитывающий отклонение условий охлаждения от номинальных.
Расчетное напряжение выбираемых диодов определяется по формуле:
![]() , (5.3)
, (5.3)
где: Umax – амплитуда выпрямленного напряжения;
kc – коэффициент, учитывающий возможное повышение напряжения сети;
k3н -- коэффициент запаса по напряжению.
На основе произведенных расчетов выбираем из [16] трехфазный диодный мост фирмы INTERNATIONAL RECTIFIER 26MT80 со следующими номинальными параметрами (табл. 5.2):
Таблица 5.2.
|
Uобр.max, B |
I, A | ΔU, B |
Ijmax, A |
IFSM, A |
Rthjc, К/Вт |
| 3001 | 25 | 1.26 | 40 | 300 | 1.42 |
Из выражения теплового равновесия следует:
 , (5.4)
, (5.4)
где: Uпр – прямое падение напряжения на диоде;
Т0 – температура окружающей среды;
Тjmax – максимальная температура перехода;
Rthjc – тепловое сопротивление переход-среда.
Rthja≈3* Rthjc=3*1.42=4.26 °С/Вт,
 , (5.5)
, (5.5)
![]() .
.
Условие выбора диодов по току соблюдается.
5.3 Выбор конденсатора силового фильтра
Расчет емкости конденсаторов силового фильтра осуществляется по формуле :
![]() , (5.6)
, (5.6)
где: Ud – среднее значение выпрямленного напряжения;
Тн – постоянная времени нагрузки;
Rн – активное сопротивление нагрузки;
ΔUc – допустимое повышение напряжения на конденсатора,
ΔUc=0.1*Ud=38В,
![]() .
.
Для набора указанной емкости
потребуется три конденсатора К50-17 350В, 1500 мкФ ![]() .
.
Определим номинал резистора, ограничивающего зарядный ток
конденсаторов:
![]() ,
,
где: Δt – время заряда конденсатора, принимаем Δt=1с.
![]() .
.
Мощность резистора – 150 Вт.
Определим величину разрядных резисторов:
![]() ,
,
где: Т – постоянная времени разряда, принимаем Т=60с.
![]() .
.
Выбираем из [17] резисторы МЛТ-2 – 15кОм –10Вт ±10%
5.4 Выбор силовых транзисторов
Выбор силовых транзисторов осуществляется по среднему току нагрузки и напряжению:
![]() ,
,
где: kф, kпер, kохл – коэффициенты (см. формулу 5.2)
![]() ,
,
где: kпер – коэффициент, учитывающий перенапряжения на транзисторах (принимаем kпер=1.5);
kc, k3н – коэффициенты (см. формулу 5.3).
Выбираем из [16] силовые IGBT-транзисторы типа IRGPH30MD2 фирмы INTERNATIONAL RECTIFIER со следующими номинальными данными (табл. 5. 3):
Таблица 5.3.
|
Uкэ, B |
Uкэпр, В |
Iк,А при Т,°С |
Рmax, Вт |
|
| 25° | 100° | |||
| 1200 | 4.6 | 6.9 | 4.5 | 60 |
Проверим транзисторы по расчетному току при максимальной температуре (150 °С):
 , (5.6)
, (5.6)
где: Тj – температура кристалла;
Тс – температура окружающей среды;
Rпр – сопротивление перехода коллектор-эмиттер в открытом состоянии.
![]() .
.
Определим потери, которые могут рассеяться в транзисторе:
 , (5.7)
, (5.7)
из них потери на переключение составляют:
ΔPком=Wпер*fк=2.18*10-3*5*103=10.9Вт,
где: Wпер – потери энергии при переключении;
fк – несущая частота.
Потери от рабочего тока нагрузки:
ΔР= ΔР- ΔРком=53.8-10.9=42.9Вт.
Допустимый средний ток нагрузки:
 . (5.8)
. (5.8)
Условие выбора транзисторов выполняются, т.к. Iдоп>Iрасч.
5.5 Выбор конденсаторов входного фильтра
Выбор входного фильтра служит для подавления помех, создаваемых при работе преобразователя. Его передаточная функция имеет вид:
![]() ,
,
![]()
![]() . (5.9)
. (5.9)
где: Т1, Т2 – постоянные времени;
L – индуктивность сглаживающего дросселя;
R – активное сопротивление преобразователя и сглаживающего дросселя;
С – емкость конденсаторов фильтра.
Активное сопротивление преобразователя определим по его техническим данным.
Активная мощность на выходе преобразователя:
![]()
Потери активной мощности в преобразователе:
![]() Вт.
Вт.
Найдем активное сопротивление преобразователя:
![]() Ом.
Ом.
Найдем суммарное активное сопротивление преобразователя и фильтра:
R=Rп+Rдр=3.1+0.8=3.9 Ом.
Емкость фильтра определим из условия, что электромагнитные процессы в фильтре не будут носить колебательный характер. Для этого необходимо, чтобы корни характеристического уравнения
Т1*р+Т2*р+1=0
были действительными
![]() ,
,
Т2>2*Т1. (5.10)
Подставим (5.9) в (5.10) и запишем условие выбора емкости:
![]() . (5.11)
. (5.11)
Подставим в (5.11) значения параметров и выберем емкость конденсаторов фильтра:
![]() .
.
Выбираем два конденсатора К50-17350В, 1500 мкФ, соединенных последовательно.
5.6 Выбор тормозного резистора
На тормозном резисторе рассеивается энергия, передаваемая из двигателя в звено постоянного тока преобразователя частоты при торможении. Он необходим для качественного и быстрого торможения. Для проектируемого электропривода в нормальном режиме работы время торможения не лимитируется. Однако торможение электропривода в аварийном режима должно происходить как можно быстрее. Поэтому заложим в проектируемый электропривод тормозной резистор.
Расчет сопротивления тормозного резистора будем производить по методике фирмы «Danfoss» [13].
Для расчета сопротивления необходимо определить пиковую мощность:
РРЕК=Рм*МBR(%)*ηм*ηVLT,
где: Рм – мощность приводного двигателя;
МBR(%) – соотношение от номинального, вращающегося момента. Принимаем МBR(%)=160%,
ηм – КПД двигателя,
ηVLT – КПД преобразователя частоты.
РРЕК=1500*1.6*0.77*0.96=1774 Вт.
Тормозное сопротивление рассчитывается по формуле:
![]() ,
,
где: UDC – напряжение в промежуточной цепи инвертора. Принимаем UDC=810В
![]()
6. ПРОЕКТИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
6.1 Математическое описание объекта управления
6.1.1 Математическое описание асинхронного электродвигателя из уравнений обобщенной машины
Электромеханический преобразователь (ЭМП) в структуре электропривода представляет собой идеализированный двигатель, ротор которого не обладает механической инерцией, не подвержен воздействию момента механических потерь и жестко связан с реальным ротором, входящим в состав механической части электропривода. Исследование процессов в ЭМП энергии обычно выполняют не непосредственно на конкретной конструкции, а на эквивалентных моделях. Благодаря тому, что в основе работы ЭМП автоматизированных электроприводов лежат одни и те же законы, появляется возможность создать универсальные общие модели для различных типов преобразователей. В этом смысле вращающиеся преобразователи можно разделить на две большие группы:
1) Преобразователи, у которых токи (или магнитные потоки) взаимно перемещающихся частей создаются с помощью источников энергии переменного тока.
2) Преобразователи, у которых одна часть (статор или ротор) возбуждаются от источника переменного тока, а другая – от источника постоянного тока.
Одной из наиболее распространенных технических реализаций ЭМП первой группы являются асинхронные машины. Ограничив рассмотрение только трехфазными машинами, используем следующие общепринятые допущения:
1) Параметры обмоток фаз ротора и статора соответственно одинаковы, а система напряжений фаз симметрична;
2) Магнитопроводы ненасыщены;
3) Воздушный зазор между взаимно перемещающимися частями ЭМП равномерный;
4) МДС в воздушном зазоре синусоидальна;
5) Влияние потерь в стали и эффекта вытеснения тока и потока на характеристики ЭМП не учитывается;
6) Обе части ЭМП имеют однотипные распределенные обмотки.
При других исполнениях одной из частей ЭМП (беличья клетка) ее параметры можно привести к эквивалентной распределенной обмотке. На рис. 6.1 дана первичная модель асинхронной трехфазной машины, изображаемая обычно в плоскости, перпендикулярной оси вала. Здесь условно изображены сечения обмоток фаз статора (присвоен индекс 1) и ротора (присвоен индекс 2), и оси этих обмоток, перпендикулярные их плоскостям. При подключении обмоток к источникам трехфазного переменного напряжения токи в обмотках будут определяться уравнениями равновесия напряжений:
![]()
![]()
![]() (6.1)
(6.1)
![]()
где: Ψ – полное потокосцепление обмоток соответствующих фаз,
R – активное сопротивление обмоток,
i – фазные токи обмоток,
u – фазные напряжения обмоток.
ЭДС dΨ/dt определяются изменением короткосцепленных обмоток во времени как под действием соответствующих токов во времени, так и под действием взаимного перемещения обмоток статора и ротора.
Поведение каждой из переменных исходной (приближенной к реальной конструкции) модели (рис 6.1) может быть описано как изменение во времени эквивалентных векторов переменных, направленных по осям фаз. Такому описанию соответствует эквивалентная модель машины, где реальные обмотки заменены эквивалентными сосредоточенными катушками, расположенными по осям фаз (рис. 6.2) и обладающими параметрами обмоток фаз. Для каждой фазы такой модели соотношение переменных удобно показать на векторной диаграмме, построенной для произвольно фиксированной частоты с учетом принятых ранее допущений (рис. 6.3).Кроме того, при построении векторной диаграммы параметры ротора были приведены к параметрам статора, а диаграмма построена для фиксированного момента времени, когда вектор фазного напряжения совпадает с осью фазы при вращении векторов против часовой стрелки. Эта диаграмма представляет своего рода математическую абстрактную модель, основанную на известном в электротехнике приеме изображения гармонических функций в виде вращающихся временных векторов. Реальные временные соотношения между переменными фазы определяются проекциями вращающихся векторов на ось фазы, а временные фазовые сдвиги между переменными соответствуют углам между векторами. Следует отметить, что для упрощения диаграмма построена для машины, возбуждаемой только со стороны статора.
Все векторы на диаграмме соответствуют реально существующим переменным, кроме намагничивающего тока Im. Этот ток определяет по модулю и фазе часть тока статора, которая проходя через обмотку с индуктивностью, равной взаимной индуктивности фаз статора и ротора Lm, создает в воздушном зазоре ЭМП рабочее потокосцепление Ψm. Полное же потокосцепление каждой
катушки (см рис. 6.2) определяется суммой рабочего потокосцепления и потокосцепления рассеяния (Ψ1σ или Ψ2σ). Поскольку потокосцепления определяются совокупным действием всех токов, то для мгновенных значений переменных фазы можно записать:
![]()
![]() ;
;
(6.2)
![]() .
.
Здесь L1=Lm+L1σ; L2=Lm+L2σ; L1, L2 – полные индуктивности статора и ротора соответственно; L1σ, L2σ – индуктивности рассеяния соответствующих фаз; Lm – взаимная индуктивность фаз статора и ротора, причем Lm в трехфазных машинах, благодаря взаимному влиянию всех трех фаз, в 3/2 раза больше взаимной индуктивности фаз статора и ротора при их соосном расположении.
Поскольку рабочее потокосцепление является общим для обмоток, как статора, так и ротора, то на основании (6.2), раскрывая полные индуктивности, можно записать для каждой фазы:
![]() ;
;
![]() .
.
Так как без учета активной составляющей тока холостого хода İ1+İ2≈ݵ, получим:
![]()
![]() ; (6.3)
; (6.3)
![]() .
.
Таким образом, рабочее потокосцепление можно выразить непосредственно через сумму токов статора и ротора:
![]() . (6.4)
. (6.4)
В уравнениях (6.2) – (6.4) все переменные – функции времени, выраженные через соответствующие временные векторы.
Под действием рабочих потокосцеплений обмоток всех (в нашем случае трех) фаз машины в воздушном зазоре формируется вращающееся магнитное поле, которое можно описать вращающимся эквивалентным пространственным вектором в плоскости, перпендикулярной оси вала. Учитывая, что переменные величины описываются временными векторами, пульсирующими по осям фаз (рис. 6.2), примем за начало отсчета времени момент прохождения рабочего потокосцепления фазы а через нулевое значение. Тогда для мгновенных значений рабочих потокосцеплений фаз можем записать:
![]()
![]() ;
;
![]() ; (6.5)
; (6.5)
![]() .
.
Считаем машину двух полюсной, что
общепринято при построении математических моделей. В этом случае угловая
частота сети ω1 будет соответствовать угловой скорости
магнитного потока в воздушном зазоре и, соответственно, синхронной скорости
ротора. Задав вначале ω1t=0 и для простоты построений приняв Ψmmax=1,
из (6.5), получим Ψma=0; Ψmb=-![]() ; Ψmc=
; Ψmc=![]() . Учитывая, что
рабочие потокосцепления фаз ориентированы по осям фаз и, сложив их
геометрически, получим (6.6) – результирующий пространственный вектор Ψ1
для момента времени ω1t=0 (рис. 6.4). Проделав ту же операцию
для ряда последовательных значений ω1t (ω1t=60°
и т.д.), можно показать, что результирующий пространственный вектор будет
вращаться со скоростью ω1t, а его амплитуда в
. Учитывая, что
рабочие потокосцепления фаз ориентированы по осям фаз и, сложив их
геометрически, получим (6.6) – результирующий пространственный вектор Ψ1
для момента времени ω1t=0 (рис. 6.4). Проделав ту же операцию
для ряда последовательных значений ω1t (ω1t=60°
и т.д.), можно показать, что результирующий пространственный вектор будет
вращаться со скоростью ω1t, а его амплитуда в ![]() раза больше модуля соответствующего
временного вектора фазы.
раза больше модуля соответствующего
временного вектора фазы.
Таким же образом мы можем получить результирующие пространственные всех электромагнитных переменных машины. Поскольку при формировании результирующих векторов геометрически складываются соответствующие временные векторы, ориентированные в пространстве по осям фаз и имеющие одинаковые фазовые сдвиги относительно других временных векторов собственной фазы, конфигурация пространственной векторной диаграммы машины будет такой же, как и у временной диаграммы фазы. На рис. 6.3 приведена пространственная временная диаграмма асинхронной машины при ее возбуждении только со стороны статора. Поскольку характеристики ЭМП определяются изменением амплитуд и взаимной ориентации векторов переменных, на рис. 6.5 начальная фаза векторов выбрана произвольно относительно координатных осей x, y, причем эти оси вращаются в пространстве с угловой скоростью ω1. Кроме того, пространственный угол δ между результирующими векторами рабочего потокосцепления и тока ротора по аналогии с синхронными машинами будем называть углом нагрузки. Так же принята система обозначений координатных осей: х – продольная ось, у – поперечная ось.
Для пространственной векторной модели, так же как и для первичной модели, можно написать уравнения равновесия напряжений:
![]()
 ;
;
(6.6)
 .
.
Здесь, как и на рис. 1.6 ![]() -- пространственные
векторы. Однако такие уравнения непосредственно нельзя решать совместно,
поскольку переменные статора записаны в статорной системе координат, а
переменные ротора (помечены верхним индексом (2)) в роторной системе, т.е.
вращаются относительно статора с угловой скоростью ω. В результате оси
статора и ротора сдвинуты относительно друг друга на переменный угол θ(t). Для того, чтобы привести уравнение
роторной цепи к неподвижным осям статора, необходимо вектор потокосцепления
ротора домножить на оператор поворота е-jθ, а затем «заставить» все векторы
уравнения ротора вращаться быстрее относительно ротора, увеличив их скорости на
угловую скорость ротора, т.е. умножить все члены уравнения ротора на оператор еjθ. Тогда получим:
-- пространственные
векторы. Однако такие уравнения непосредственно нельзя решать совместно,
поскольку переменные статора записаны в статорной системе координат, а
переменные ротора (помечены верхним индексом (2)) в роторной системе, т.е.
вращаются относительно статора с угловой скоростью ω. В результате оси
статора и ротора сдвинуты относительно друг друга на переменный угол θ(t). Для того, чтобы привести уравнение
роторной цепи к неподвижным осям статора, необходимо вектор потокосцепления
ротора домножить на оператор поворота е-jθ, а затем «заставить» все векторы
уравнения ротора вращаться быстрее относительно ротора, увеличив их скорости на
угловую скорость ротора, т.е. умножить все члены уравнения ротора на оператор еjθ. Тогда получим:
 ,
,
или:
 ,
,
где все величины записаны в координатах статора.
