
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Дипломная работа: Розробка електронної моделі підготовки виробництва триступеневого конічно-циліндричного редуктора
Дипломная работа: Розробка електронної моделі підготовки виробництва триступеневого конічно-циліндричного редуктора
МIНIСТЕРСТВО ОСВIТИ І НАУКИ УКРАЇНИ
ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНIЧНИЙ УНIВЕРСИТЕТ
Німецький технічний факультет
Кафедра "СПУіМ"
БАКАЛАВРСЬКА РОБОТА
Тема роботи: Розробка електронної моделі підготовки виробництва триступеневого конічно-циліндричного редуктора
Виконавець
Студент групи Князєв Я.І.
Керівник Горобець І.О.
Нормоконтроль
Сулєйманов С.Л.
ДОНЕЦЬК 2009
РЕФЕРАТ
Бакалаврська робота : 102 сторінки, 22 таблиці,25 рисунків,18 джерел, 2 додатки .
Об’єкт дослідження – редуктор привода скребкового конвеєра .
Ціль роботи: підвищення ефективності конструкторсько–технологічної підготовки виробництва привода стружковбирального конвеєра.
Задачі:
Розрахунок елементів редуктора, розробка робочих і складальних креслень виробу і деталі;
Аналіз точності деталі та розробка креслення вимірювального пристрою;
Проектування технологічного процесу виготовлення деталі, розробка технологічної документації;
Динамічний аналіз МУВП, розробка імітаційної моделі та її аналіз засобами "Simulink".
У бакалаврській роботі необхідно провести розрахунок вихідних даних для проектування привода, а також розрахунок елементів редуктора і проектування вузлів виробу з визначенням властивостей об’єкту.
При виконанні даної роботи необхідно розробити 3D – модель вузла та виробу. Також необхідно провести аналіз складальної одиниці, та розробити креслення вимірювального пристрою.
У даній бакалаврській роботі необхідно провести динамічний аналіз муфти МУВП, розробити імітаційну модель та виконати її аналіз засобами "Simulink".
Розроблено: креслення приводу, складальне креслення редуктора в трьох проекціях і робочі креслення деталей.
ПРИВОД, РЕДУКТОР, СКЛАДАЛЬНА ОДИНИЦЯ, КРИШКА, ВАЛ, ШЕСТІРНЯ, КОЛЕСО ЗУБЧАСТЕ, ШПОНКА, ПІДШИПНИК, МУФТА, КАЛІБР, ДОПУСК, ВІДХИЛЕННЯ, ПОСАДКА, НАТЯГ, ЗАЗОР, ТЕХНІЧНІ ВИМОГИ, РОЗМІР, З'ЄДНАННЯ, ЗАГОТОВКА, СТАНОК, ЗУБЧАТЕ КОЛЕСО, ТЕХНОЛОГІЧНИЙ ПРОЦЕС, КАРТИ НАЛАДОК, РЕЖИМИ РІЗАННЯ, ОСНАЩЕННЯ, ДЕТАЛЬ, ПРИПУСКИ, ЧАС ОБРОБКИ, СОБІВАРТІСТЬ, МОМЕНТ ІНЕРЦІЇ, КРУТИЛЬНІ КОЛИВАННЯ
ЗМІСТ
ВСТУП
1. КОНСТРУКТОРСЬКА ПІДГОТОВКА ВИРОБНИЦТВА
1.1 Визначення вихідних даних до розрахунку редуктора
1.1.1 Вибір і перевірка електродвигуна
1.1.2 Розрахунок загального і поодиноких передатних відношень редуктора
1.1.3 Розрахунок частот обертання, потужностей і обертальних моментів на валах
1.1.4 Вибір розрахункового навантаження
1.2 Проектування конічної передачі
1.2.1 Вибір матеріалів для виготовлення колеса і шестерні
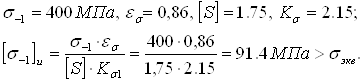
1.2.2 Приблизне визначення граничних та допустних напруг для матеріалів конічної передачі
1.2.3 Наближений проектувальний розрахунок головного і основних параметрів передач з умови забезпечення контактної міцності зубів
1.3 Розрахунок циліндричних передач
1.3.1 Наближений проектувальний розрахунок головного і основних параметрів передач з умови забезпечення контактної міцності зубів
1.3.2 Перевірочний розрахунок конічної зубчатої передачі
1.3.3 Перевірочний розрахунок циліндричних зубчатих передач
1.4 Конструювання зубчатих коліс
1.5 Проектування валів
1.5.1 Проектний розрахунок валу
1.5.2 Визначення навантажень, що діють на вал
1.5.3 Наближений розрахунок валу
1.6 Проектування вузлів підшипників кочення
1.6.1 Вибір підшипників кочення
1.6.2 Розрахунок підшипників кочення
1.7 Вибір і розрахунок муфт
1.8 Змазування передач
2. МЕТРОЛОГІЧНА ПІДГОТОВКА ВИРОБНИЦТВА
2.1 Технічний опис складальної одиниці
2.2 Початкові дані
2.3 Технічні вимоги до складальної одиниці
2.4 Розмірний аналіз складальної одиниці
2.5 Розрахунок розмірів калібрів для гладкого циліндричного з'єднання
3. ТЕХНОЛОГІЧНА ПІДГОТОВКА ВИРОБНИЦТВА
3.1 Анализ технологичности конструкции детали
3.2 Визначення типу виробництва
3.3 Вибір способу отримання заготівки
3.4 Вибір маршруту обробки деталі
3.5 Розрахунок припусків на обробку деталі
3.6 Вибір ріжучого інструменту
3.7 Вибір металорізальних верстат
3.8 Розрахунок режимів різання