Учитывая, что ![]() , систему (6.6) перепишем в неподвижных координатах
статора:
, систему (6.6) перепишем в неподвижных координатах
статора:
![]()
(6.7)
Поскольку корректность математических
моделей не зависит от выбора координатных осей, но вид координат может
упростить анализ, обычно в зависимости от объекта и задач исследования выбирают
одну из трех координатных систем: неподвижную (6.7), синхронно вращающуюся в
пространстве со скоростью поля статора или вращающуюся со скоростью ротора.
Чтобы привести уравнение (6.7) к координатам, вращающимся в пространстве в
общем случае с произвольной скоростью ωĸ, можно воспользоваться тем же приемом, домножив переменные векторы на
оператор поворота ![]() , где θk – угол между координатной системой и
пространственными векторами. Тогда получим:
, где θk – угол между координатной системой и
пространственными векторами. Тогда получим:
![]()
 ;
;
(6.8)
 ,
,
где:
![]()
![]() ;
;
(6.9)
![]() .
.
В уравнениях (6.6) – (6.9) индекс принадлежности к координатным системам опущен, однако следует помнить, что они записаны в различных координатных системах.
При анализе удобнее использовать не непосредственно векторные уравнения, а уравнения в проекциях векторов на координатные оси. Обозначив эти оси х и у, запишем систему (6.8) в проекциях на оси:
![]()
![]() ;
;
![]() ;
;
(6.10)
![]() ;
;
![]() .
.
В этой системе уравнений четыре неизвестных тока и четыре потокосцепления. Для решения системы следует электромагнитные переменные выразить либо через потокосцепления, либо через токи. Выразим потокосцепления через токи, для чего спроецируем векторы потокосцеплений (6.9) на координатные оси:
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Учитывая симметрию асинхронной машины по осям х, у, перепишем (6.11) в виде:
![]()
![]() ;
;
![]() ;
;
(6.11)
![]() ;
;
![]() .
.
Электромагнитный момент, возникающий при взаимодействии токов и потоков взаимно перемещающихся частей ЭМП независимо от способов их возбуждения, определяется векторным произведением результирующего вектора рабочего потокосцепления в воздушном зазоре и результирующего вектора тока одной из частей ЭМП, например:
![]() . (6.12)
. (6.12)
Учитывая, что в ЭМП электромагнитные переменные взаимозависимы, электромагнитный момент можно выразить через любую пару векторов. Подставив (6.4) в (6.12), получим:
![]() . (6.13)
. (6.13)
Заменив в (6.13) im на i1+i2, получим:
![]() . (6.14)
. (6.14)
Проектируя векторное уравнение (6.14) на координатные оси х, у, получим для момента:
![]() . (6.15)
. (6.15)
При переходе к двухфазной модели согласно [18], выражение для электромагнитного момента запишем в виде:
![]() . (6.16)
. (6.16)
Движение механической части электропривода описывается уравнением:
![]() .
.
Запишем систему уравнений, описывающих электромеханические и механические процессы в асинхронном двигателе:
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
(6.17)
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
6.1.2 Математическое описание асинхронного электродвигателя в установившихся режимах
Для анализа свойств асинхронных
двигателей в установившихся режимах обычно используют схему замещения фазы
машины (рис. 6.7), соответствующую векторной диаграмме, приведенной на рис. 6.3
и общепринятые допущения, сформулированные ранее. На рис. 6.7.а символ S обозначает скольжение, а остальные
обозначения были использованы ранее. Однако эта схема неудобна для анализа при
переменной частоте, поскольку все сопротивления, кроме активного сопротивления
обмотки фазы статора R1, являются функциями частоты.
Поэтому, введя понятие относительной амплитуды ![]() и относительной частоты
и относительной частоты ![]() , выделим
переменные и параметры, перейдя к схеме замещения на рис.6.7.б. Здесь все
индуктивные сопротивления соответствуют номинальной частоте питающего
напряжения машины [ ]. Кроме того, скольжение S при переменной частоте не определяет однозначно степени
нагрузки машины, являясь еще и функцией частоты напряжения на статоре. Поэтому
его удобнее выразить через относительные частоты:
, выделим
переменные и параметры, перейдя к схеме замещения на рис.6.7.б. Здесь все
индуктивные сопротивления соответствуют номинальной частоте питающего
напряжения машины [ ]. Кроме того, скольжение S при переменной частоте не определяет однозначно степени
нагрузки машины, являясь еще и функцией частоты напряжения на статоре. Поэтому
его удобнее выразить через относительные частоты:
![]() , (6.18)
, (6.18)
где: ![]() – абсолютная и относительная частоты токов ротора.
– абсолютная и относительная частоты токов ротора.
Используя схему замещения, найдем выражения для действующих значений электромагнитных переменных. Ток фазы статора:
 (6.19)
(6.19)
Здесь U1н – номинальное фазное напряжение машины; х1=хm+х1σ – полное
индуктивное сопротивление контура статора при разомкнутом роторе; х2=хm+х2σ – полное
индуктивное сопротивление контура статора при разомкнутом статоре; ![]() – коэффициент
рассеяния.
– коэффициент
рассеяния.
Кроме того, нужно иметь в виду, что роторные величины приведены к статорным, хотя индекс приведения здесь и далее опущен.
Ток фазы ротора:
![]() . (6.20)
. (6.20)
Намагничивающий ток:
 . (6.21)
. (6.21)
Потокосцепление в воздушном зазоре:
![]() , (6.22)
, (6.22)
где ![]() -- конструктивная постоянная
статора;
-- конструктивная постоянная
статора;
kоб – обмоточный коэффициент;
ω1 – число последовательных витков одной фазы.
Уравнения электромагнитного момента можно получить, используя выражение либо для электромагнитной мощности, либо векторное уравнение (6.14). Рассмотрим первый путь.
Электромагнитная мощность будет:
![]() .
.
Подставляя сюда выражения (6.18) – (6.20), находим:
 ,
,
при этом для момента можем записать:
 . (6.23)
. (6.23)
Уравнения (6.19) – (6.23) описывают электромеханические свойства двигателя в установившемся режиме.
6.1.3. Составление структурной схемы частотно-регулируемого асинхронного двигателя
При исследовании асинхронных машин обычно используют одну из трех координатных систем: с привязкой осей к элементам конструкции статора (неподвижные оси); с привязкой осей к элементам конструкции ротора; оси, синхронно вращающиеся в пространстве. При этом основным принципом выбора координатной системы является простота математического описания электромагнитных процессов в машине.
При решении задач анализа и синтеза частотно-регулируемых электроприводов кроме этого принципа при выборе системы координат необходимо учитывать еще простоту математической модели автоматизированного электропривода, а это прежде всего определяется требованиями к управляемости, т.е. к качеству регулирования основных элементов – скорости и момента. С этих позиций координатные оси, ориентированные по элементам конструкции (статора или ротора), оказываются неудобными, поскольку в установившихся режимах электромагнитные переменные двигателя будут иметь частоты, отличные от нуля, а исследование системы придется выполнять на несущей частоте. С этих позиций для частотно-регулируемых электроприводов любого типа наиболее удобными являются координатные оси, синхронно вращающиеся в пространстве. В этом случае в установившихся режимах пространственные вектора электромагнитных переменных оказываются неподвижными относительно осей, а их проекции на оси – скалярными величинами, что позволяет при анализе и синтезе использовать методы и аппаратурные средства, хорошо разработанные для электроприводов с двигателями постоянного тока.
Более того, в синхронных осях появляется дополнительная возможность упрощения математических моделей как двигателя, так и электропривода в целом за счет привязки координатных осей к одному из пространственных векторов электромагнитных переменных. В зависимости от выбранного для ориентации координатных осей опорного вектора можно построить одну из семи структурных схем асинхронной машины – в координатах u1, i1, i2, Ψ1, Ψ2, Ψm или er и соответствующие им структурные схемы частотно-регулируемых электроприводов. Если рассматривать структурные схемы только асинхронных двигателей с точки зрения их простоты и возможностей организации управления, предпочтительными являются структуры с ориентацией по Ψ1, Ψ2.Структуры с ориентацией по токам i1, i2 имеют наименьшее число перекрестных связей, однако формирование сигналов по ω1 здесь наиболее сложно. Структура с орентацией по u1 содержит большее число перекрестных связей и блоков умножения, но формирование входных воздействий здесь проще, чем в остальных структурах. В тоже время при выборе координатной системы для частотно-регулируемых приводов с короткозамкнутыми асинхронными двигателями следует учитывать, что ток ротора в таких системах измерить невозможно, а поэтому одной из целесообразных здесь могут быть структуры в координатах u1, Ψ2 или i2.
Кроме того, при выборе координатной системы не следует забывать и о физической реализации самой системы. А с этих позиций, какие бы координатные системы не использовались при построении структурной схемы электропривода, аснхронный двигатель управляется амплитудой, фазой и частотой реальных фазных напряжени; поэтому чем больше преобразований претерпевают эти переменные при переходе к эквивалентной модели, тем больше координатных и функциональных преобразований необходимо выполнить в каналах формирования реальных сигналов управления, и эти усложнения должны быть технически оправданы. Следовательно, если иметь в виду электропривод с асинхронным короткозамкнутым двигателем, то окончательный выбор одной из координатных систем (u1, Ψ2, i2 ) должен определяться требованиями к качеству регулирования в статических и динамических режимах.
Как известно, электромагнитные переходные процессы в асинхронном двигателе носят колебательный характер, причем колебания свободной составляющей электромагнитного момента определяются прежде всего колебаниями фазовых сдвигов токов. Поэтому в быстродействующих электроприводах, где качания электромагнитного момента жестко нормированы, необходимо организовать управление не только по амплитуде напряжений (токов), но и по фазе тока. В этом случае в системах с управлением по напряжению для частотно-регулируемых электроприводов с асинхронными короткозамкнутыми двигателями целесообразны структуры с ориентацией по Ψ1. Если требования к быстродействию позволяют уменьшить амплитуду качаний момента за счет снижения форсировки, то можно воспользоваться координатами, ориентированными по u1, и перейти на управление только по уровням напряжений, токов и потокосцеплений. В этом случае более сложная структурная схема двигателя оправдывается существенным упрощением информационной части системы.
На основании выше изложенных
рассуждений выбираем систему координат, вращающихся в пространстве с угловой
скоростью вектора тока статора (х,у) и ось х с осью вектора напряжения ![]() . Тогда для
описания электромагнитных процессов воспользуемся системой уравнений (6.17),
учтя при этом: ω2=ω1–pп*ω, u1x=U1m, u1y=0:
. Тогда для
описания электромагнитных процессов воспользуемся системой уравнений (6.17),
учтя при этом: ω2=ω1–pп*ω, u1x=U1m, u1y=0:
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
(6.25)
![]() ;
;
![]() ;
;
![]() .
.
Преобразуем систему (6.25) по Лапласу и получим:
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
(6.26)
![]() ;
;
![]() ;
;
![]() .
.
Преобразуем систему (6.26) к виду:
![]()
![]() ;
;
![]() ;
;
(6.27)
![]() ;
;
![]() .
.
Выразим из (6.27) токи:
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Разделим числитель и знаменатель первых двух уравнений на R1, а вторых двух – на R2, и введем обозначения постоянных времени:
![]() .
.
![]()
 ;
;
![]() ;
;
(6.28)
![]() ;
;
![]() .
.
Дополним систему (6.28) уравнением электромагнитного момента (6.16) и выразим скорость из уравнения движения, преобразуя, преобразуя их в операторную форму:
![]()
 ;
;
![]() ;
;
(6.29)
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
По системе уравнений составим структурную схему асинхронного электродвигателя и механической части электропривода (графическая часть: лист 4).
6.2 Расчет основных параметров для функциональной схемы САУ
6.2.1 Определение потерь мощности в электродвигателе
Энергетическая диаграмма электродвигателя представлена на рис. 6.8.
Расчет потерь мощности будем вести для номинального режима работы электродвигателя.
Потребляемая электрическая мощность:
![]() .
.
Добавочные потери мощности:
![]() .
.
Механические потери мощности:
![]() .
.
Механическая мощность:
![]() .
.
Электромагнитная мощность:
![]() .
.
Потери в меди ротора:
![]() .
.
Потери в меди статора:
![]() .
.
Потери мощности в стали ротора для номинального режима можно пренебречь, т.к. частота тока ротора для номинального режима составляет fн=f1н*Sн=50*0.067=3.4 Гц, поэтому потери в стали ротора пренебрежимо малы.
Потери мощности в стали статора:
![]() .
.
6.2.2 Расчет параметров схемы замещения
Расчет параметров схемы замещения будем производить согласно методике, изложенной в [18]. Расчет производится на основании системы уравнений электромеханического преобразователя в системе координат α, β, жестко связанных со статором. При расчете воспользуемся схемой замещения фазы асинхронного двигателя (рис. 6.7.а).
Абсолютное скольжение:
![]() ,
,
где: ω1н – номинальная угловая скорость вращения вектора тока статора,
ωн – номинальная угловая скорость вращения ротора,
pп – количество пар полюсов.
Электромагнитный момент одной пары полюсов:
![]() .
.
Амплитуда векторов тока и напряжения:
![]() А,
А,
![]() А.
А.
Номинальный sinφ:
![]() .
.
Проекция вектора потокосцепления статора на оси α и β:
![]() ,
,
![]() .
.
Амплитуда вектора потокосцепления статора:
![]() .
.
Определим коэффициенты:
![]() ,
,
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
 ,
,
![]() ,
,
![]() ,
,

![]() ,
,
![]() .
.
Рассчитаем параметры схемы замещения АД. Индуктивность обмотки статора:
![]() .
.
Взаимоиндуктивность между обмотками статора и ротора:
![]() .
.
Индуктивность обмотки ротора:
![]() .
.
Активное сопротивление обмотки ротора:
![]() .
.
Индуктивность рассеяния обмотки статора:
![]() .
.
Индуктивность рассеяния обмотки ротора:
![]() .
.
6.3 Синтез регулятора момента
По способу регулирования максимального момента электроприводы с асинхронными короткозамкнутыми двигателями можно разделить на две группы:
1) с независимым регулированием частоты;
2) с зависимым регулированием частоты.
При независимом регулировании частоты
основными переменными являются амплитуда (![]() ) и частота (
) и частота (![]() ) подаваемого на статор
напряжения (системы скалярного управления), а при зависимом –
) подаваемого на статор
напряжения (системы скалярного управления), а при зависимом – ![]() и
и ![]() – частота тока ротора
(системы векторного управления). В электроприводах с независимым управлением
частотой регулирование максимального момента обычно осуществляется за счет
изменения амплитуды напряжения при заданной частоте, причем частота, как
правило, принимаются за независимую переменную. Регулирование, как правило,
осуществляется в функции одной или нескольких переменных, а предельные
реализации управляющих воздействий называют законами частотного регулирования.
– частота тока ротора
(системы векторного управления). В электроприводах с независимым управлением
частотой регулирование максимального момента обычно осуществляется за счет
изменения амплитуды напряжения при заданной частоте, причем частота, как
правило, принимаются за независимую переменную. Регулирование, как правило,
осуществляется в функции одной или нескольких переменных, а предельные
реализации управляющих воздействий называют законами частотного регулирования.
В реальных установках организовать управление по тому, или иному закону чисто программным способом невозможно, а поэтому вопрос выбора закона частотного регулирования необходимо решать не только с позиций достижимого результата, но прежде всего с позиции его регулируемости, которая, как правило, определяется возможностями программного обеспечения. Непосредственно измерить в асинхронной машине с короткозамкнутым ротором можно напряжение и ток статора и скорость ротора. При частичной разборке машины можно поместить на статор датчик ЭДС. Непосредственное же измерение момента на валу двигателя обычно не используется из=за сложностей с размещением датчиков и съемов сигналов. Формирование сигналов обратной связи по ЭДС с помощью датчиков тока и напряжения дает удовлетворительную точность при напряжении и токе, близких к синусоидальным. В противном случае векторное сравнение сигналов с различным гармоническим составом, меняющимся и от управляющего воздействия и от нагрузки, может привести к недопустимым погрешностям.
Наиболее просто в частотно-регулиремом электроприводе организовать измерение напряжения и тока статора. Но поскольку напряжение является регулируемой переменной, то использование таких сигналов компенсирует падение напряжения в вентильном преобразователе линеализует его регулировочную характеристику, но не определяет закона регулирования.