3.9 Розробка управляючої програми
3.10 Аналіз розмірного ланцюга
3.11 Нормування технологічного процесу
3.12 Економічне зрівняння технологічного процесу
4. ІНЖЕНЕРНІЙ АНАЛІЗ ОБ'ЄКТУ ВИРОБНИЦТВА
4.1 Опис об'єкту моделювання
4.2 Розробка структурної схеми об'єкту
4.3 Обгрунтування допущень, прийнятих в системі
4.4 Розробка фізичної і математичної моделі об'єкту
4.5 Розробка схеми моделі в Simulink
ВИСНОВКИ
ПЕРЕЛІК ВИКОРИСТАНИХ ДЖЕРЕЛ
Рівень розвитку машинобудування – один з найзначніших чинників технічного прогресу, оскільки корінні перетворення в будь-якій сфері виробництва можливі лише в результаті створення досконаліших машин і розробки принципово нових технологій. Розвиток і вдосконалення технології виробництва сьогодні тісно пов'язані з автоматизацією, створенням робототехнічних комплексів, широким використанням обчислювальної техніки, вживанням устаткування з числовим програмним управлінням. Функціонування цієї системи забезпечується за допомогою сучасних САПР, тісно пов’язаних одна з одною - взаємодія CAD-,CAM- та CAE-систем.
В умовах сучасного виробництво виникає завдання понизити терміни і витрати на виготовлення продукції. Причому зниження тривалості і витрат виробництва повинне здійснюватися не лише на етапі виготовлення, але і значною мірою на етапі проектування і розробки технічної документації. Це можна здійснити з використанням сучасних САПР. У даній бакалаврській роботі підготовка технічної документації здійснювалася за допомогою пакетів програм компанії АСКОН – САПР "ВЕРТИКАЛЬ" і "КОМПАС 3d". Використання даного інструменту дозволяє сучасному інженерові скоротити етап підготовки виробництва у декілька разів.
Комп’ютерна технологія покликана не тільки автоматизувати традиційно існуючі технологічні ланки, а принципово змінити саму технологію проектування та виробництва продукції на основі настроюваних багатоваріантних систем прийняття технічних рішень. Тільки в цьому випадку можна очікувати скорочення строків створення виробів, зниження витрат на весь життєвий цикл виробу, покращення якості виробів.
При створенні високотехнологічних виробів, в основі організації комп’ютерної технології знаходиться створення повної електронної моделі виробу на основі створення тримірних електронних моделей, це відкриває ширші можливості для створення більш якісної продукції та в більш стислі строки. Основою цієї системи є електрона модель підготовки виробництва, яка включає до свого складу 3D-моделі виробу, збірних одиниць та окремих деталей, усі необхідні креслення з технічними вимогами, необхідний комплект технологічної документації, а також засоби метрологічного контролю.
Якість виготовляємої продукції істотно підвищується лише при використанні єдиного підходу проектування підготовки виробництва, а саме поєднання конструкторської і технологічної частин проектування. У сучасних умовах проектування даний підхід стає максимально здійсненним завдяки створенню та використанню CAD, CAM і CAE систем, що дозволяє повністю автоматизувати процес проектування, істотно підвищує продуктивність праці, а також знижує собівартість продукції.
1. КОНСТРУКТОРСЬКА ПІДГОТОВКА ВИРОБНИЦТВА
Вихідні дані для підготовки виробництва триступінчатого редуктора представимо у вигляді таблиці.
Таблиця 1.1. Вихідні дані для підготовки виробництва триступінчатого редуктора
| Окружна сила на виході, кН | 5 |
| Швидкість,м/с | 0,63 |
| Шаг зірочки, мм | 160 |
| Число зубців зірочки | 8 |
| Строк служби, рік | 10 |
| Добова тривалість роботи, зміна | 3 |
| Коефіцієнт використання привода за зміну | 0,6 |
| Тип виробництва | одиничне |
Вибір розрахункового навантаження буде виконуватися за допомогою діаграми навантаження, представленій на рисунку 1.1.
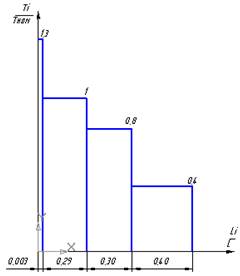
Рисунок 1.1. Діаграма навантаження редуктора
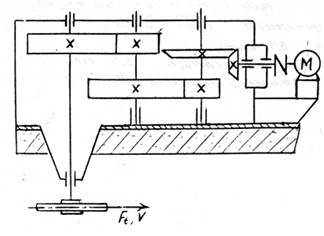
Рисунок 1.2. Схема привода
1.1 Визначення вихідних даних до розрахунку редуктора1.1.1 Вибір і перевірка електродвигуна
Розраховуємо необхідні дані для вибору електродвигуна.
Потужність електродвигуна на виході:
![]() (1.1)
(1.1)
![]()
Необхідна потужність електродвигуна:
 , (1.2)
, (1.2)
де ![]() – коефіцієнт корисної дії привода.
– коефіцієнт корисної дії привода.