На основании вышесказанного для проектируемого электропривода выбираем систему стабилизации момента с положительной обратной связью по току [ 18].
Функциональная схема стабилизации максимального момента приведена на рис. 6.9.а, где: У – усилитель, ПЧ – преобразователь частоты, ДТ – датчик тока, а двигатель показан состоящим из двух частей М1 и М2. Поскольку нас интересует регулирование тока статора и момента при заданных uf и f1, то выход по скорости не показан.
Структурная схема контура тока в
статистических режимах приведена на рис. 6.9.б, где: ![]() – коэффициент передачи
преобразователя, по напряжению:
– коэффициент передачи
преобразователя, по напряжению:
![]() ;
;
![]() – коэффициент передачи двигателя
по току;
– коэффициент передачи двигателя
по току;
![]() – коэффициент передачи датчика
тока,
– коэффициент передачи датчика
тока,
![]() ;
;
kу – коэффициент усиления регулятора момента.
На основании структурной схемы для тока статора можно записать:
 . (6.30)
. (6.30)
Из общего уравнения электромеханической характеристики (6.19) найдем:
![]() . (6.31)
. (6.31)
Подставив (6.31) в (6.30), получим уравнение электромеханической характеристики с положительной обратной связью в канале регулирования амплитуды напряжений:
 . (6.32)
. (6.32)
Подставив (6.32) в (6.20), запишем уравнение механической характеристики исследуемой системы:
 . (6.33)
. (6.33)
Уравнения (6.32), (6.33) неудобны для
расчетов, поскольку содержат две независимые входные переменные u3 и ![]() . В то же время система управления
частотно-регулируемым приводом строится таким образом, что без обратной связи
обеспечивается пропорциональный закон регулирования
. В то же время система управления
частотно-регулируемым приводом строится таким образом, что без обратной связи
обеспечивается пропорциональный закон регулирования ![]() , а обратная связь корректирует
закон изменения напряжения относительно частоты. В этом случае:
, а обратная связь корректирует
закон изменения напряжения относительно частоты. В этом случае:
![]() ,
(6.35)
,
(6.35)
где: u3н – номинальный сигнал задания.
С учетом (6.35) перепишем (6.32) и (6.33):
 , (6.36)
, (6.36)
 . (6.37)
. (6.37)
Аналитическое определение коэффициента усиления весьма сложно, что обусловлено сложностью функции в знаменателе (6.37), а также тем, что на входе системы сравнивается сигнал управления скоростью с сигналом управления по току статора, в общем случае не зависящем от скорости, что требует функциональной зависимости ky(u3).
Однако расчеты можно упростить без существенного снижения качества синтезирующей системы, исходя из следующих соображений:
1)
В реальных
системах нет необходимости точно соблюдать условие Мк=Мдоп,
а достаточно обеспечить Мк>Мтр во всем диапазоне
регулирования ![]() , где Мдоп и Мтр
– максимальный допустимый момент двигателя и требуемый по условию
перегружаемости момент. Мдоп ограничивается насыщением
магнитопровода машины.
, где Мдоп и Мтр
– максимальный допустимый момент двигателя и требуемый по условию
перегружаемости момент. Мдоп ограничивается насыщением
магнитопровода машины.
2)
При этом, даже
если на отдельных уровнях ![]() будем иметь Мк>Мдоп,
то перегрузки в автоматизированном электроприводе обычно снимают задержанными
обратными связями и другими средствами внешней информационной системы.
будем иметь Мк>Мдоп,
то перегрузки в автоматизированном электроприводе обычно снимают задержанными
обратными связями и другими средствами внешней информационной системы.
3)
Благодаря
сочетанию свойства асинхронного двигателя терять перегружаемость при снижении ![]() и свойства
положительной обратной связи по току увеличивать форсировку при снижении u3 появляется возможность отыскать такие оптимальные
значения ky=const, при которых обеспечивается условие Мк>Мтр
во всем диапазоне
и свойства
положительной обратной связи по току увеличивать форсировку при снижении u3 появляется возможность отыскать такие оптимальные
значения ky=const, при которых обеспечивается условие Мк>Мтр
во всем диапазоне ![]() . Это подтверждают и функции в
знаменателе (6.36) и (6.37), предельные значения которых будут
. Это подтверждают и функции в
знаменателе (6.36) и (6.37), предельные значения которых будут
![]() и
и  .
.
С учетом сказанного определение искомых параметров будем выполнять по следующей схеме:
1.
Исходя из условий
![]() и
и ![]() , строим
механические характеристики для
, строим
механические характеристики для ![]() , которые в дальнейшем будем
называть естественными характеристиками частотно-регулируемого электропривода.
Для построения используем (6.23) с подстановкой
, которые в дальнейшем будем
называть естественными характеристиками частотно-регулируемого электропривода.
Для построения используем (6.23) с подстановкой ![]() ,
, ![]() ,
, ![]() , предварительно найдя значения
членов формулы:
, предварительно найдя значения
членов формулы:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 . (6.38)
. (6.38)
Результаты расчета представлены в виде графика на рис.6.10.
2. Для этих же частот построим предельные по условиям насыщения механические характеристики с потокосцеплением Ψm=const, выбранным за предельное. Эти характеристики построим по формуле из [18] при условии Iμ=Iμн=const:
 , (6.39)
, (6.39)
где номинальный намагничивающий ток определен по (6.21):
Результаты расчета представлены в виде графика (рис.6.10).
3.На характеристиках, соответствующих ![]() , проводим горизонталь ab (рис. 6.10), соответствующую
, проводим горизонталь ab (рис. 6.10), соответствующую
![]() .
.
Точкам любых характеристик с f1min=const,
лежащих на линии ab, будет
соответствовать условие ![]() .
.
4. На линии ab задаем Mтр=Mc<Mпред=Mн, т. е. Момент, обеспечивающий устойчивую работу электропривода на нижней скорости. По уравнению для механической характеристике при Ψm=const [18]:
![]() . (6.40)
. (6.40)
Найдем Iпред,
соответствующее Mпред при ![]() на линии ab и выбранном Iμ:
на линии ab и выбранном Iμ:
 .
.
Учитывая, что при ![]() и
и ![]()
 , (6.41)
, (6.41)
найдем ток статора в расчетной точке:
 .
.
Подставив найденный ток в (6.36), найдем искомый коэффициент усиления ky:
6.4 Построение статических характеристик электропривода
По уравнению (6.19) построим естественную электромеханическую характеристику электропривода:
 . (6.42)
. (6.42)
Результаты расчета представлены в виде графика (рис.6.11).
Естественная механическая характеристика была построена в пункте 6.3.
Для построения искусственных статических характеристик на основании структурной схемы запишем выражение для напряжения:
![]() . (6.43)
. (6.43)
Подставим в (6.43) выражение для тока (6.19):
 . (6.44)
. (6.44)
Из уравнения (6.44) выразим U1 и запишем выражение:
 . (6.45)
. (6.45)
При построении искусственных статических характеристик следует учесть ограничение подводимого к электродвигателю напряжения. Напряжение U1 будем ограничивать на уровне U1max=1.1 U1н.
Составим систему уравнений для построения искусственных механических и электромеханических характеристик электропривода:
![]()
 ;
;
(6.46)
 ;
;
 ;
;
 .
.
Построим по системе (6.46)
статические характеристики для двух скоростей ![]() и
и ![]() . Результаты расчета представлены
в виде графиков (рис. 6.11, 6.12).
. Результаты расчета представлены
в виде графиков (рис. 6.11, 6.12).
6.5 Проверка электродвигателя по нагреву при работе на нижней скорости
Известно, что у само вентилируемых двигателей ухудшаются условия охлаждения при снижении частоты вращения. Поэтому необходимо проверить, соблюдаются ли условия по нагреву при работе на нижней скорости диапазона регулирования. Расчет допустимого момента по условиям нагрева будем
производить по методике, изложенной в [8].
Известно, что лимитирующей по нагреву частью асинхронного короткозамкнутого двигателя в установившемся режиме является изоляция обмотки статора. Среднее установившееся превышение температуры обмотки статора может быть определено по методу эквивалентных потерь, согласно которому уравнение теплового баланса записывается следующим образом:
![]() , (6.47)
, (6.47)
где: τ∞ – установившееся превышение температуры статора;
![]() – теплоотдача, зависящая от
угловой скорости;
– теплоотдача, зависящая от
угловой скорости;
![]() – коэффициенты внешнего
подогрева, учитывающие долю внешних потерь, участвующих в нагревании обмотки
статора, в общем случае зависящие от скорости.
– коэффициенты внешнего
подогрева, учитывающие долю внешних потерь, участвующих в нагревании обмотки
статора, в общем случае зависящие от скорости.
![]() ,
(6.48)
,
(6.48)
![]() , (6.49)
, (6.49)
![]() ,
,
![]() .
.
Распишем выражения для ΔPM1, ΔPM2, ΔPcm:
 (6.50)
(6.50)
![]() ; (6.51)
; (6.51)
![]() , (6.52)
, (6.52)
где: ΔPсmвн – номинальные потери в стали на вихревые токи;
φ – относительное значение потока;
ΔPсmгн – номинальные потери в стали на гистерезис.
Перепишем (6.42) в виде:
![]() . (6.53)
. (6.53)
Для номинального режима уравнение (6.53) примет вид:
![]() ,
,
или
![]() , (6.54)
, (6.54)
где: hτ – доля эквивалентных греющих потерь при номинальном режиме.
Поделив почленно (6.53) на (6.54), получим уравнение теплового баланса при частотном управлении в относительных единицах:
 (6.55)
(6.55)
Примем допущение [8]:
![]() , (6.56)
, (6.56)
где: μ – относительное значение момента.
Подставим (6.56) в (6.55) и выразим μ:
 . (6.57)
. (6.57)
Определим значения постоянных коэффициентов:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Примем из [8] ![]() , тогда:
, тогда:
![]() ,
,
![]() .
.
Выразим из (6.21) формулу для определения относительного тока намагничивания im:
 . (6.58)
. (6.58)
Т.к. электропривод работает в установившемся режиме с нагрузками меньше номинальной, то примем φ=im.
Запишем выражение для ![]() – коэффициент изменения
теплоотдачи:
– коэффициент изменения
теплоотдачи:
![]() ,
,
где: λ0 – коэффициент теплоотдачи для неподвижного двигателя. Примем λ0=0.4 из [8]. Запишем систему уравнений для определения μ:
![]()

![]()
(6.59)
![]() ;
;
![]() ;
;
 ;
;
По системе уравнений (8.37) построим зависимость допустимого по
нагреву момента от частоты питающего
напряжения, приняв ![]() . Результаты расчета представлены
в виде графика на рис. 6.13.
Определим, какой допустимый момент можно иметь с АД на нижней скорости
диапазона регулирования.
. Результаты расчета представлены
в виде графика на рис. 6.13.
Определим, какой допустимый момент можно иметь с АД на нижней скорости
диапазона регулирования. ![]() . Из рис. 6.13 видно, что μ(
. Из рис. 6.13 видно, что μ(![]() )≈0.7.
)≈0.7.
![]() .
.
Следовательно, данный двигатель удовлетворяет условиям нагрева, т. к. Мдоп>Мсm=5.1H·м
7. АНАЛИЗ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ
7.1 Моделирование динамики технологической установки
Упрощенная структурная схема
электропривода представлена на рис. 7.1. Полная структурная схема представлена
в графической части (лист 4). Схема управления электроприводом обеспечивает
автоматическое регулирование скорости вращения электродвигателя и коррекцию
скорости вращения по температуре во второй зоне пекарной камеры. Сигнал задания
температуры и задания скорости задаются задатчиками температуры (ЗТм) и
скорости (ЗС). Датчик температуры (ДТм) измеряет температуру (Тм) во второй
зоне пекарной камеры и преобразует ее в в сигнал обратной связи по температуре
с коэффициентом kотм. Регулятор температуры (РТм)
формирует закон коррекции по разности сигналов задания и обратной связи.
Устройство ограничения У01 ограничивает сигнал с выхода регулятора температуры
на заданном уровне. На вход задатчика интенсивности поступает сумма сигналов
задания скорости Uзс и коррекции температуры Uктм. Задатчик интенсивности формирует
сигнал задания скорости ![]() , контролируя интенсивность его
нарастания Применение ЗИ необходимо для обеспечения плавного пуска
электропривода с контролируемым ускорением. Система управления преобразователя
частоты формирует сигналы задания амплитуды напряжения UзU и угловой скорости Uω. Устройство ограничения У01 ограничивает сигнал с выхода
регулятора тока (РТ) на уровне допустимого. Сигнал необходимо ограничивать
из-за условия ограничения электродвигателя по напряжению. Силовая схема
преобразователя частоты (УН, УЧ) представлена безынерционными звеньями (kU, kω), т.к. система управления
реализуется на микропроцессорном контроллере с высоким быстродействием, а
силовые ключи коммутируют с высокой частотой (5 кГц). Структурная схема
асинхронного электродвигателя (графическая часть: лист 4) описывается системой
дифференциальных уравнений в операторной форме (6.29). Произведем расчет
постоянных времени электродвигателя по уравнениям (6.28):
, контролируя интенсивность его
нарастания Применение ЗИ необходимо для обеспечения плавного пуска
электропривода с контролируемым ускорением. Система управления преобразователя
частоты формирует сигналы задания амплитуды напряжения UзU и угловой скорости Uω. Устройство ограничения У01 ограничивает сигнал с выхода
регулятора тока (РТ) на уровне допустимого. Сигнал необходимо ограничивать
из-за условия ограничения электродвигателя по напряжению. Силовая схема
преобразователя частоты (УН, УЧ) представлена безынерционными звеньями (kU, kω), т.к. система управления
реализуется на микропроцессорном контроллере с высоким быстродействием, а
силовые ключи коммутируют с высокой частотой (5 кГц). Структурная схема
асинхронного электродвигателя (графическая часть: лист 4) описывается системой
дифференциальных уравнений в операторной форме (6.29). Произведем расчет
постоянных времени электродвигателя по уравнениям (6.28):
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Колебания температуры в зонах пекарной камеры возникает при начальной загрузке печи, когда происходит интенсивное поглощение тепла тестовыми заготовками. Т.к. процессы теплообмена высокоинерционные, то быстро компенсировать изменение температуры невозможно из-за ограниченной величины напряжения, прикладываемого к электронагревателям. Но с другой стороны, для создания оптимального режима выпечки компенсирование изменения температуры можно произвести изменением продолжительности времени выпечки, т.к. этот контур регулирования обладает высоким быстродействием. Также возмущающим воздействием для температуры в пекарной камере является изменение состава тестовых заготовок.
Допустим, что колебания температуры носят периодический характер. Тогда эти колебания можно разложить в ряд Фурье и выделить постоянную составляющую. Коэффициент обратной связи по температуре kотм следует подбирать таким образом, чтобы сигнал задания температуры был равен сигналу, пропорциональному постоянной составляющей температуры. Тогда сигнал рассогласования будет пропорционален изменению гармонических составляющих температуры.
Коэффициент усиления регулятора температуры настраивается так, что при изменении температуры на 10˚ скорость вращения изменялась на 10% номинальной скорости электродвигателя (14.6 с-1), что соответствует напряжению задания скорости ≈1В.
Допустим, выпекается хлеб «Злаковый». Температура во второй зоне пекарной камеры (табл. 1.2) изменяется в пределах 260…280 ˚С. Усредним значение изменения температуры (270 ˚С) и будем считать, что эта температура соответствует постоянной составляющей. Амплитуду первой гармоники примем 10 ˚С. Тогда при сигнале задания температуры 10В (соответствует 270˚С) коэффициент обратной связи по температуре будет:
![]() .
.
Сигнал рассогласования между заданием и обратной связью
![]() .
.
Тогда коэффициент усиления РТм:
![]() .
.
Т.к. при увеличении температуры скорость вращения двигателя должна увеличиваться, а при уменьшении – уменьшаться, то выход РТ должен быть инверсным. Принимаем kТ=-2.7.
Моделирование переходных процессов в электроприводе будем производить при помощи математического программного пакета MATLAB и его приложения SIMULINK, позволяющего реализовать структурную схему. Моделирование будем производить для трех режимов:
1. Разгон до максимальной скорости, работа на максимальной скорости и торможение до нуля.
2. Разгон до минимальной скорости, работа на минимальной скорости и торможение до нуля.
3. Разгон до максимальной скорости и коррекция скорости по температуре.
При рассмотрении первых двух режимов необходимо выявить особенности частотного регулирования, способа управления и особенности системы стабилизации момента с обратной связью по току статора. Поэтому выход регулятора температуры для этих режимов обнулен, т.е. коррекция не действует.
При рассмотрении третьего режима необходимо убедиться в работоспособности устройства коррекции температуры.
Рассмотрим первый режим работы. Результаты моделирования представлены в виде графиков (рис. 7.2-7.17). Как видно из рисунка 7.5, в начальный промежуток времени скорость не изменяется и равна нулю. Обычно такой промежуток времени называют запаздывание. Такой вид кривой скорости объясняется несколькими причинами:
1. Нагрузка электропривода реактивная и носит знакопеременный характер, что ухудшает условия пуска.
2. Наличие момента трогания.
3. Некачественная кривая вращающегося момента (рис. 7.4). Наличие колебательности и медленности нарастания момента.
Некачественность кривой момента можно объяснить следующими причинами. Элекромагнитный момент является функцией тока ротора, магнитного потока и скольжения:
М=Ф*I2*cosφ2.
Т.к. все токи и потоки асинхронного электродвигателя взаимосвязаны, то изменение одних приводит к изменению других, и наоборот. В начальный момент времени магнитный поток стремиться достичь своего номинального значения. Из-за взаимосвязи потока с токами статора и ротора это процесс носит колебательный характер, что в свою очередь вызывает колебания токов статора и ротора (рис. 7.6), что в конечном итоге вызывает колебание момента. Если какими-то либо причинами удалось бы создать начальный магнитный поток на уровне номинального, то кривая момента при пуске имела бы прямоугольный вид. Это предположение косвенно подтверждается на рис. 7.4, где динамический момент при торможении постоянный. Таким образом, напрашивается вывод: чтобы получить хорошие переходные процессы (прямоугольный вид динамического момента, линейную скорость и т.д.), необходимо регулировать магнитный поток и ток статора независимо друг от друга.
Рассмотрим второй режим. Из рис.7.19 – 7.24 видно, что переходные процессы в электроприводе схожи для двух режимов. Разница состоит в том, что во втором случае увеличилась колебательность. На мой взгляд, это объясняется тем, что увеличилось соотношение U/f, т.к. на верхней скорости выход регулятора момента был ограничен предельным значением.
Анализируя работу электропривода в первых двух режимах, можно сделать выводы:
1. Ускорение при пуске не выходит за границы допустимого значения [адоп]=0.4м/с2.
2. Электропривод работает устойчиво во всем диапазоне регулирования.
3. Пусковой момент не превышает 180% от номинального, что соответствует режиму работы ПЧ VLT5000.
4. Тормозной момент не превышает 160% от номинального, что соответствует мощности тормозного резистора.
Рассматривая третий режим работы (рис. 7.25 –7.26), можно сделать вывод что скорость движения конвейера изменяется по корректирующему сигналу почти мгновенно. Можно сказать, что запаздывание отсутствует.
7.2 Определение показателей переходных процессов
К основным показателям относятся время регулирования, колебательность, перерегулирование.
Показатели качества переходных процессов определим для режимов работы 1 и 2 для кривой скорости.
Для режима работы 1 (рис 7.5):
Время регулирования: tр=1 с.
Перерегулирование и колебательность отсутствуют.
Определим показатели качества переходных процессов для режима работы 2 (рис. 7.19):
Время регулирования: tр=0.55 с.
Перерегулирование:
 .
.
Колебательность: δ=4.
Таким образом, можно сделать вывод, что система электропривода имеет приемлемые показатели качества переходных процессов.
8. ВЫБОР И ПРОЕКТИРОВАНИЕ СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
8.1 Формализация условий работы установки
При автоматизации печей объектом управления является собственно пекарная камера, в которой происходят преобразования заготовок теста в готовое изделие. Задача автоматического управления пекарной камерой заключается в том, чтобы, учитывая свойства исходного продукта—теста и особенности механизма процесса выпечки, устанавливать такие параметры среды и условия тепло- и влагообмена в пекарной камере, при которых процесс выпечки будет протекать наиболее экономично, а готовый продукт будет иметь высокое качество и соответствовать требованиям ГОСТа [19].
Согласно теории тепло- и массообмена, главным физическим фактором, определяющим процесс выпечки, является процесс переноса теплоты и влаги в тестовой заготовке, который, как указывает А. С. Гинзбург, происходит в два периода.
В первый период выпечки влага в основном в виде жидкости, перемещается от поверхностных слоев к центральным. В этот период за счет перемещения влаги внутрь образуется корка изделия. Наряду с этим в первом периоде протекают физико-химические процессы, в результате которых влага в тесте-мякише связывается клейстеризующимся крахмалом.
Во втором периоде выпечки происходит дальнейшее формирование корки выпекаемого изделия за счет интенсивного испарения влаги при углублении поверхности испарения. В этот период влажность мякиша изделия почти не изменяется, а испарение происходит главным образом на поверхности испарения, являющейся границей корки и мякиша.
В соответствии с представлениями о различных периодах выпечки в пекарной камере различают следующие зоны увлажнения: первого периода выпечки, второго периода выпечки.
В зоне увлажнения должны быть созданы условия для обеспечения интенсивного влагообмена между окружающей средой н поверхностью изделия, в результате которого происходит поглощение пара массой теста и конденсация его на поверхности тестовой заготовки. Поэтому основным условием, которое должно быть создано в зоне увлажнения, является высокое насыщение среды паром при минимальной вентиляции камеры и пониженной интенсивности теплообмена, чтобы достичь здесь относительной влажности порядка 70—80%. Чем ниже интенсивность теплообмена в зоне увлажнения, тем медленнее температура поверхности изделия достигает значения точки росы и тем длительнее период конденсации. Это позволяет снизить насыщение среды паром при сохранении хорошего качества изделий.
После зоны увлажнения интенсивность теплообмена в пекарной камере резко повышается с целью передачи изделию требуемого количества теплоты. На увлажненной поверхности изделия происходит клейстеризация крахмала при избытке влаги, в результате чего образуется слой крахмального клейстера, закрывающий поры и подготавливающий поверхность изделия для последующей тепловой обработки. Повышение температуры этого слоя обеспечивает оформление корки, что является одним из основных качественных требований, определяющих внешний вид изделия.
В первый период выпечки важно передать изделию большее количество теплоты также и для образования необходимой структуры изделия. В этот период происходит значительный подъем изделия, обусловленный расширением нагревающихся газов в массе теста и зависящий от интенсивности прогрева изделия. При интенсивном прогреве поверхностных слоев в выпекаемом изделии создается значительный температурный градиент, обусловливающий соответствующее повышение эффекта термовлагопроводности и увеличение количества влаги, перемещающейся внутрь изделия, благодаря чему уменьшается упек.
Во второй период выпечки происходит интенсивное углубление зоны испарения и дальнейшее образование корки за счет влагоотдачи в окружающую среду. При углублении зоны испарения прогрев внутренней части изделия обусловливается температуропроводностью мякиша и температурным градиентом, величина которого определяется постоянной температурой поверхности испарения и снижением температурного поля по направлению к центру. В этот период интенсивность теплообмена резко снижается, так как менее интенсивный теплообмен мало влияет на прогрев изделия, но зато снижает потери теплоты от упека, которые достигают общего расхода теплоты на выпечку. Снижение интенсивности теплообмена во второй период выпечки достигается сведением до минимума излучения на открытую поверхность изделия или полным его исключением с одновременным уменьшением температуры среды пекарной камеры.
Таким образом, качество выпекаемой продукции и расход тепла на выпечку определяется временем ее пребывания в каждой зоне и режимными параметрами внутри пекарной камеры.
Рассмотрим порядок включения и выключения всех механизмов печи. После подключения механизмов печи к питающей сети необходимо выставить требуемое задание температур по зонам пекарной камеры и включить электронагреватели. При достижении температур в зонах пекарной камеры до заданных следует включить конвейер пода печи и установить необходимое время выпечки, обеспечить подачу пара в зону пароувлажнения. Температуры в зонах пекарной камеры и продолжительность выпечки выставляется в соответствии с технологическими требованиями на изделие. После этих процедур можно загружать конвейер тестовыми заготовками, для транспортирования их в пекарную камеру. Удаление паро-воздушной среды из пекарной камеры может осуществляться принудительно при помощи вентилятора или за счет естественной тяги. При выходе из пекарной камеры первых выпеченных изделий необходимо включить механизм опрыскивания
готовой продукции и механизм очистки ленты. После последних
действий все механизмы печи включены и в таком состоянии печь работает длительное время (несколько часов, смена и т.д.).
Отключение механизмов печи осуществляется в следующей последовательности. Сначала отключаются электронагреватели, а при снижении температуры следует отключить все оставшиеся механизмы печи.
При работе установки могут возникнуть аварийные режимы: неисправность привода конвейера, неисправность электронагревателей. Такие аварийные режимы могут возникать при механических повреждениях кинематической цепи и при срабатывании защит. При неисправности привода конвейера необходимо сразу же отключить электронагреватели, чтобы избежать сгорания выпекаемой продукции, а также отключить все механизмы печи. При неисправности электронагревателей необходимо сразу же прекратить загрузку тестовых заготовок. При возникновении какой-либо другой неисправности нужно отключить печь, устранить неисправность и включить печь по алгоритму, описанному выше.
8.2 Разработка алгоритма управления
Составим алгоритм управления хлебопекарной печью (рис. 8.1).
В блоках 1, 2, 3 производится подача напряжения на пуско-регулирующую аппаратуру механизмов печи и электронагреватели (F1=1, F2=1, F3=1, F4=1, F5=1), задание температурного режима по зонам печи (Т=Т1) и включение электронагревателей (SB21=1).
В блоке 5 происходит выдержка времени нагрева печи до заданной температуры Т1.
В блоках 6, 7 происходит включение привода конвейера (SB17=1), заданного времени выпечки (t=t1) и включение вентилятора (SB18=1).
В блоке 8 происходит выдержка времени до появления первых выпекаемых изделий (И=1).
В блоках 9 происходит включение механизма опрыскивания готовой продукции (SB19=1) и механизма очистки ленты (SB20=1).
В блоке 10 происходит выпечка хлебобулочных изделий до конца рабочего дня (смены и т.д.).
Блоки 10, 12, 13, 14 описывают
отключение механизмов печи: очистки ленты (![]() ), опрыскивания готовой продукции (
), опрыскивания готовой продукции (![]() ), вентилятора (
), вентилятора (![]() ), конвейера (
), конвейера (![]() ) и электронагревателей (
) и электронагревателей (![]() ).
).
8.3 Разработка функциональной и логической схемы
8.3.1 Разработка функциональной схемы
Функциональная схема автоматизации хлебопекарной печи А2 – ХПА – 25 представлена в графической части проекта (лист 7). На схеме приняты обозначения технологического оборудования:
1 – ленточный конвейер;
2 – щетка очистки ленты;
3, 4, 5, 6 – электронагреватели температурных зон печи;
7 – вентилятор;
8 – механизм опрыскивания готовой продукции.
Схемой предусмотрены четыре контура контроля и регулирования температуры по зонам пекарной камеры, а также коррекция времени выпечки по температуре во второй зоне. Стабилизация давления пара, подаваемого в зону увлажнения, осуществляется регулятором прямого действия. В качестве измерительных приборов температуры применены термометры сопротивления (ТЕ). Устройством, формирующим законы регулирования температуры, является программируемый контроллер (ПК). В ПК сводятся сигналы задания температуры (ТН) и сигналы обратных связей (ТЕ). Выходы регуляторов температуры подключены к управляющим тиристорных регуляторов напряжения (NC), которые изменяют выходное напряжение в пределах 0…380В. При изменении напряжения, прикладываемого к электронагревателям, изменяется количество выделяемого тепла и следовательно температуры в пекарной камере.
Контур регулирования температуры в нулевой зоне пекарной камеры построен следующим образом: термометр сопротивления (1-1), температурный модуль ПК (1-2), модуль ПИД регулирования ПК (1-4), регулятор напряжения (1-5) и электронагревателей 0-ой зоны (3).
Задание температуры происходит с потенциометра (1-6), расположенного на пульте управления. Контроль температуры осуществляется с помощью аналого-цифрового преобразователя (1-3), расположенного на пульте управления и соединенными с аналоговым выходным модулем ПК. Температурный модуль ПК (1-2) производит преобразование значения сопротивления терморезистора в унифицированный сигнал 0…10 В, прропорциональный температуре.
Аналогичным образом построены контура регулирования температуры 1-ой, 2-ой и 3-ей температурных зон пекарной камеры.
Как говорилось выше, в схеме автоматизации предусмотрена коррекция скорости движения конвейера печи по температуре во второй зоне пекарной камеры.
Подолжительность выпечки задается с потенциометра (3-9), расположенного на пульте управления. Закон коррекции реализуется на ПК с помощью стандартного ПИД регулятора (3-7), реализующего пропорциональный закон регулирования (постоянная времени дифференцирования принята равной нулю, а постоянная времени интегрирования – бесконечности). На суммирующий вход преобразователя частоты (3-8) заведены сигнал задания продолжительности выпечки и сигнал с выхода регулятора температуры (3-7). Таким образом, скорость движения конвейера пропорциональна сигналу задания и температуре во 2-ой зоне пекарной камеры.
Заданный алгоритм включения и выключения электроприемников осуществляет логическая схема NY, реализованная с помощью программируемого контроллера. Схема также обеспечивает сигнализацию о включении (выключении) электроприемников (НА), аварийную звуковую сигнализацию (А) и местное освещение в пекарной камере. Сигналы о включении (выключении) электроприемников поступают на входы ПК с кнопок управления (НА), расположенных на пульте управления. Эти сигналы обрабатываются по программе, заложенной в ПК, и преобразуются в выходные сигналы, поступающие на магнитные пускатели (NS), регуляторы напряжения (NC) и преобразователь частоты (NC). Логическая схема устройства управления будет составлена позже.
8.3.2 Разработка логической схемы
Логическая схема автоматизации должна обеспечит заданный алгоритм включения и выключения электроприемников. Логическая схема имеет входные, выходные и промежуточные сигналы., поступающие из пульта управления, а также кнопок управления, расположенных в начале и конце пекарной камеры.
Т. к. входные сигналы поступают от кнопок, то назовем эти сигналы также, как и соответствующие кнопки.
К входным сигналам относятся:
SB16 – «ПУСК».При поступлении этого сигнала должна собираться схема управления;
![]() – «СТОП». При поступлении этого сигнала в логическую
схему должны отключиться электронагреватели и все механизмы печи;
– «СТОП». При поступлении этого сигнала в логическую
схему должны отключиться электронагреватели и все механизмы печи;
![]() – «КОНВЕЙЕР ВЫКЛ.». При поступлении этих сигналов в
схему управления отключается привод конвейера;
– «КОНВЕЙЕР ВЫКЛ.». При поступлении этих сигналов в
схему управления отключается привод конвейера;
SB17 – «КОНВЕЙЕР ВКЛ». Сигнал включает привод конвейера;
SB18 – «ВЕНТИЛЯТОР ВКЛ.». При поступлении сигнала в схему управления включается вентилятор отсоса паро-воздушной среды из зоны пароувлажнения;
![]() – «ВЕНТИЛЯТОР ВЫКЛ.». Сигнал выключает вентилятор;
– «ВЕНТИЛЯТОР ВЫКЛ.». Сигнал выключает вентилятор;
QF1 – Сигнал, снимаемый с автоматического выключателя QF1, подключающего электродвигатель вентилятора к сети;
SB19 – «ЩЁТКА ВКЛ.» При подаче этого сигнала в схема управления включается механизм очистки ленты;
![]() – «ЩЁТКА ВЫКЛ.»;
– «ЩЁТКА ВЫКЛ.»;
QF2 – Сигнал, снимаемый с автоматического выключателя QF2, подключающего электродвигатель механизма очистки ленты к сети;
SB20 – «ОПРЫСКИВАНИЕ ВКЛ.». При подаче этого сигнала в схему управления включается механизм опрыскивания готовой продукции;
![]() – «ОПРЫСКИВАНИЕ ВЫКЛ.»;
– «ОПРЫСКИВАНИЕ ВЫКЛ.»;
QF3 – Сигнал, снимаемый с автоматического выключателя QF3, подключающего электродвигатель механизма очистки готовой продукции к сети;
SB3, SB4 – «ОСВЕЩЕНИЕ». Сигналы включают местное освещение внутри пекарной камеры;
SB1 – «НАГРЕВАТЕЛИ ВКЛ.» При поступлении этого сигнала в схему управления включаются электронагреватели;
![]() – «НАГРЕВАТЕЛИ ВЫКЛ.»;
– «НАГРЕВАТЕЛИ ВЫКЛ.»;
![]() – «СИГНАЛИЗАЦИЯ ВЫКЛ.». При поступлении этого сигнала
в схему управления снимается сигнал звуковой сигнализации;
– «СИГНАЛИЗАЦИЯ ВЫКЛ.». При поступлении этого сигнала
в схему управления снимается сигнал звуковой сигнализации;
Выходные сигналы:
КМ1 – Управление приводом ленточного конвейера и сигнализации о включении/выключении;
КМ2 – Управление приводом вентилятора и сигнализации о включении/выключении;
КМ3 – Управление приводом механизма очистки ленты и сигнализации о включении/выключении;
КМ4 – Управление приводом механизма опрыскивания готовой продукции и сигнализации о включении/выключении;
КМ5 – Управление электронагревателями и сигнализации о включении/выключении;
НА – Включение/выключение звуковой сигнализации;
EL1, EL2 – Управление местным освещением в пекарной камере;
НL1 …HL6 – Сигнализация о работе механизмов печи и электронагревателей.