![]() (1.3)
(1.3)
де ![]() – к. к. д. муфти,
– к. к. д. муфти, ![]() ;
;
![]() – к. к. д. ущільнення,
– к. к. д. ущільнення, ![]() ;
;
![]() – к. к. д. пари підшипників,
– к. к. д. пари підшипників, ![]() ;
;
![]() – к. к. д. конічної передачі,
– к. к. д. конічної передачі, ![]() ;
;
![]() – к. к. д. циліндрової передачі.
– к. к. д. циліндрової передачі.
![]()
Необхідна потужність електродвигуна:
 .
.
Частота обертання вихідного валу:
![]() (1.4)
(1.4)
![]()
Визначимо ділильний діаметр зірочки:
 (1.5)
(1.5)
Частота обертання електродвигуна визначається по формулі:
![]() , (1.6)
, (1.6)
де ![]() – передавальне відношення
приводу;
– передавальне відношення
приводу; ![]() – частота обертання вихідного валу редуктора. Діапазон можливих
передавальних чисел приводу:
– частота обертання вихідного валу редуктора. Діапазон можливих
передавальних чисел приводу:
Визначуваний діапазон можливих частот обертання двигуна:
Вибираємо електродвигун [1].
Таблиця 1.2. Вибір електродвигуна
| Тип двигуна | Потужність, кВт | Частота обертання, об/хв |
Тпуск/Тном, Н۰м |
| 4A 100S2 У3 | 4,0 | 2880 | 2,0 |
| 4A 100L4 У3 | 1430 | 2,0 | |
| 4A 112MB6 У3 | 950 | 2,0 | |
| 4A 132S8 У3 | 720 | 1,8 |
Приймаємо асинхронний електродвигун серії 4А з короткозамкнутим ротором – 4A 100S2 У3 з кріпленням на лапках.
Схему електродвигуна покажемо на рисунку 1.3.
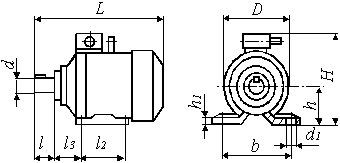
Рисунок 1.3. Електродвигун 4А160М4У3
Таблиця 1.3. Розміри електродвигуна 4А160М4У3
| Серія і типорозмір |
Габаритні розміри, мм |
Установочні та приєднувальні розміри, мм |
|||||||||
| L | H | D |
l1 |
l2 |
l3 |
d |
d1 |
b | h |
h1 |
|
| 4A 100S2 У3 | 365 | 265 | 235 | 60 | 112 | 63 | 28 | 12 | 160 | 100 | 12 |
Перевіримо умову можливості запуску електродвигуна під навантаженням:
 ;
;
3,78۰1,3 4۰2;
4,914<8.
Умова виконується, тобто даний електродвигун можна використовувати з даним редуктором.
1.1.2 Розрахунок загального і поодиноких передатних відношень редуктора
Визначимо загальне передатне число редуктора:
 (1.7)
(1.7)
Приймаємо
![]()
Передатне число редуктора:
1.1.3 Розрахунок частот обертання, потужностей і обертальних моментів на валах
Визначимо частоти обертання валів:
![]() ;
;
 ;
;
 ;
;
Визначимо потужність на валах редуктора:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Визначимо кутові швидкості зубчатих коліс і шестерень по формулі:
![]() ; (1.8)
; (1.8)
![]() ;
;
 ;
;
 ;
;
Обертальний момент визначимо по формулі:
 ; (1.9)
; (1.9)
 ;
;
 ;
;
1.1.4 Вибір розрахункового навантаження
Визначаємо загальний час роботи редуктора приводу по формулі:
![]() , (1.10)
, (1.10)
де ![]() – час роботи редуктора,
– час роботи редуктора, ![]() =10 років;
=10 років; ![]() – число робочих днів в році, nр.д=300;
– число робочих днів в році, nр.д=300; ![]() – число змін,
– число змін, ![]() =3;
=3; ![]() – тривалість зміни,
– тривалість зміни, ![]() =8;
=8; ![]() – коефіцієнт використання приводу,
– коефіцієнт використання приводу, ![]() =0,6.
=0,6.
![]() .
.
Визначимо число циклів навантаження на всіх ступенях редуктора:
 , (1.11)
, (1.11)
де ![]() – число циклів вантаження
на всіх ступенях редуктора.
– число циклів вантаження
на всіх ступенях редуктора.
![]() ;
;
 ;
;
 ;
;
 .
.
Оскільки число навантажень на кожному ступені 1,2 3 і 4 валів перевищує значення, то розрахунок ведемо по першому ступеню діаграми.
Визначимо номінальний момент на валах:
![]() ; (1.12)
; (1.12)
![]()
![]() ;
;
![]() ;
;![]()
Результати розрахунку початкових даних представимо у вигляді таблиці.
Таблиця 1.4. Кінематичні і силові параметри редуктора
| № вала | n, об/хв | w, 1/c | P, кВт | Т, кН۰м |
Тн, кН۰м |
| 1 | 2880 | 301,44 | 3,518 | 0,0117 | 0,0152 |
| 2 | 576 | 60,288 | 3,344 | 0,0555 | 0,0722 |
| 3 | 91,428 | 9,569 | 3,244 | 0,339 | 0,441 |
| 4 | 29,025 | 3,038 | 3,147 | 1,0359 | 1,347 |
Початковими даними для проектування є:
- обертальний момент на валу колеса, Т2=0,0722 кН·м;
- частота обертання шестерні, n1=2880 об/хв;
- передатне число u1-2=5.