Промежуточные сигналы:
![]() – Сигнал аварийного останова и
сигнализация об останове;
– Сигнал аварийного останова и
сигнализация об останове;
КМ6 – Подготовка и съем звуковой сигнализации;
По алгоритму работы печи составим логические функции для промежуточных и выходных сигналов:
![]()
HL1=K1;
![]()
HL2=KM1;
![]() (8.1)
(8.1)
HL3=KM2;
![]()
HL4=KM3;
![]()
HL5=KM4;
![]()
HL6=KM5;
![]()
![]()
8.4 Выбор аппаратов
8.4.1 Выбор программируемого контроллера и составление программы
По функциональной схеме и логическим функциям определим количество требуемых входов и выходов для ПК (табл. 8.1):
Таблица 8.1.
| Дискретные входы 24В | 16 |
| Дискретные выходы 24В | 11 |
| Аналоговые входы 0 – 10В | 4 |
| Аналоговые входы Pt100 | 4 |
| Аналоговые выходы 0 – 10В | 9 |
Выбираем для реализации схемы автоматизации программируемый контроллер фирмы SIEMENS типа SIMATIC S5.
Для входных сигналов выбираем из [20] дискретный входной модуль 6ES5 430 – 7LA11 на 32 цифровых входа 24 В постоянного тока. Технические данные этого модуля приведены в таблице 8.2:
Таблица 8.2
| Количество входов | 32 |
|
Уровни входных сигналов: логическая единица, В логический ноль, В |
13…30 -30…5 |
| Входной ток, мА | 8.5 |
| Потребляемая мощность, Вт | 6.5 |
|
Время переключения, мс: Из «0» в «1» Из «0» в «1» |
1.4…5 1.4…5 |
Для дискретных выходных сигналов выбираем из [20] дискретный выходной модуль (6ES5 454 – 7LA11) на 16 цифровых выходов 24 В постоянного тока. Технические данные этого модуля приведены в таблице 8.3:
Таблица 8.3.
| Количество выходов | 16 |
| Напряжение нагрузки L1, В | 24 |
| Выходной ток для сигнала «1», А | 2 |
| Мощность индуктивной нагрузки, Вт | 10 |
|
Частота переключения, Гц: При индуктивной нагрузке При омической нагрузке |
Max 0.27 Max 100 |
| Потребляемая мощность, Вт | 20 |
Для аналоговых входных сигналов выбираем из [20] аналоговый входной модуль 6ES5 465 – 7LA11, к которому можно подключать как измеритель температуры, так и унифицированные аналоговые сигналы 0 … 10 В. Технические данные модуля приведены в таблице 8.4.
Таблица 8.4.
| Диапазон входных значений | Pt100, 0/-20мА, ±5В, ±10В |
| Количество входов | 16 |
| Способ подключения |
Двухпроводное для Pt100 четырехпроводное |
| Представление измеренного значения | 12 бит+знак |
| Принцип измерения | Интегрирующий |
| Принцип преобразования | напряжение→время |
| Время интегрирования | 20 мс при 50 Гц |
|
Время сканирования для - 8 входных значений - 16 входных значений |
0.48 с при 50 Гц 0.96 с при 50 Гц |
Для аналоговых выходных сигналов выберем два аналоговых модуля 6ES5 470 – 7LВ11 на 8 выходов +/- 10 В с потенциальной развязкой. Технические данные модуля приведены в таблице:
Таблица 8.5.
| Количество выходов | 8 |
| Диапазон выходных значений | ±10В, 0…20 мА |
| Цифровое представление аналогового значения | 11 бит + знак |
| Время преобразования, мс | 1 |
| Линейность преобразования в номинальном диапазоне | +/- 2.5%, ±3 точки |
| Потребляемая мощность, Вт | 8.5 |
Схемы подключения управляющих сигналов к модулям контроллера представлены в графической части дипломного проекта (лист 7). Каждому входу и выходу в модулях ПК соответствует свой адрес. Адреса входов и выходов приведены в таблице 8.6:
Таблица 8.6.
| Цифровые сигналы | Аналоговые сигналы | ||||||
| Вход-ные | Адреса | Выход-ные | Адреса | Вход-ные | Адреса | Выход-ные | Адреса |
|
|
E 1.0 | HL1 | A 1.0 | TE (1-1) | E 4 | NC(1-5) | A 3 |
| SB16 | E 1.1 | KM1 | A 1.1 | TE (2-1) | E 5 | NC(2-5) | A4 |
|
|
E 1.2 | HL2 | A 1.2 | TE (3-1) | E 6 | NC(3-5) | A 5 |
|
|
E 1.3 | KM2 | A 1.3 | TE (4-1) | E 7 | NC(3-8) | A 6 |
|
|
E 1.4 | HL3 | A 1.4 | TH (1-6) | E 8 | NC(4-5) | A 7 |
|
|
E 1.5 | KM3 | A 1.5 | TH (2-6) | E 9 | TI(1-3) | A 8 |
|
|
E 1.6 | HL4 | A 1.6 | TH (3-6) | E 10 | TI(2-3) | A 9 |
|
|
E 1.7 | KM4 | A 1.7 | TH (4-6) | E 11 | TI(3-3) | A 10 |
|
|
E 2.0 | HL5 | A 2.0 | TI(4-3) | A 11 | ||
| QF2 | E 2.1 | KM5 | A 2.1 | ||||
|
|
E 2.2 | HL6 | A 2.2 | ||||
| SB19 | E 2.3 | HA | A 2.3 | ||||
| QF3 | E 2.4 | ||||||
|
|
E 2.5 | ||||||
| SB20 | E 2.6 | ||||||
|
|
E 2.7 | ||||||
| SB21 | E 3.0 | ||||||
|
|
E 3.1 | ||||||
Запрограммируем логические уравнения (8.1) на языке программирования STEP 5. Составим программу для уравнений:
![]() ,
,
HL1=K1,
|
UNC 0 0 ) = = |
E E M M M |
1.0 1.1 1.1 1.0 1.0 |
Для уравнений: ![]() ,
,
HL2=KM1,
|
U UN UN UN ( 0 0 ) = = = |
M E E E E M M A A |
1.1 1.2 1.3 1.4 1.5 1.2 1.1 1.1 1.2 |
Для уравнений: ![]() ,
,
HL3=KM2,
|
U U N U ( 0 0 ) = = = |
M E E E M M A A |
1.1 1.7 1.6 2.0 1.2 1.2 1.3 1.4 |
Для уравнений: ![]()
HL4=KM3,
|
U UN U ( 0 0 ) = = = |
E E M E M M A A |
2.1 2.2 1.0 2.3 1.4 1.4 1.5 1.6 |
Для уравнений: ![]()
HL5=KM4,
|
U U N U ( 0 0 ) = = = |
M E E E M M A A |
1.0 2.5 2.4 2.6 1.5 1.5 1.7 2.0 |
Для уравнений: ![]()
HL6=KM5,
|
U UN U ( 0 0 ) = = = |
M E M E M M A A |
1.0 2.7 1.1 3.0 1.6 1.6 2.1 2.2 |
Для уравнений: ![]()
![]()
|
UN U ( 0 0 ) = U |
E M M M M M M M A |
3.1 1.0 1.6 1.7 1.7 1.0 1.1 1.7 2.3 |
Составим программу для блоков ПИД регуляторов.
Для первого блока:
|
OB 13: FB 7: |
SPA BE A L T L SPA L T |
FB DB PW DW EW OB DW PW |
7 3 100 22 10 251 40 100 |
Для второго блока:
|
OB 13: FB 7: |
SPA BE A L T L SPA L T |
FB DB PW DW EW OB DW PW |
7 5 100 22 10 251 60 100 |
Для третьего блока:
|
OB 13: FB 7: |
SPA BE A L T L SPA L T |
FB DB PW DW EW OB DW PW |
7 4 100 22 10 251 50 100 |
Для четвертого блока:
|
OB 13: FB 7: |
SPA BE A L T L SPA L T |
FB DB PW DW EW OB DW PW |
7 6 100 22 10 251 70 100 |
Для пятого блока:
|
OB 13: FB 7: |
SPA BE A L T L SPA L T |
FB DB PW DW EW OB DW PW |
7 7 100 22 10 251 50 100 |
8.4.2 Выбор аппаратов
Выберем контакторы (КМ2, КМ3, КМ4) для управления электродвигателями механизмов печи. Выбор производится по току, протекающему через контакты пускателя, и напряжению, прикладываемому к катушке магнитного пускателя.
Номинальный ток двигателей вентилятора (4А30В4) и механизма очистки сетки (4А100L6):
![]()
Максимальный ток, протекающий через пускатели:
Imax=λI*Iн=7*4.9=14.5А.
Выбираем из [15] КПВ600 на ток 25 А и напряжение 24 В постоянного тока (КМ2, КМ3).
Номинальный ток электродвигателя механизма опрыскивания готовой продукции:
![]()
Максимальный ток, протекающий через контакты электромагнитного пускателя КМ4:
Imax=7*0.9=6.3 А.
Выбираем из [15] электромагнитный пускатель типа КПВ600 на ток 10 А и напряжение 24 В постоянного тока.
Выбираем из [15] реле КМ1 и КМ4, для управления включением и выключением преобразователя частоты и электронагревателей по напряжению.
Выбираем реле КМ1 и КМ4 типа РПУ – 0 24 В – 2.5 А.
Кнопки управления SB10 … SB21 выбираем типа КЕ202 – 2 на напряжение 24 В постоянного тока.
Кнопки управления SB1, SB2, SB8 выбираем типа КЕ181 – 4.
Сигнальные лампы HL1—HL6 выбираем типа ДЛ02.
Аналого-цифровые преобразователи (TI) выбираем типа MPS430.
Регулировочные резисторы (HT) выбираем из [17] типа СП4 – 2Ма 4.7 МОм – 0.5 Вт ±10%.
9. КОНСТРУКТИВНАЯ РАЗРАБОТКА ПУЛЬТА УПРАВЛЕНИЯ
Пульт управления предназначен для дистанционного управления электроустановкой. Он располагается в районе последнего ограждения в конце печи. Такое расположение пульта управления обусловлено тем, что оператор может корректировать продолжительность выпечки, глядя на выпекаемое изделие. На пульте управления располагаются кнопки управления, устройства отображения информации и задающее устройство. При проектировании пульта управления необходимо соблюсти требования:
1. Пульт управления должен иметь минимальные размеры и минимальный объем;
2. Пульт управления должен быть удобен в эксплуатации. Приборы, установленные на нем, должны быть собраны в функциональные группы и скомпонованы вместе (кнопки включения и выключения электроприемников должны находиться вместе, устройства контроля и задания параметров технологического процесса должны находиться рядом и т.д.);
3. На панели пульта рядом с приборами должны быть сопровождающие подписи, поясняющие назначения приборов. Надписи должны быть краткими и содержательными;
4. Кнопки включения и выключения должны иметь разную цветовую окраску (обычно кнопки включения – белые, а выключения – красные);
5. Кнопка аварийного останова должна иметь вид, отличный от остальных кнопок (большие размероы), и выделяющий ее среди всех кнопок;
Разработаем пульт управления согласно требованиям, изложенным выше. Внешний вид пульта управления представлен в графической части проекта (лист 2). На пульте управления расположены устройства отображения информации, управляющие и задающие устройства. К устройствам отображения информации относятся аналого-цифровые преобразователи (1, 3, 5, 7, 9), с помощью которых производится контроль времени выпечки и температур в зонах пекарной камеры.
К задающим устройствам относятся потенциометры (2, 4, 6, 8, 10), с помощью которых снимаются сигналы задания продолжительности выпечки и температур в зонах пекарной камеры. Шкалы потенциометров проградуированы в минутах и градусах Цельсия.
Управление электроприемниками печи производятся кнопками. Включение производится кнопками 12, 14, 16, 18, 20, 22. Внутри этих кнопок встроены сигнальные лампы, которые оповещают о состоянии электроприемников. Выключение электроприемников производится кнопками 11, 13, 15, 17, 19, 21, 23.
Выбор приборов, расположенных на пульте управления был, произведен в пункте 8.4.1.
10. ПРОЕКТИРОВАНИЕ СХЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ И ЗАЩИТЫ УСТАНОВКИ
10.1 Выбор аппаратов и кабелей
Хлебопекарная печь подключается к сети низкого напряжения 380 В. Согласно [21] при суммарной мощности электропечной нагрузки до 500 кВт печь подключается к сетям напряжением 380 В и питается совместно с другими электроприемниками цеха. Для питания печи могут применяться как магистральные, так и радиальные схемы.
Магистральные схемы применяются при упорядоченном расположении электропечей вдоль цеха и при мощности печей 200 – 400 кВт. В качестве магистрального токопровода используются комплектные токопроводы типов ШМА – 68 и ШМА – 59.
Радиальные схемы находят применение при питании электропечных установок малой и большой мощности, при размещении электропечей, неудобном для магистральных схем.
Электроснабжение вспомогательных механизмов хлебопекарной печи осуществляется совместно с самой печью от одного и того же распределительного устройства. В данном случае подключение электроприемников к питающей цепи происходит при помощи пакетного выключателя F1 (графическая часть: лист 5). При включении выключателей F1, F4 происходит подача напряжения на электронагреватели. Подключение электродвигателей механизмов печи происходит при включении выключателя F3. Подача напряжения на преобразователь частоты происходит при включении выключателя F5. Для выбора вводных выключателей и кабелей рассчитаем номинальные токи электроприемников.
Номинальные токи электродвигателей механизма очистки ленты (4A100L6) и электродвигатели вентилятора (4А100L4):
![]() .
.
Номинальный ток мотор-редуктора (МЦ2С 63-71-КЧ3):
![]() .
.
Номинальный ток нагревателей зоны пароувлажнения:
![]() .
.
![]() Номинальный ток нагревателей I-ой и II-ой температурной зоны:
Номинальный ток нагревателей I-ой и II-ой температурной зоны:
![]() .
.
Номинальный ток нагревателей III-ей температурной зоны:
![]() .
.
Выберем переключатели F1…F5.
Через пакетный выключатель F1 протекает суммарный ток электроприемников:
![]() .
.
Выбираем из [15] пакетный выключатель типа ПВМ – 11 на ток 750 А.
Через пакетный выключатель F2 протекает сумматорный ток нагревателей первой и второй зоны Iнек1,2.
Выбираем из [15] пакетный выключатель типа ПВМ – 10 на номинальный ток 600 А.
Через пакетный выключатель F4 протекает суммарный ток нагревателей нулевой и треьей температурных зон печи.
Iнек0,3 = Iнек0 + Iнек3=78.7 + 78.7 = 157.4 А.
Выбираем из [15] пакетный выключатель типа ПВМ – 8 на номинальный ток 250 А.
Через пакетный выключатель F3 протекает сумматорный ток электродвигателей механизмов печи IΣм:
IΣм=Iнм1+ Iнм2+ Iнм3+ Iнм4=3.5+4.9+4.9+0.9=14.2А.
Выбираем из [15 ] пакетный выключатель типа ПВМ – 2 на номинальный ток 25 А.