1.2.1 Вибір матеріалів для виготовлення колеса і шестерні
Для нежорстких умов до габаритів передачі вибираємо [2]:
Термообробка: поліпшення;
Твердість поверхні зуба шестерні: HB360.380;
Твердість поверхні зуба колеса: HB300.340;
Матеріал зубів шестерні і колеса – сталь 45 [11];
Механічні властивості матеріалів: sНlim = 670Мпа; sFlim = 590 Мпа.
1.2.2 Приблизне визначення граничних та допустних напруг для матеріалів конічної передачі
Допустна напруга при проектувальному розрахунку на витривалість зубів при вигині визначається по формулі:
![]() , (1.13)
, (1.13)
де ![]() – гранична напруга зубів
передач на витривалість.
– гранична напруга зубів
передач на витривалість.
![]() ;
;
![]() .
.
Допустна напруга при проектувальному розрахунку на контактну витривалість визначається по формулі:
 , (1.14)
, (1.14)
де ![]() – коефіцієнт запасу
міцності для зубчатих коліс з однорідною структурою схильних до поліпшення.
– коефіцієнт запасу
міцності для зубчатих коліс з однорідною структурою схильних до поліпшення.
 ;
;
 .
.
1.2.3 Наближений проектувальний розрахунок головного і основних параметрів передач з умови забезпечення контактної міцності зубів
Діаметр зовнішнього ділильного кола колеса (на додатковому конусі)
 , (1.15)
, (1.15)
де ![]() - коефіцієнт, що враховує знижену здатність навантаження конічних
передач в порівнянні з циліндричними;
- коефіцієнт, що враховує знижену здатність навантаження конічних
передач в порівнянні з циліндричними;
![]() = 1,2+0,2u – для кривозубих коліс.
= 1,2+0,2u – для кривозубих коліс.
![]() .
.
![]() приймаємо рівним 1;
приймаємо рівним 1; ![]() - коефіцієнт ширини зубчатого вінця по зовнішній конусній відстані
[2];
- коефіцієнт ширини зубчатого вінця по зовнішній конусній відстані
[2];
![]() - коефіцієнт навантаження
приймаємо рівним 1,3.
- коефіцієнт навантаження
приймаємо рівним 1,3.
 ;
;
Визначення зовнішньої конусної відстані:
 .
.
Вибираємо числа зубів шестерні .
Числа зубів колеса визначимо по формулі:
![]() ,
,
де ![]() – число зубів колеса;
– число зубів колеса;
![]() – число зубів шестерні;
– число зубів шестерні;
![]() – передатне відношення передачі.
– передатне відношення передачі.
![]() .
.
Визначимо основні розміри коліс передач:
Діаметр ділильного кола:
Шестерні:
![]() .
.
Колеса:
![]() .
.
Діаметр окружністі впадин:
Шестерні:
![]() .
.
Колеса:
![]()
Фактичний середній модуль:
![]() .
.
Діаметр кола виступів:
Шестерні:
![]() .
.
Колеса:
![]() .
.
Кути ділильних конусів:
Шестерні:
![]() .
.
Колеса:
![]() .
.
Міжосьова відстань:
![]() .
.
Середня конусна відстань:
![]() .
.
Ширина зубчатого вінця:
![]() ,
,
приймаємо
![]() .
.
 .
.
Кут нахилу кругових зубів:
1.3.1 Наближений проектувальний розрахунок головного і основних параметрів передач з умови забезпечення контактної міцності зубів
Розрахунок передачі №2 і №3 представимо у вигляді таблиці.
Таблиця 1.5. Результати проектувального розрахунку головного і основних параметрів передач №2 і №3
| Передача №2 | Передача №3 | |
| 1 | 2 | 3 |
| Розрахункова міжосьова відстань, мм | 198,117 | 231,794 |
| Закруглена міжосьова відстань, мм | 200 | 250 |
| Модуль, мм | 3 | 5 |
| Сумарне число зубців | 131 | 100 |
| Число зубів шестерні/колеса | 18/113 | 24/76 |
| Фактичне передатне число передачі | 6,28 | 3,17 |
| Погрішність отриманого передатного числа передачі, % | 0,3 | 0,6 |
| Фактичний кут нахилу зубів, град | 10,73 | - |
| Діаметр ділильної окружності шестерні/колеса | 54,96/345,04 | 120/380 |
| Діаметр окружності впадин шестерні/колеса | 47,46/337,53 | 107,5/367,5 |
| Діаметр окружності виступів шестерні/колеса | 60,96/351,03 | 130/390 |
| Ширина зубчатого вінця шестерні/колеса | 70/60 | 110/100 |
.
1.3.2 Перевірочний розрахунок конічної зубчатої передачі
Призначимо ступінь точності виготовлення зубчатих передач залежно від окружної швидкості:
 ; (1.16)
; (1.16)
![]() .
.
Приймаємо середній "8" ступінь точності і "6" клас шорсткості.
Уточнення розрахункового навантаження.
Додаткові навантаження враховуються коефіцієнтом навантаження при розрахунку на втому вигину і - при розрахунку на контактну втому.
Перевірочний розрахунок фактичної згинальної напруги.