Через пакетный выключатель F5 протекает ток электродвигателя печи Iм1.
Выбираем из [15] пакетный выключатель типа ПВМ – 1 на номинальный ток 10 А.
Выберем кабель, соединяющий приемники печи с распределительным устройством. Сечение проводника должно быть проверено по экономической плотности тока:
![]() ,
,
где: S – сечение проводника;
Iн – номинальный ток нагрузки.
Jэк – нормативное значение экономической плотности тока.
Для кабелей с резиновой изоляцией и медными жилами примем Jэк=3.5А/мм2 [22].
Определим сечение кабеля:
![]() .
.
Выбираем из [22] кабель типа ПРГН с сечением проводника 190 мм2.
10.2 Проектирование защит
Все силовые электроприемники должны иметь защиту от перегрузок и короткого замыкания. Защиту от перегрузок электрической части электропривода конвейера печи осуществляет электронная защита преобразователя частоты. Защита от короткого замыкания выполнена с помощью плавких предохранителей FU1…FU3 (графическая часть: лист 5).
Предохранитель является искусственно ослабленным звеном в электрической цепи, которое должно перегореть первым при возникновении токов короткого замыкания. Предохранитель состоит из корпуса с присоединительным колпачком. Ток. На который рассчитан предохранительный колпачок, является номинальным током предохранителя.
Достоинства предохранителя:
- высокое быстродействие;
- возможность построения селективной защиты;
- применение предохранителя при их правильном выборе не приведет к увеличению сечения проводника.
Недостатки предохранителей:
- возможность возникновения неполнофазного режима при перегорании одного предохранителя;
- одноразовость использования.
Выбор предохранителей с малой тепловой инерцией производится по следующим условиям:
1. Iнп>Iн, (10.1)
где: Iнп – номинальный ток предохранителя,
Iн – номинальный ток электродвигателя.
2. Ib>λI*Iн, (10.2)
где: Ib – номинальный ток плавкой вставки,
λI – кратность пускового тока (примем λI=6).
λI*Iн=6*3.56=21.4 А.
Выбираем из [15] предохранители типа ПНБ5 со следующими паспортными данными ( табл. 10.1):
Таблица 10.1.
|
Iнп, A |
Ib, A |
Uн, В |
| 5 | 27 | 220 |
Как говорилось выше, при перегорании одного предохранителя может возникать несимметричный режим. Для данной установки это обстоятельство несущественно, так как при возникновении такого режима срабатывает электронная защита преобразователя частоты. Защита от перегрузок и короткого замыкания для остальных электродвигателей и электронагревателей выполнена с помощью автоматических выключателей QF1…QF4 с комбинированными расцепителями.
Автоматические выключатели являются более совершенными аппаратами, так как отключают все три фазы в трехфазных сетях.
Выбор автоматического выключателя производится по следующим условиям:
Iнр>Iн, (10.3)
где: Iнр – номинальный ток расцепителя, и
Iсрр>1.25*λI*Iн, (10.4)
где: Iсрр – ток срабатывания расцепителя.
Автоматический выключатель QF1 выбираем по току электродвигателя вентилятора.
1.25*λI*Iн=1.25*6*4.9=36.8 А.
Выбираем из [15] АВ QF1 типа АЕ20000 со следующими техническими данными (табл. 10.2):
Таблица. 10.2.
|
Iпр, А |
Iср.р, А |
tоткл, с |
Uн, В |
| 10 | 50 | 0.02 | 220 |
Автоматический выключатель QF2 примем таким же как и QF1, т.к. мощность двигателей, подключенных к ним, одинакова.
Автоматический выключатель QF3 примем таким же как и QF2.
10.3 Составление таблицы перечня элементов производственной установки
Составим таблицу перечня элементов схемы пульта управления хлебопекарной печью. Элементы схемы были выбраны в пункте 8.4.2.
11. НАЛАДКА И ДИАГНОСТИКА ЭЛЕКТРОПРИВОДА И СИСТЕМЫ АВТОМАТИЗАЦИИ УСТАНОВКИ
11.1 Наладка и диагностика электропривода
В процессе наладки электропривода следует выполнить следующие действия:
1. Произвести визуальный осмотр электромонтажа преобразователя
частоты и электродвигателя.
2. Необходимо убедиться, правильно ли подключен преобразователь частоты к силовой цепи. Три силовых фазы должны подключаться к клеммам L1, L2, L3, а нулевой провод – к клемме РЕ.
3. Убедиться, правильно ли подключен электродвигатель к ПЧ. Выходные клеммы преобразователя частоты Т1, Т2, Т3, а двигателя – U, V, W.
4. Проверить, правильно ли собрано соединение обмоток фаз двигателя (звезда или треугольник).
5. Убедиться, надежно ли зажаты провода в клеммах ПЧ и электродвигателя.
6. Проверить, существуют ли контура зануления для ПЧ и электродвигателя.
7. Измерить сопротивление изоляции электродвигателя. Сопротивление изоляции должно быть больше 100 МОм. В противном случае заменить электродвигатель.
8. Проверить, соединен ли экран силового кабеля со специальным зажимом на преобразователе VLT с корпусом управляющего устройства. Проверить, не превышает ли длина силового кабеля предельную. Длина силового кабеля должна быть меньше 150 м.
9. Ввести или проверить при помощи пульта управления правильно ли введена программа управления.
10. Проверить наличие предохранителей между питающей сетью и преобразователем VLT. Удостовериться в их исправности, измерив их сопротивление.
Преобразователь частоты VLT5003 имеет развитую систему диагностирования. Все сообщения о состоянии ПЧ делятся на сообщения: о состоянии, об аварии и предупреждения.
Сообщения о состоянии:
- запуск по часовой стрелке / против часовой стрелки;
- снижение выходной частоты ПЧ до установленного значения;
- увеличение выходной частоты ПЧ до установленного значения;
- сигнал обратной связи ниже установленного;
- сигнал обратной связи выше установленного;
- выходная частота ниже установленной;
- выходная частота выше установленной;
- выходной ток выше номинального;
- режим разгона или торможения;
- толчковый режим, дистанционное управление;
- регулирование перенапряжения и т. д..
Сообщения об аварии:
- перенапряжение в инверторе при торможении;
- напряжение в промежуточной цепи инвертора ниже предельного;
- напряжение в промежуточной цепи инвертора выше предельного;
- протекаемый в инверторе длительное время ток выше допустимого;
- температура двигателя выше допустимой;
- термометр сопротивления, расположенный в двигателе, отключен;
- момент двигателя выше допустимого;
- пиковый ток инвертора выше допустимого;
- неисправность заземления;
- короткое замыкание;
- адаптация ПЧ к двигателю не выполняется;
- мощность двигателя слишком мала для данного ПЧ;
- мощность двигателя слишком велика для данного ПЧ;
- в ПЧ появилась внутренняя неисправность;
- потеря фазы двигателя;
- быстрый разряд конденсаторов в цепи постоянного тока не выполняется.
Предупреждения:
- неисправность в процессе тестирования тормоза;
- неисправность тормозного резистора;
- мощность тормозного резистора 100%;
- температура радиатора слишком высока;
- неисправность в сети питания;
- неисправность инвертора;
- неисправность связи по шине пользователя;
- напряжение на плате управления ниже 10 В;
- двигатель не подключен;
- и т.д.
11.2 Наладка системы автоматизации
В процессе наладки системы автоматизации необходимо выполнить следующие действия:
1. Провести визуальный осмотр программируемого контроллера. Убедиться в отсутствии механических повреждений.
2. Проверить, правильно ли присоединены провода к клеммам ПК.
3. Убедиться в наличии контура заземления.
4. Убедиться в наличии общего потенциала для всех модулей контроллера.
5. Настроить регуляторы температуры электронагревателей.
В связи с тем, что расчет динамических параметров электропечей сопротивления трудоемок и неточен, применяют экспериментальные методы их определения. Наиболее простым является метод снятия кривой разгона печи. Такую кривую получают при нагреве печи при номинальной мощности. Вид кривой показан на рис.11.1.
Как видно из рис.11.1, вначале из-за запаздывания термометра сопротивления регистрируемая в печи температура почти не поднимается, затем она начинает расти и пересекает в точке 1 значение заданной температуры. Если провести касательную к начальному участку нагрева ab, то мы сможем получить как постоянную времени Ттп, так и обусловленное термопарой запаздывание t0. Естественно, что такого рода данные тоже являются весьма приближенными. В таблице 11.1 даны эмпирические значения таких параметров, оптимальные значения, обеспечивающие переходный процесс с 20% - ным перерегулированием, и диапазон допустимых настроек [23].
6. Выбрать закон регулирования и произвести пуск печи. Время нагрева печи должно быть не менее половины часа.
Таблица 11.1.
|
Закон регу лиро вания |
Настройка регулятора | |||||
|
Коэффициент усиления Кр |
Постоянная времени интегрирования Ти, с |
Постоянная времени дифференцирования Тд, с |
||||
| Оптимальная уставка | Диапазон | Оптималь ная уставка | Диапазон | Оптимальная уставка | Диапазон | |
|
П ПИ ПИД |
0.5Кр.пр 0.25Кр.пр 1.5Кр.пр |
(0.25-0.5)Кр.пр (0.2-0.3)Кр.пр (0.7-1.0)Кр.пр |
— 1.4Тпр Тпр |
— (1-2)Тпр (0.5-1.0)Тпр |
— — 0.125Тпр |
— — (0.1-0.3)Тпр |
12. ОХРАНА ТРУДА
12.1 Правила эксплуатации хлебопекарной печи
Хлебопекарная печь представляет собой сложное инженерное сооружение. Печь состоит из хлебопекарной камеры (графическая часть: лист 1), сетчатого пода, механизма опрыскивания, механизма очистки ленты и вентилятора. Конвейер сетчатого пода транспортирует тестовые заготовки в хлебопекарную камеру, где они подвергаются гигротермической обработке. Заданный температурный режим поддерживается с помощью регуляторов напряжения и электронагревателей. Для придания выпекаемому изделию глянцевитого вида в пекарную камеру подается пар. Тестовые заготовки из расстойного шкафа загружаются на сетчатый под автоматически при помощи вспомогательного конвейера. Выпечка должна быть непрерывна, поэтому оператору необходимо следить за загрузкой тестовых заготовок. Продолжительность выпечки, температура в пекарной камере и влажность паро-воздушной среды должны соответствовать сорту выпекаемых изделий. Время выпечки регулируется при помощи преобразователя частоты, который изменяет его скорость вращения. При аварии печного конвейера в электропечи часто повреждаются электронагреватели, что может привести к тяжелым последствиям. Поэтому необходимо регулярно и тщательно следить за исправным состоянием конвейера, не допуская в его работе отклонений или неисправностей. Одновременно с включением электронагревателей необходимо включать в работу конвейер печи.
Для выпечки хлебобулочных изделий, требующих гигротермической обработки, – батонов, городских булок и т. п., – необходимо обеспечить наличие паро-воздушной среды с высокой влажностью в начальной стадии процесса выпечки. Паровой режим пекарной камеры регулируют, изменяя в нужных пределах количество подаваемого пара и степень открытия шиберов заслонок.
Для снижения влажности в пекарной камере уменьшают количество подаваемого пара. В случае необходимости подвергают пекарную камеру искусственному вентилированию путем включения вентилятора.
Во время работы печей необходимо следить, чтобы не было утечки пара из пекарной камеры. Утечка пара может происходить в местах заделки увлажнительных труб, а также в тех местах, где фронтовое ограждение камеры (выше посадочного устья) и перекрытие пекарной камеры соединяют с боковыми панелями печи. Неплотности, появившиеся в этих местах, должны бать немедленно устранены.
Во время планово-предупредительного ремонта печей производится осмотр рабочей камеры. Все неплотности и щели должны быть плотно заделаны асбестом.
Каждые 6 – 7 дней необходимо производить смазку узлов печей, применяя материалы и соблюдая сроки, указанные в карте смазки, проверить качество натяжения цепей и клиновых ремней.
Минеральная вата во всех полостях должна быть достаточно уплотнена для исключения самопроизвольного спрессовывания во время работы, что приводит к местному перегреву обшивок печи.
Электрическая схема предусматривает сигнализацию о включении и выключении механизмов печи при помощи сигнальных ламп, установленных на пульте управления. Схемой также предусмотрена звуковая сигнализация аварийного останова привода конвейера печи.
Выгрузка готовой продукции на выходе из пекарной камеры происходит в вспомогательный конвейер, который транспортирует хлебобулочные изделия по кругу до их остывания. Из этого конвейера оператор складывает продукцию в поддоны, а также отбирает брак. Оператору необходимо следить за качеством отбираемой продукции и в случае необходимости корректировать время выпечки и температурный режим в зонах печи.
12.2 Техника безопасности и охрана труда
Хлебопекарная печь является электроустановкой, следовательно при ее эксплуатации возникает опасность поражения обслуживающего персонала электрическим током. Дверцы ограждений электронагревателей и щитов охлаждения должны запираться ключом с помощью внутренних замков. На двери заграждений наносятся предупредительные надписи: «Под напряжением, опасно для жизни». На внутренней стенке каждого электрощита вывешиваются электрические схемы.
Печи и электрощиты должны иметь болты для последующего присоединения к ним линий зануления или заземления. На месте установки болтов наносится маркировка «заземление» или «земля».
Все металлические части печи, могущие оказаться под напряжением, должны иметь надежный электрический контакт с заземляющим болтом. В электрической схеме должна бать предусмотрена защита от короткого замыкания, для отключения электроустановки в случае пробивки изоляции на токопроводящие части печи. Электрическая схема печи должна соответствовать требованиям ПТБ, ПУЭ и ПТЭ. На электродвигателях и приводимых ими в движение механизмах должны быть нанесены стрелки, указывающие направления вращения. Корпуса электродвигателей и управляющих ими электромагнитных пускателей должны быть занулены или заземлены. Также должны быть занулены или заземлены электронагреватели. Соединительные токоведущие части должны быть надежно изолированы и ограждены. Сопротивление заземляющих устройств, использующихся для заземления электрооборудования, должно быть не более 4 Ом. Сопротивление изоляции в цепи управления электроприемников должно быть больше 0.5 МОм, а в силовой цепи – больше 1 МОм. Раз в год должны проводиться профилактические работы: проверка наличия заземления, измерение сопротивления контуров заземления и выборочное измерение сопротивления изоляции электропотребителей. При остановке печи на длительное время, на период ремонта, а также на время проверки электрооборудования печь необходимо отключить от сети.
При эксплуатации печи из-за работы регуляторов напряжения, электродвигателей, механических передач создается шум. В соответствии с СН 785 – 69 Уровень шума от работающей печи не должен превышать 65 – 70 децибел, шкала А; вибрация на рабочем месте от печи, работающей на установившихся режимах, не более 97 децибел, или 0.35 см/с, в соответствии с СН 627 – 66.
При выпечке хлеба происходит выделение углекислого газа. Поэтому в цеховом помещении должны устанавливаться газоанализаторы, по сигналу которых должна включаться аварийная сигнализации.
Все вращающиеся механические части кинематических цепей механизмов печи должны быть ограждены защитными кожухами. Чистка и смазка механизмов при работе печи воспрещается.
При эксплуатации хлебопекарной печи из-за несовершенства теплоизоляционной конструкции происходит выделение тепла. Наиболее важными пожарно-профилактическими мерами, предусмотренными правилами пожарной безопасности направленными на предотвращение возникновения тепловых импульсов, являются:
а) Предупреждение перегрева подшипников, трущихся деталей и материалов путем своевременной смазки, соблюдения технологии работ, контроля за режимом работы оборудования и контроля за температурным режимом. Температура наружной облицовки печи не должна превышать 45 °С, а температура подшипниковых узлов не должна превышать 60 °С.
б) Изолирование электронагревателей от горючих материалов и конструктивных элементов печи.
в) Обеспечение эффективной вентиляции, исключающей возможность образования в атмосфере помещений пожароопасной смеси.
г) Наличие в хлебопекарном цеху средств тушения пожара.
д) Оборудование хлебопекарного цеха противопожарной сигнализацией.
Как правило, заводские помещения имеют комбинированную систему освещения. Освещенность рабочего места оператора (у выхода хлебобулочных изделий из хлебопекарной камеры) должна соответствовать нормам освещенности. При комбинированной системе освещения, малой точности зрительной работы, среднем контрасте объекта с фоном и газоразрядном источнике света освещенность рабочего места должна быть не ниже 200 лк.