Перевірка міцності полягає у визначенні фактичної контактної і вигинистої напруги і в порівнянні їх з тими, що допускаються. Значення всіх коефіцієнтів [2].
Фактична напруга вигину в небезпечних перерізах підстави зубів шестерень визначає по формулі:



![]()
![]()
Фактична напруга вигину в небезпечному перерізу зуба колеса визначаєтья по формулі:

Величина окружного зусилля розраховується так:
Перевірочний розрахунок фактичної контактної напруги.
Фактичні контактні напруження на робочих поверхнях зубів визначають по формулі [2]:
 , (1.17)
, (1.17)
де ![]() – коефіцієнт навантаження.
– коефіцієнт навантаження.
 .
.
Визначення граничної допустної напруги матеріалу коліс.
Допустна напруга при перевірочному розрахунку на вигинисту витривалість визначає по формулі [2]:
 , (1.18)
, (1.18)
де ![]() – коефіцієнт запасу
міцності (при ХТО–загартування поліпшенням);
– коефіцієнт запасу
міцності (при ХТО–загартування поліпшенням);
![]() – коефіцієнт довговічності, що враховує зміну ;
– коефіцієнт довговічності, що враховує зміну ;
![]() – коефіцієнт, що враховує вплив шорсткості перехідної поверхні
зубів ;
– коефіцієнт, що враховує вплив шорсткості перехідної поверхні
зубів ;
![]() – коефіцієнт, що враховує чутливість матеріалу до концентрації
напруги;
– коефіцієнт, що враховує чутливість матеріалу до концентрації
напруги;
![]() – коефіцієнт, що враховує розмір зубчатого колеса.
– коефіцієнт, що враховує розмір зубчатого колеса.
![]() ;
;
![]() ;
;
 ;
;
![]() ; (1.19)
; (1.19)
![]() .
.
Базове
число циклів ![]() .
.
Оскільки
![]() , то
, то ![]() .
.
Підставивши набутих значень у формулу отримаємо:
 .
.
Допустна напруга при перевірочному розрахунку на контактну витривалість.
Допустна напруга при перевірочному розрахунку на контактну витривалість визначається по формулі [1.20] :
 , (1.20)
, (1.20)
де ![]() – коефіцієнт
довговічності, що враховує зміну.
– коефіцієнт
довговічності, що враховує зміну.
 ;
;
![]() ; (1.21)
; (1.21)
![]() .
.
Базове
число циклів ![]() .
.
Оскільки
![]() , то
, то ![]() .
.
![]() ,
,
де ![]() – коефіцієнт, що враховує
вплив початкової шорсткості;
– коефіцієнт, що враховує
вплив початкової шорсткості;
![]() – коефіцієнт, що враховує вплив окружної швидкості;
– коефіцієнт, що враховує вплив окружної швидкості;
![]() – коефіцієнт, що враховує розміри зубчатого колеса.
– коефіцієнт, що враховує розміри зубчатого колеса.
Підставивши набутих значень у формулу 1.20 отримаємо:
 .
.
1.3.3 Перевірочний розрахунок циліндричних зубчатих передач
Результати перевірочного розрахунку занесемо в таблицю 1.3.2
Таблиця 1.6. Результати перевірочного розрахунку передач №2 і №3
| Передача №2 | Передача №3 | |
| Окружна швидкість, м/с | 1,66 | 0,57 |
| Ступінь складності | 9 | 9 |
| Окружне зусилля, Н | 2627 | 7350 |
| Фактична напруга вигину в небезпечних перетинах підстави зубі шестерні/колеса, Мпа | 46,67/45,14 | 82,02/85 |
| Фактична контактна напруга на робочих поверхнях зубів, Мпа | 376 | 486 |
| Допустна напруга шестерні на вигинисту витривалість/колеса, Мпа | 362/349 | 345/334 |
| Допустна напруга на контактну витривалість, Мпа | 536 | 536 |
З розрахунків видно, що фактична напруга менше допустних.
![]() <
< ![]() ;
;
![]() <
< ![]() ;
;
![]() <
< ![]() ;
;
![]() <
< ![]() ;
;
![]() <
< ![]() ;
;
![]() <
< ![]() .
.
1.4 Конструювання зубчатих коліс
Конструктивна форма коліс залежить від їх розмірів, матеріалу, а також від технології отримання заготівки і механічної обробки.
Спочатку розрахуємо діаметри валів [2]:
![]() ; (1.22)
; (1.22)
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Заздалегідь
обчислений діаметр валу округлятимемо до найближчого стандартного по [12]: ![]() (для з'єднання з валом
електродвигуна);
(для з'єднання з валом
електродвигуна);![]() ;
; ![]() ;
; ![]() .
.
Визначимо розміри конструктивних елементів дискових коліс [2].
Колесо 2(конічне):
![]()
![]()
![]()
приймаємо стандартне значення с=10 мм;
![]()
приймаємо
стандартне значення ![]() =210 мм;
=210 мм;
S=1,1 8,25 = 9,08 мм,
приймаємо стандартнe значення S=9 мм;
![]()
приймаємо
стандартнe значення ![]()
![]()
приймаємо
![]()
![]()
приймаємо
cтандартнe значення ![]()
![]()
приймаємо
стандартнe значення ![]()
![]()
R=6 мм .