Для наблюдения за тестовыми заготовками в пекарной камере должны быть установлены местные источники света с кнопкой управление у смотрового окна.
Обслуживающий персонал печи должен быть обучен правилам безопасности, действующим на хлебозаводе. Обслуживание электрооборудования печи поручается лицам, имеющим I квалификационную группу по технике безопасности. Для обслуживания системы автоматического регулирования температуры обслуживающему персоналу необходимо изучить инструкцию на регуляторы температуры и регуляторы переменного тока РОТ.
12.3 Расчет зануления
Поражение человека электрическим током возможно как при случайном прикосновении его непосредственно к токоведущим частям, так и к металлическим нетоковедущим элементам электрооборудования (корпусу электрических машин, ванн, светильников и т.д.), которые могут оказаться под напряжением в результате какой-либо аварийной ситуации (замыкания фазы на корпус, повреждения изоляции и т.п.).
Защитное заземление и зануление являются наиболее распространенными, весьма эффективными и простыми мерами защиты от поражения электрическим током при появлении напряжения на металлических нетоковедущих частях (металлических корпусах оборудования).
Опасность поражения электрическим током при прикосновении к корпусу и другим нетоковедущим металлическим частям электрооборудования, оказавшимся под напряжением, может быть устранена быстрым отключением поврежденного электрооборудования от питающей сети. Для этой цели используется зануление (см. рис. 12.1). Зануление – это преднамеренное электрическое соединение с нулевым защитным проводником металлических нетоковедущих частей, которые могут оказаться под напряжением. Принцип действия зануления – превращение замыкания на корпус в однофазное короткое замыкание (между фазным и нулевым проводником).
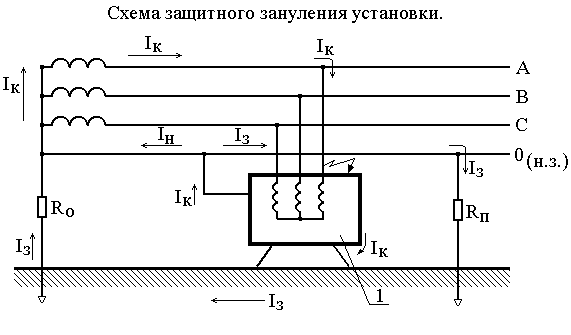
Рис. 12.1.
На рисунке:
1 – корпус;
R0 – сопротивление заземления нейтрали источника тока;
Rп – сопротивление повторного заземления нулевого защитного проводника;
Iк – ток к.з.;
Iн – часть тока короткого замыкания, протекающая через нулевой проводник;
Iз – часть тока короткого замыкания, протекающая через землю;
0 (н.з.) – нулевой защитный проводник.
Отключение поврежденной установки от питающей сети произойдет, если значение тока однофазного короткого замыкания (Iк), которое искусственно создается в цепи, будет больше (или равно) значения тока срабатывания автоматического выключателя (или номинального тока плавкой вставки предохранителя Iном) и выполняется следующее условие:
Iк ³ kIном ,
где k – коэффициент кратности тока, выбирается в зависимости от типа защиты электроустановки.
Для проверки обеспечения отключающей способности зануления необходимо проверить следующее условие:
Iк2 ³ Iк1.
Для этого необходимо определить:
наименьшее допустимое значение тока (Iк1) которого замыкания, при котором произойдет срабатывание защиты и поврежденное оборудование отключится от сети;
действительное значение тока однофазного короткого замыкания, которое будет иметь место в схеме при возникновении аварии (Iк2).
Определим величину тока Iк1:
Iк1 = kIном = 1.25×80 = 100 А,
где Iном = 80 А – номинальный ток срабатывания автоматического выключателя.
Определим полное сопротивление петли «фаза-нуль»:
Zп = ![]() =
= ![]() =
=
1.26 Ом,
где Rф = 0.9 Ом (медь), Rн.а = 0.308 Ом (сталь). – активное сопротивление фазного и нулевого защитного проводников;
Хф = 0.033 Ом, Хн.а = 0.308 Ом – внутреннее индуктивные сопротивления фазного и нулевого проводников;
Хп – внешнее индуктивное сопротивление петли «фаза-нуль» (0.02 Ом).
Находим действительное значение тока однофазного короткого замыкания, проходящего в схеме в аварийном режиме:
 =
=  =131.6, А,
=131.6, А,
где Uф – фазное напряжение, В;
Zп – полное сопротивление цепи «фаза-нуль», Ом;
Zт – полное сопротивление трансформатора, Ом.
Сравним действительные (вычисленные) значения токов однофазного короткого замыкания (Iк2) с наименьшим, допустимым по условиям срабатывания защиты током (Iк1):
131.6 А > 112 А, то есть Iк2 ³ Iк1,
следовательно отключающая способность системы зануления обеспечена и нулевой защитный проводник выбран правильно.
13. ТЕХНИКО-ЭКОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ
13.1 Общие сведения
Расчет технико-экономических показателей осуществляется на основе анализа сравнительных технических данных двух альтернативных систем электропривода. Экономическая оценка базируется на принципе минимальных расходов: минимальных начальных затрат, эксплуатационных затрат, затрат электроэнергии. Наиболее целесообразным по техническим соображениям принять электропривод переменного (ПЧ-АД) тока. В качестве альтернативной системы можно выбрать электропривод постоянного тока. Технические данные двигателей сравниваемых систем приведены в таблице 13.1
Таблица 13.1.
Технические данные двигателей сравниваемых систем.
| Номер варианта |
Первый вариант Привод переменного тока |
Второй вариант Привод постоянного тока |
| Тип двигателя | АИР80В4 | 4ПФ80М |
| Мощность, кВт | 1.5 | 1.5 |
| КПД, % | 77 | 74 |
| Частота вращения, об/мин | 1492 | 1500 |
13.2 Расчет начальных затрат
Начальные затраты определяются путем расчета капитальных вложений, которые состоят из сметной стоимости электропривода, стоимости пускорегулирующей аппаратуры, стоимости монтажных работ, транспортно-заготовительных расходов и плановых накоплений монтажной организации. Поскольку целью экономического расчета является сравнение альтернативных вариантов, при расчете можно пренебречь наличием резервного электропривода, что никак не повлияет на результат. Наиболее дорогостоящими составляющими электропривода являются двигатель и преобразователь. Таким образом, сметная стоимость электропривода:
для первого варианта
kэп1 = kдв1+kп1 = 142,5+545 = 687,5 млн. бел. руб.,
где kдв1 – стоимость электродвигателя (АД КЗ), млн.бел.руб.;
kп1 – стоимость преобразователя, млн.бел.руб.;
для второго варианта
kэп2 = kдв2+kп2 = 445+240 = 685 млн. бел. руб.,
где kдв2 – стоимость электродвигателя (ДПТ), млн. бел. руб;
kп2 – стоимость выпрямителя, млн. бел. руб.
Стоимость пускорегулирующей аппаратуры определяется как определенная часть (12%) стоимости преобразователя. Тогда:
для первого варианта
kпр1 = 0,12×kп1 = 0,12× 687,5 = 82,5 млн. бел. руб,
для второго варианта
kпр2 = 0,12×kп2 = 0,12×685 = 82,2 млн. бел. руб.
Стоимость монтажных работ вычисляется отдельно для электропривода и рабочего механизма. Для электропривода эту величину можно принять равной 6% от стоимости электропривода kэп, для рабочего механизма – 5% стоимости электропривода. Таким образом стоимость монтажных работ:
для первого варианта
kмр1 = (0,06+0,05)×kэп1 = (0,06+0,05)×687,5 = 75,625 млн. бел. руб.,
для второго варианта
kмр2 = (0,06+0,05)×kэп2 = (0,06+0,05)×685 = 75,35 млн. бел. руб.
Транспортно-заготовительные расходы составляют 2% от суммы стоимости электропривода и стоимости монтажных работ:
для первого варианта
kтзр1 = 0,02×(kэп1+kмр1) = 0,02×(687,5+75,625) = 15,3 млн. бел. руб.,
для второго варианта
kтзр2 = 0,02×(kэп2+kмр2) = 0,02×(685+75,35) = 15,207 млн. бел. руб..
Плановые накопления монтажной организации составляют 10% от стоимости монтажных работ:
для первого варианта
kпн1 = 0,1×kмр1 = 0,1×75,625 = 7,5625 млн. бел. руб.,
для второго варианта
kпн2 = 0,1×kмр2 = 0,1×75,35 = 7,535 млн. бел. руб.
Для наглядности выполненный расчет капитальных вложений для обоих вариантов сведен в таблицу 13.2.
Таблица 13.2.
Расчет капитальных вложений.
| Источники затрат |
Привод переменного тока. Ст-ть, млн. бел. руб. |
Привод постоянного тока. Ст-ть, млн. бел. руб. |
| электродвигатель | 142,5 | 445 |
| преобразователь | 545 | 240 |
| п-рег. аппаратура | 82,5 | 82,2 |
| монтажные работы | 75,625 | 75,35 |
| Транспортно-заготовительные расходы | 15,3 | 15,207 |
| плановые накопления монтажной организации | 7,5625 | 7,535 |
| суммарные кап. вложения | 868,5 | 865,292 |
13.3 Определение эксплуатационных затрат
При расчете эксплуатационных затрат важное значение имеет величина периода, за который производится расчет. При сравнении приводов постоянного и переменного тока ограничимся периодом 1 год.
Годовые эксплуатационные расходы – это суммарные затраты на электропривод и рабочий механизм, необходимые для эксплуатации механизма в течении года и выпуска годового объема продукции, т.е. себестоимость эксплуатации механизма. Годовые эксплуатационные расходы в общем случае включают в себя стоимость потребленной электроэнергии, амортизационные отчисления и годовые затраты по эксплуатации электрической части установки.
Затраты на электроэнергию определяются количеством энергии, потребляемой за год, номинальной мощностью двигателя, а также тарифной ставкой на электроэнергию. Для расчета энергии, потребляемой за год, нужно знать суммарное время работы электропривода за год, которое определяется коэффициентом использования:
kисп=(ПВ× tраб.см )/tсм = (100×8)/8 = 1,
где: ПВ - продолжительность включения установки, %;
tраб.см - продолжительность работы установки за смену, ч.;
tсм – число рабочих часов за смену.
Зная коэффициент tисп можно определить число рабочих часов установки в году:
Тг=Траб.дн×nсм× tсм× kисп=253×1×8×1=2024 ч.,
где : Траб.дн - число рабочих дней в году;
nсм - число рабочих смен в сутки (так работает сборочный цех).
Энергия, потребляемая за год, определяется по формулам:
для первого варианта
Эг1=Pдв.н1×Тг / hн1=11×2024 / 0,875=25444,6 кВт×ч,
где: Pдв.н1, hн1 – номинальные параметры двигателя переменного тока (АД КЗ);
для второго варианта
Эг2=Pдв.н2×Тг / hн2=22×2024 / 0,8=27830 кВт×ч,
где Pдв.н2, hн2 – номинальные параметры двигателя постоянного тока (ДПТ).
Таким образом, затраты на электроэнергию:
для первого варианта
Cз1=Pдв.н1×Cосн×12+ Эг1×Сдоп
Cз1=11×1164,992×12+25444,6×9,17=387106 тыс. бел. руб ,
где : Сосн – тарифная ставка, руб/кВт×ч (основная плата за 1 месяц);
Cдоп – тарифная ставка, руб/кВт×ч (дополнительная плата).
для второго варианта
Cз2=Pдв.н2×Cосн×12+ Эг2×Сдоп
Cз2=11×1164992 .12+27830×9,17=408980 тыс. бел. руб.
Амортизационные отчисления составляют 9,5 % от сметной стоимости электропривода. Тогда
для первого варианта
Cа1 =0,095×kэп1 =0,095×687,5=65,3125 млн. бел. руб.,
где: kэп1 – сметная стоимость электропривода постоянного тока;
для второго варианта
Cа2 =0,095×kэп2 =0,095×685=65,075 млн. бел. руб.,
где: kэп2 – сметная стоимость асинхронного электропривода.
Издержки на эксплуатацию оборудования включают в себя множество составляющих. Оборудование электроприводов обоих вариантов является ремонтируемым, оно проходит планово-предупредительные ремонты, периодичность и объем проведения которых регламентируется сметой планово-предупредительных ремонтов. Кроме того оборудование нуждается в регулярном техническом обслуживании, требующем также определенных затрат. Таким образом, затраты на ремонтно-эксплутационное обслуживание оборудования можно определить как сумму затрат на заработную плату ремонтных рабочих, стоимости материалов для ремонта и обслуживания, общецеховых и общезаводских расходов.
Заработная плата ремонтных рабочих определяется количеством времени, необходимым для проведения ремонтно-эксплутационного обслуживания электрической части оборудования, которая в свою очередь зависит от норм трудоемкости ремонта и технического обслуживания оборудования. Всю систему электропривода можно разделить на 4 основные части: двигатель, преобразователь, трансформатор и пускорегулирующая аппаратура. Для каждой из этих частей отдельно находится трудоемкость ремонта и технического обслуживания. Затем эти величины суммируются. Для расчета трудоемкости требуется определить плановую продолжительность ремонтного цикла и межремонтного периода, число ремонтов в год и т.д.
Плановая продолжительность ремонтного цикла (ремонтный цикл – наработка энергетического оборудования, выраженная в годах календарного времени между двумя капитальными плановыми ремонтами):
для асинхронного электродвигателя
Тпл.2дв=Ттабл.двbрbо=9×2×0,85=15,3 года,
для электродвигателя постоянного тока
Тпл.1дв=Ттабл.двbкbрbо=9×0,75×2×0,85=11,5 лет,
где: Ттабл.дв - продолжительность ремонтного цикла для электродвигателей;
bк – коэффициент, учитывающий уменьшение срока службы коллекторных машин;
bр – коэффициент, определяемый сменностью работы оборудования;
bо – коэффициент, учитывающий уменьшение ремонтного цикла машин, отнесенных к категории основного оборудования;
для трансформатора
Тпл.тр=Ттабл.трbо=9×0,85=6,8 года,
где: Ттабл.тр - продолжительность ремонтного цикла для трансформаторов;
для преобразователя частоты
Тпл.пр =Ттабл.прbо=6×0,85=5,1 года,
где: Ттабл.вып - продолжительность ремонтного цикла для преобразователей частоты.
для тиристорного выпрямителя
Тпл.вып=Ттабл.выпbо=10×0,85=8,5 года,
где: Ттабл.вып - продолжительность ремонтного цикла для тиристорных выпрямителей.
Плановая продолжительность межремонтного периода (межремонтный период – наработка энергетического оборудования, выраженная в месяцах календарного времени между двумя плановыми ремонтами):
для асинхронного электродвигателя:
tпл.2дв=tтабл.двbрbо=9×2×0,7=12,6 мес.,
для двигателя постоянного тока:
tпл.1дв=tтабл.двbкbрbо=9×0,75×2×0,7=9,45 мес.,
где: tтабл.дв - величина межремонтного периода для двигателя ;
для трансформатора
tпл.тр=tтабл.трbо=6×0,7=4,2 мес.,
где: tтабл.тр - продолжительность межремонтного периода для трансформаторов
для тиристорного выпрямителя
tпл.вып=tтабл.выпbо=24×0,7=16,8 мес.,
где: tтабл.вып - продолжительность межремонтного периода для тиристорных выпрямителей;
для преобразователя частоты
tпл.пр =tтабл.прbо=18×0,7=12,6 мес.,
где: tтабл.пр - продолжительность межремонтного периода для преобразователей частоты .
По полученным величинам можно рассчитать количество капитальных и текущих ремонтов в расчете на 1 год. Количество капитальных ремонтов в год:
для асинхронного электродвигателя:
Мк.р.1дв=1/Tпл.2дв=1 / 15,3=0,065,
для двигателя постоянного тока:
Мк.р.2дв=1/Tпл.1дв=1 / 11,5=0,087,
для трансформатора:
Мк.р.тр=1/Tпл.тр=1 / 6,8=0,147,
для преобразователя частоты:
Мк.р.пр=1/Tпл.пр=1 / 5,1=0,196,
для выпрямителя:
Мк.р.вып=1/Tпл.вып=1 / 8,5=0,118.
Количество текущих ремонтов в расчете на 1 год определяется аналогично:
Мт.р.1дв=0,08, Мт.р.2дв=0,106, Мт.р.тр=0,238,
Мт.р.пр=0,079 Мт.р.вып=0,06.