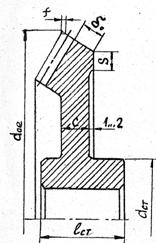
Рисунок 1.4. Параметри конічного колеса
Колесо 4:
![]()
![]()
приймаємо
![]()
![]()
![]() ,
,
приймаємо
![]()
![]()
приймаємо
стандартне значення ![]()
![]() ,
,
приймаємо
стандартне значення ![]() ;
;
![]() ;
;
![]() R=6 мм.
R=6 мм.
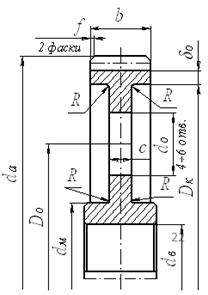
Рисунок 1.5. Параметри циліндричного колеса
Колесо 6:
![]()
![]()
приймаємо
![]()
![]() ,
,
приймаємо
![]()
![]() ,
,
приймаємо
![]()
![]()
приймаємо
стандартне значення ![]()
![]() ,
,
приймаємо
стандартне значення ![]()
![]()
![]() .
.
1.5.1 Проектний розрахунок валу
Цей розрахунок виконується для попереднього визначення діаметру валу. Діаметр розрахункового перетину валу визначуваний по формулі 1.23:
 , (1.23)
, (1.23)
де ![]() – напруга кручення, що
допускається .
– напруга кручення, що
допускається .
 ;
; ;
;
 ;
; .
.
По
[12] приймаємо: ![]() ( з урахуванням
з'єднання з електродвигуном);
( з урахуванням
з'єднання з електродвигуном); ![]() ;
;![]() ;
; ![]() .
.
1.5.2 Визначення навантажень, що діють на вал
Основними навантаженнями, що діють на вал, є зусилля в зубчатих зачепленнях, а також крутильні моменти. Визначимо сили, що діють в передачах.
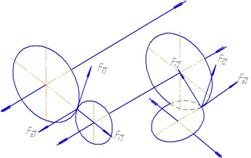
Рисунок 1.6. Схема приложения сил к промежуточному валу со стороны зубчатых передач
- окружна сила :

 ;
;
- радіальна сила:
 ;
;
- осьова сила:
 .
.
Знайдемо реакції опор у вертикальній плоскості:
Знайдемо реакції опор в горизонтальній плоскості:
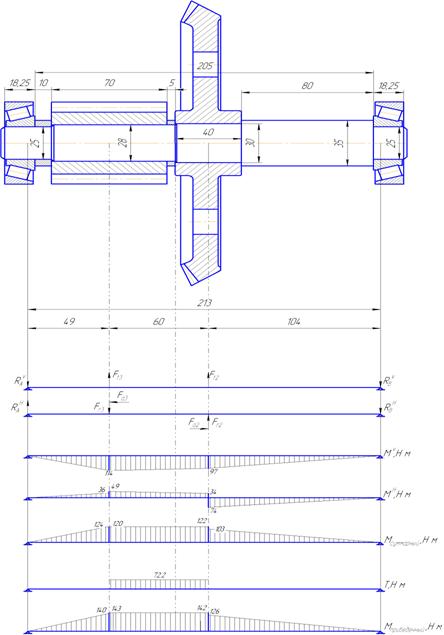
Рисунок 1.7. Розрахункова схема і епюри крутильних моментів
Сумарні моменти:
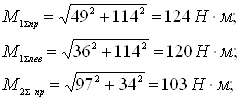
![]()
Сумарні реакції:
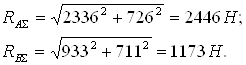
1.5.3 Наближений розрахунок валу
Перший небезпечний перетин прийнятий під шестернею, оскільки там концентратор напруги – паз шпони.
Другий небезпечний перетин прийнятий на перепаді діаметрів між колесом і шестернею.
Третій небезпечний перетин прийнятий під колесом, оскільки там концентратор напруги паз шпони. Згідно з [3]:


Еквівалентна напруга [3]:
 <
<![]()


Напруги для матеріалу валу з сталі 40:
Оскільки умови виконуються, то можна вважати, що міцність валу достатня.
1.6 Проектування вузлів підшипників кочення1.6.1 Вибір підшипників кочення
При виборі підшипників кочення виходять з конкретних умов експлуатації редуктора.
Для валу 1 приймаємо підшипники роликові радіально-упорні 7305.
Для валу 2 приймаємо підшипники роликові радіально- упорні 7305.
Для валу 3 приймаємо підшипники роликові радіально- упорні 7309.
Для валу 3 приймаємо підшипники роликові радіально- упорні 7312.
Таблиця 1.7. Характеристики підшипників
|
№ валу |
Визнач. Підшип. |
|
|
|
|
| 1,2 | 7305 | 25 | 62 | 18,25 | 29,6 |
| 3 | 7309 | 45 | 100 | 27,25 | 76,1 |
| 4 | 7312 | 60 | 130 | 33,5 | 118 |
1.6.2 Розрахунок підшипників кочення
Для вибраного підшипника кочення 7305 визначимо по каталогу величини динамічною С і статичній вантажопідйомності Со, а також користуючись ескізом вантаження опор валу визначимо довговічність підшипника
![]()
Визначимо приведене навантаження на підшипник:
![]() , (1.24)
, (1.24)
де ![]() – радіальне навантаження
на підшипник;
– радіальне навантаження
на підшипник;
![]() – коефіцієнти приведення ;
– коефіцієнти приведення ;
![]() – коефіцієнт кільця ;
– коефіцієнт кільця ;
![]() – коефіцієнт безпеки ;
– коефіцієнт безпеки ;
![]() – температурний коефіцієнт .
– температурний коефіцієнт .
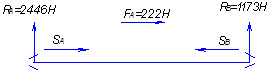
Рисунок 1.5. Схема вантаження опор валу осьовими силами
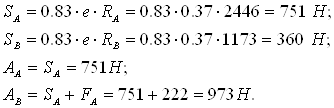
Опора A:
Опора В:
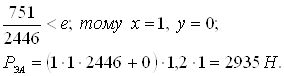
Розраховуємо довговічність більш навантаженого підшипника:

де ![]() – динамічне еквівалентне
навантаження;
– динамічне еквівалентне
навантаження;
![]() – частота обертання кільця;
– частота обертання кільця;
![]() – необхідна довговічність;
– необхідна довговічність;
![]() – величина, залежна від форми кривої втоми.
– величина, залежна від форми кривої втоми.
Оскільки фактична довговічність підшипника перевищує раніше розраховане значення 43200 годин, то даний підшипник підходить для роботи на вихідному валу.
Змащувальний матеріал: масло індустріальне 40А [13] (розбризкуванням з ванни редуктора).
1.7 Вибір і розрахунок муфт
Муфти є вузлами, що часто визначають надійність і довговічність всієї машини. На вході редуктора використовуємо сполучну муфту пружню втулково – пальцеву, яка служить для з'єднання вхідного валу редуктора з валом електродвигуна [4]. Муфта типу МУВП.
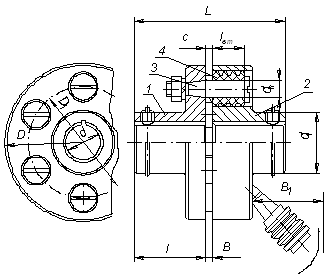
Рисунок 1.6. Муфта пружна втулково-пальцева
Вибираємо
муфту по розрахунковому моменту ![]() Нм,
діаметрам кінців валів, які з'єднуються
Нм,
діаметрам кінців валів, які з'єднуються ![]() мм.
мм.
Матеріал муфти: сталь 35 [11], пальців сталь 45 [11], втулки – спеціальна гума.
На рисунку 1.6 зображена пружна втулково-пальцева муфта. Її розміри приведені в таблиці 1.8.
Таблиця 1.8. Параметри муфти пружній втулково-пальцевій [14]
| [T], Нм | Параметр, мм | Кількість пальців | Маса, кг | |||||||||
| d | D |
D1 |
L | l |
d1 |
dn |
lвт |
c |
В1 |
|||
| 125 | 28 | 120 | 84 | 89 | 42 | 50 | 14 | 15 | 5 | 42 | 4 | 4,13 |
Перевірочний розрахунок пальців на вигин:
 , (1.25)
, (1.25)
де ![]() - розрахунковий момент,
Нмм;
- розрахунковий момент,
Нмм;
![]() - діаметр кільця розташування центрів пальців, мм;
- діаметр кільця розташування центрів пальців, мм;
![]() - товщина втулки розпору, мм;
- товщина втулки розпору, мм;
![]() - довжина пружної втулки, мм;
- довжина пружної втулки, мм;
![]() - діаметр пальців, мм;
- діаметр пальців, мм;
![]() - кількість пальців;
- кількість пальців;
![]() - напруга, що допускається, при вигині пальців.
- напруга, що допускається, при вигині пальців.
![]()
![]() Мпа – межа текучості матеріалу пальців;
Мпа – межа текучості матеріалу пальців;
![]() Мпа.
Мпа.
![]() Мпа.
Мпа.
Перевірочний розрахунок пальців на зминання:
![]()
![]() Мпа.
Мпа.
1.8 Змазування передач
У даному редукторі проектується система картера мастила. У корпус редуктора масло заливається так, щоб вінець другої передачі був залитий на 0.5b.
При цьому максимальний об'єм масла, що заливається в редуктор
![]() (1.26)
(1.26)
де B – внутрішня ширина редуктора; B = 270 мм;
L – внутрішня довжина редуктора; L =770 мм;
hmax – максимальна висота масла в корпусі; hmax =53мм.
![]()
Мінімальний об'єм масла, що заливається в редуктор:
![]() (1.27)
(1.27)
де hmin – мінімальна висота масла в корпусі;
hmin = 28.
![]() .
.
Рекомендується, що на 1 кВт передаваній редуктором потужності повинне доводитися приблизно 0,5 л масла.
![]() літрів.
літрів.
В'язкість
масла визначають залежно від контактної напруги і окружної швидкості коліс.
Окружна швидкість V=6,782, ![]() м/с . Виходячи з цього
в'язкість масла приймаємо рівною 22۰10-6м2/c згідно з [13] вибираємо
індустріальне масло І-20А.
м/с . Виходячи з цього
в'язкість масла приймаємо рівною 22۰10-6м2/c згідно з [13] вибираємо
індустріальне масло І-20А.
Змазування підшипників проводиться в редукторі тим же маслом, яким змащуються і зубчаті передачі. При мастилі картера коліс підшипники кочення змащуються бризками масла.