По заданному количеству ремонтов в год, а также по заданной норме трудоемкости определяется годовая трудоемкость ремонтов. Годовая трудоемкость капитальных ремонтов электрических машин рассчитывается по формулам:
для асинхронного двигателя
Тк.р.1дв = Мк.р.1дв × Нк.р.дв × kw= 0,065×32×1,1 = 2,3 человеко-часа.
для двигателя постоянного тока
Тк.р.2дв = Мк.р.2дв × Нк.р.дв × kw×kк = 0,087×32×1,1×1,8 = 5,51 человеко-часа,
где: Нк.р.дв – норма трудоемкости капитальных ремонтов для электродвигателей заданной мощности;
kw – поправочный коэффициент, учитывающий частоту вращения электродвигателя;
kк – коэффициент, учитывающий увеличение трудоемкости эксплуатации коллекторных машин;
Для трансформатора, преобразователя частоты и тиристорного выпрямителя годовая трудоемкость капитальных ремонтов рассчитывается следующим образом:
Тк.р.тр = Мк.р.тр × Нк.р.тр = 0,147×88 = 12,94 человеко-часа,
Тк.р.пр = Мк.р.пр × Нк.р.пр = 0,196×50 = 9,8 человеко-часов,
Тк.р.вып = Мк.р.вып × Нк.р.вып = 0,118×35 = 4,13 человеко-часов,
где Нк.р.тр – норма трудоемкости капитального ремонта для трансформаторов;
Нк.р.пр и Нк.р.вып – нормы трудоемкости капитлаьного ремонта преобразователей частоты и выпрямителей соответственно.
Годовая трудоемкость текущих ремонтов для соответствующих типов оборудования определяется аналогично трудоемкости капитальных ремонтов:
Тт.р.1дв = Мт.р.2дв × Нт.р.дв × kw= 0,08×7×1,1 = 0,62 человеко-часа,
Тт.р.2дв = Мт.р.1дв × Нт.р.дв × kw×kк = 0,106×7×1,1×1,8 = 1,47 человеко-часа,
Тт.р.тр = Мт.р.тр × Нт.р.тр = 0,238×17 = 4,05 человеко-часа,
Тт.р.пр = Мт.р.пр × Нт.р.пр = 0,079×15 = 1,19 человеко-часа,
Тт.р.вып = Мт.р.вып × Нт.р.вып = 0,06×10 = 0,6 человеко-часа,
где: Нт.р.дв, Нт.р.тр, Нт.р.вып и Нт.р.пр – нормы трудоемкости текущего ремонта для различных типов оборудования (находятся по тем же таблицам, что и для капитального ремонта).
Для пускорегулирующей аппаратуры годовая трудоемкость капитального (текущего) ремонта принимается равной 25% от трудоемкости капитального (текущего) ремонта электропривода, которое в свою очередь складывается из трудоемкости ремонта двигателя, трансформатора и преобразователя:
для электропривода переменного тока:
Тп.р.к.р.1 = 0,25×(Тк.р.1дв+Тк.р.тр+Тк.р.пр) =
= 0,25×(2,3+12,94+9,8) = 6,26 человеко-часа,
Тп.р.т.р.1 = 0,25×(Тт.р.1дв+Тт.р.тр+Тт.р.пр) =
= 0,25×(0,62+4,05+1,19) = 1,47 человеко-часа.
для электропривода постоянного тока:
Тп.р.к.р.2 = 0,25×(Тк.р.2дв+Тк.р.тр+Тк.р.вып) =
= 0,25×(5,51+12,94+4,13) = 564 человеко-часа,
Тп.р.т.р.2 = 0,25×(Тт.р.2дв+Тт.р.тр+Тт.р.вып) =
= 0,25×(1,47+4,05+0,6) = 1,53 человеко-часа.
Трудоемкость технического обслуживания оборудования принимается равной 10% от нормы трудоемкости текущего ремонта оборудования без учета поправочных коэффициентов. Таким образом, годовую трудоемкость обслуживания оборудования можно определить по формулам:
для электропривода переменного тока
Тт.о.1пр = 1.2×12×Нт.р.пр = 0.1×12×15 = 18, человеко-часов,
Тт.о.тр = 0,1×12×Нт.р.тр = 0,1×12×17 = 20,4 человеко-часа,
Тт.о.пр = 0,1×12×Нт.р.пр = 0,1×12×10 = 12 человеко-часа;
для электропривода постоянного тока:
Тт.о.2дв = 0,1×12×Нт.р.дв = 0,1×12×7 = 8,4 человеко-часа,
Тт.о.тр = 0,1×12×Нт.р.тр = 0,1×12×17 = 20,4 человеко-часа,
Тт.о.вып = 0,1×12×Нт.р.вып = 0,1×12×10 = 12 человеко-часа.
Трудоемкость технического обслуживания электропривода за год:
для электропривода переменного тока:
Тп.р.т.о.1 = 0,1(Тт.о.1дв+Тт.о.тр+Тт.о.пр) = 0,1×(8,4+20,4+18) = 4,68 человеко-часов.
для электропривода постоянного тока:
Тп.р.т.о.2 = 0,1(Тт.о.2дв+Тт.о.тр+Тт.о.вып) = 0,1×(8,4+20,4+12) = 4,08, человеко-часов;
Для удобства сравнения выполненный расчет трудоемкости ремонта и технического обслуживания для обоих вариантов сведен в таблицу.
Таблица 13.3
Результаты расчетов трудоемкости ремонта и технического обслуживания оборудования рассматриваемых вариантов.
| Тип оборудования | Электропривод переменного тока | Электропривод постоянного тока | |
| Годовая трудоемкость капитальных ремонтов, человеко-часы | |||
| Электродвигатель | 2,3 | 5,51 | |
| Трансформатор | 12,94 | 12,94 | |
| Преобразователь | 9,8 | 4,1 | |
| Пускорегулирующая аппаратура | 6,26 | 5,64 | |
| Годовая трудоемкость текущих ремонтов, человеко-часы | |||
| Электродвигатель | 0,62 | 1,47 | |
| Трансформатор | 4,05 | 4,05 | |
| Преобразователь | 1,19 | 0,6 | |
| Пускорегулирующая аппаратура | 1,47 | 1,53 | |
| Годовая трудоемкость технического обслуживания, человеко-часы | |||
| Электродвигатель | 8,4 | 8,4 | |
| Трансформатор | 20,4 | 20,4 | |
| Преобразователь | 18 | 12 | |
| Пускорегулирующая аппаратура | 4,68 | 4,08 | |
| Суммарная трудоемкость эксплуатации оборудования, человеко-часы | |||
| Электропривод переменного тока | Электропривод постоянного тока | ||
| 90,11 | 80,72 | ||
По известной годовой трудоемкости эксплуатации оборудования, учитывая тарифную ставку ремонтного рабочего, а также соответствующие налоги можно определить затраты на заработную плату ремонтных рабочих за год:
для первого варианта:
Сз.п.1 = Ста×Снал×Тсум.1 =
= 0,017×(1+0,04+0,05+0,35+0,02)×90,11 = 2,24 млн. бел. руб.
для второго варианта:
Сз.п.2 = Ста×Снал×Тсум.2 =
= 0,017×(1+0,04+0,05+0,35+0,02)×80,72 = 2,01 млн. бел. руб.
где Стар - часовая тарифная ставка ремонтного рабочего, (по IV разряду)
Снал - Коэффициент, определяющий затраты на выплату налогов в связи с начислением зарплаты:
4% - Чернобыльский налог,
5% - начисление на содержание детских дошкольных учреждений,
35% - начисление на социальное страхование,
1% - начисление на пенсионных фонд,
25% - начисление на премирование,
10% - начисление на выплату дополнительной зарплаты;
Тсум.1 - суммарная трудоемкость эксплуатации оборудования электропривода переменного тока;
Тсум.2 - суммарная трудоемкость эксплуатации оборудования электропривода постоянного тока.
Стоимость материалов для ремонта и обслуживания оборудования принимается равной 100% от основной заработной платы ремонтных рабочих без учета затрат на выплату налогов:
для первого варианта
Смат.1 = Стар×Тсум.1 = 17 ×90,11 = 1,53 млн. бел. руб.,
для второго варианта
Смат.2 = Стар×Тсум.2 = 17×80,72 = 1,37 млн. бел. руб.
Общецеховые расходы принимаются равными 100% от основной заработной платы без учета налогов, т.е. в данном случае они равны стоимости материалов для ремонта и обслуживания оборудования:
Сц.1 = Смат.1 = 1,53 млн. бел. руб.;
Сц.2 = Смат.2 = 1,37 млн. бел. руб.
Общезаводские расходы принимаются равными 50% от основной заработной платы без учета налогов, т.е. в данном случае составляет половину общецеховых расходов:
Сз.1 = 0,5×Сц.1 = 0,5×1,532 = 0,76 млн. бел. руб.;
Сз.2 = 0,5×Сц.2 = 0,5×1,373 = 0,68 млн. бел. руб.
Таким образом, найдены все величины, необходимые для расчета годовых затрат по эксплуатации электрической части установки:
Сэкс.эл.1= Сз.п.1+ Смат.1+ Сц.1+ Сз.1=
= 2,24 + 1,53 + 1,53 + 0,76 = 6,07 млн. бел. руб.
Сэкс.эл.2= Сз.п.2 + Смат.2 + Сц.2 + Сз.2 =
= 2,01 + 1,37 + 1,37+ 0,68 = 5,44 млн. бел. руб.
Для определения годовых эксплуатационных расходов для обоих вариантов:
Сэкс1 = Сз1+ Са1 + Сэк1 = 0,76 + 65,31 + 387,1 = 458,4 млн. бел. руб.
Сэкс2 = Сз2 + Са2 + Сэк2 = 0,68 + 65,07 + 408,9 = 474,6 млн. бел. руб.
Приведенные затраты по сравниваемым вариантам определяется из выражения:
З=Ек.К+Сэкс,
где: Е = 0,15 – коэффициент, принимаемый по рекомендации ЮНИДО для развивающихся стран;
К – капиталовложения, млн. бел. руб.
З1 = Е.К1+Сэкс.1 = 0,15.868,5 + 458,4 = 588,7 млн. бел. руб.
З2 = Е.К2+Сэкс.2 = 0,15.865 + 479,5 = 609,3 млн. бел. руб.
13.4 Анализ полученных технико-экономических показателей
Полученные технико-экономические показатели сравниваемых систем приведены в табл. 13.4. Анализ и сопоставление капиталовложений, эксплуатационных затрат и затрат на электроэнергию показывает, что недостатком электропривода постоянного тока является высокая стоимость и ремонтная сложность электродвигателя, в то время как асинхронные двигатели являются наиболее простыми и дешевыми.
Поскольку разница приведенных затрат по расчетным вариантам составляет менее 5%, то варианты являются фактически равноценными, поэтому принимаем вариант с использованием привода переменного тока. При приблизительно равной стоимости привод переменного тока обладает наиболее лучшими технико-экономическими показателями. Произведенные расчеты показывают, что при использовании привода переменного тока экономится 20 миллионов 550 тысяч рублей.
Таблица. 13.4
Технико-экономические показатели сравниваемых систем.
| Наименование | Обозначение | Привод переменного тока | Привод постоянного тока |
|
Капиталовложения, млн. бел. руб. |
К | 868,5 | 865,2 |
|
Амортизационные отчисления, млн. бел. руб. |
Ca |
65,31 | 65,07 |
|
Плата за потребляемую электроэнергию, млн. бел. руб/г |
Cэ |
387,1 | 408,9 |
|
Заработная плата ремонтных рабочих, млн. бел. руб. |
Сз.п |
2,24 | 2,01 |
|
Стоимость материалов для ремонта электропривода, млн. бел. руб. |
Сат |
1,53 | 1,37 |
|
Цеховые расходы, млн. бел. руб. |
Сц |
1,53 | 1,37 |
| Общезаводские расходы, млн. бел. руб. |
Сз |
0,76 | 0,68 |
|
Эксплуатационные издержки по электрической части, млн. бел. руб. |
Сэкс.эл |
6,07 | 5,44 |
|
Эксплуатационные издержки по сравниваемым приводам, Млн. бел. руб. |
Сэкс |
458,4 | 474,6 |
|
Приведенные затраты по вариантам, млн. бел. руб. |
З | 588,7 | 609,3 |
ЗАКЛЮЧЕНИЕ
В данном дипломном проекте была произведена модернизация привода пода хлебопекарной печи А2–ХПЯ–25. Механическое регулирование продолжительности выпечки было заменено на электрическое по системе электропривода ПЧ – АД. Такая замена увеличит надежность и долговечность элементов кинематической цепи привода конвейера, уменьшит расходы на обслуживание оборудования и облегчит его обслуживание.
Также была произведена комплексная автоматизация хлебопекарной печи с помощью программируемого контроллера. Новая схема автоматизации, по сравнению со старой, обеспечивает коррекцию продолжительности выпечки по температуре во второй зоне пекарной камеры. Применение такой семы улучшит качество выпекаемой и уменьшит количество бракованной продукции. Применение программируемого контроллера увеличивает возможности контроля и регулирования параметров технологического процесса и увеличивает надежность схемы автоматизации.
В ходе работы над дипломным проектом были построены статические и динамические характеристики новой системы электропривода, рассчитаны технико-экономические показатели, рассмотрены вопросы техники безопасности и охраны труда.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Маклюков И. И., Шумаев Ф. Г. Промышленные печи хлебопекарного производства. – М.: Пищевая промышленность, 1971. – 392 с.
2. Печь хлебопекарная с электрообогревом марки А2 – ХПЯ – 25. Паспорт А2 – ХПЯ – 25. ПС.
3. Ключев В. И., Терехов В. М. Электропривод и автоматизация общепромышленных механизмов: учебник для вузов. – М.: Энергия, 1980. – 360 с.
4. Соколов М. М. Автоматизированный электропривод общепромышленных механизмов: учебник для вузов. – М.: Энергия, 1976. – 480 с.
5. Зенков Р. Л., Ивашков И. И. Машины непрерывного транспорта: учебник для вузов, – 2-е изд., перераб. и доп. – М.: Машиностроение, 1987. – 432 с.
6. Шейнблит А. Е. Курсовое проектирование деталей машин: учебное пособие для техникумов. – М.: Высш. шк., 1991. – 432 с.
7. Ключев В. И. Теория электропривода: учебник для вузов. – М.: Энергоатом издат, 1985. – 560 с.
8. Сандлер А. С., Сарбатов Р. С. Автоматическое частотное управление асинхронными двигателями. – М.: Энергия, 1974.
9. Электротехника. Реферативный журнал. №2 – №12 1997 год.
10. Михелев А. А. Справочник по хлебопекарному производству. – М.: Пищевая промышленность, 1987. – 352 с.
11. Копылов И. П. Справочник по электрическим машинам. Т1. – М.: Энергоатомиздат, 1989. – 688 с.
12. Преобразователи частоты серии VLT5000. Технические данные. 1997. – 60с.
13. Преобразователи частоты серии VLT5000. Руководство по эксплуатации. 1998. – 260 с.
14. Энергосбережение. Реферативный журнал. №5 1997 год.
15. Справочник по автоматизированному электроприводу/ Под ред. Елисеева В.А. и Шинянского А. В. – М.: Энергоатомиздат, 1983. – 616 с.
16. Power solutions. Product digest 48 SFC – 96. INTERNACIONAL RECTIFIER, USA, 1996.
17. Акимов И. И., Ващуков Е. П., Прохоренко В. А. Резисторы, конденсаторы, трансформаторы, коммутирующие устройства. РЭА Справочник – Мн.: Беларусь, 1994. – 591 с.
18. BTLITEV V. Mendo por frecuencia de las maginas electricas de corriente alterna. – Camaguey.: LUIS SANTANA ROSA. 1983. – 136 с.
19. Корлин Е. Б. Автоматизация технологических процессов пищевых производств. – М.: Пищевая промышленность, 1977. – 430 с.
20. Программируемый контроллер SIMATIC S5. Руководство по программированию.
21. Минеев Р. В., Михеев А. П., Рыжнев Ю. Л. Повышение эффективности электроснабжения электропечей. – М.: Энергоатомиздат, 1986. – 208 с.
22. Электрические кабели, провода и шнуры: Справочник/Белорусов Н. И. – М.: Энергоатомиздат, 1987. – 536 с.
23. Кручинин А. М., Махмудов К. М. Автоматическое управление электротермическими установками: учебник для вузов. – М.: Энергоатомиздат, 1990. – 416 с.