2. МЕТРОЛОГІЧНА ПІДГОТОВКА ВИРОБНИЦТВА
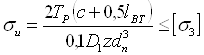
2.1 Технічний опис складальної одиниціПроміжний вал поз. 1 складальної одиниці (рис.2.1) призначений для передачі моменту до третього валу редуктора. Передача обертання здійснюється через циліндрову косозубу передачу вал - зубчате колесо (поз.2).
Шестерня (поз.3) виготовляється знімною.
Опори валу — роликопідшипники радіально-упорні № 7305 0-го класу точності навантажені радіальним і осьовим навантаженням.
Збірка валу проводиться в наступній послідовності: на вал надягає конічне зубчате колесо (поз.2), потім дистанційне кільце (поз.4), косозуба шестерня (поз.3), дистанційне кільце (поз.5). Після чого по черзі напресовуються підшипники (поз.6 і 7). Після цього вал встановлюється в редуктор з регулюванням осьової гри за допомогою набору прокладок привертними кришками (поз.8 і 9).
Рисунок 2.1. Складальна одиниця (проміжний вал редуктора)
2.2 Початкові даніТип виробництва – одиничний;
Передаванний критильний момент – 0,0722·103 Н۰м;
Частота обертання вала n =576 об/хв;
Параметри шестерні: m n = 3 мм; z = 18 ; β = 10,730; d =54,96 мм; a w = 200 мм. Навантаження, які діють на підшипникові опори: RA = 2446 Н; RB = 1173 Н.
2.3 Технічні вимоги до складальної одиниціВизначаємо величину бічного зазору і призначаємо вид сполучення для шестерні (поз. 3). Для цього розраховуємо мінімальний необхідний бічний зазор в зубчатому зачепленні [4]:
Jn min ≥ ν + aw (α1۰Δt1 – α2۰Δt2 )·2 sinαw,
де ν – бічний зазор для розміщення шаруючи мастила;
aw – міжосьова відстань швидкохідній ступені.
Δt1, Δt2 – різниця між робочою температурою матеріалу зубчатого колеса і корпусу і стандартною нормальною температурою відповідно (Δt1= 60º-20º = 40ºС; Δt2 = 30º - 20º = 10ºС);
α1, α2 – коефіцієнти теплового лінійного розширення матеріалу зубчатого колеса і корпусу відповідно ( α1 = 12۰10-6 мм / ºС;ν = 0,01 ; mn = 0,01·3 = 0,030 мм = 30 мкм; α2 = 10۰10-6 мм/ºС);
α w – кут профілю початкового профілю зуба (α w = 20º );
Jn min ≥ 0,030 + 200 (12·10─6۰40 −10∙10−6۰10)∙2 sin20˚ = 0,082 мм = 82 мкм.
Призначаємо вид сполучення C, яке забезпечить мінімальний бічний зазор в зачепленні:
Jn min = 115 мкм > 82 мкм.
Граничне відхилення міжосьової відстані:
fa =
![]() мм =
мм = ![]() мкм.
мкм.
В процесі експлуатації зубчата передача повинна працювати плавно, без шуму.
Для нормальної роботи вузла необхідно забезпечити осьову гру – осьове переміщення підшипника з одного крайнього положення в інше. Приймаю осьову гру рівної 0,04.0,07 мм.
2.4 Розмірний аналіз складальної одиниціРозмірний аналіз складальної одиниці проводитимемо методом регулювання, при якому наказана точність початкового (що замикає) розміру досягається навмисною зміною (регулюванням) величини одного із заздалегідь вибраних составляючих розмірів, званого компенсатором. Для заданої складальної одиниці (рис. 2.2) роль компенсуючих розмірів виконують прокладки.
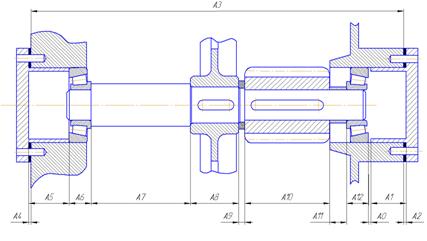
Рисунок 2.2. Складальний розмірний ланцюг
Для нормальної роботи роликових радіально-упорних
підшипників між кришкою і торцем підшипника необхідно забезпечити зазор для
компенсації теплового розширення валу. Величину зазору приймаю рівною А0
= 0,04…0,07 мм. На рисунку 2.2 представлена розмірний ланцюг з ланкою А0.
Ланки ![]() – збільшуючи,
– збільшуючи, ![]() - уменшаючи.
- уменшаючи.
Сума розмірів ланок є компенсатором. Номінальні розміри ланок ланцюга, їх характеристики, відхилення і допуски приведені в таблиці 2.1.
Таблиця 2.1. До розрахунку розмірного ланцюга методом регулювання
| Ланка | Номіналь-ний розмір, мм | Характер линки | Верхнє відхилення ЕS, мкм | Нижнє відхилення EI, мкм |
Допуск Т, мкм |
| 1 | 2 | 3 | 4 | 5 | 6 |
|
А1 |
29 | зменшуючє | +52 | 0 | 52 |
|
А2 |
2 | компенсатор | розраховується | ||
|
А3 |
308 | збільшуючє | 0 | - 130 | 130 |
|
А4 |
2 | компенсатор | розраховується | ||
|
А5 |
29 | зменшуючє | +52 | 0 | 52 |
|
А6 |
18.25 | зменшуючє | 0 | - 200 | 200 |
|
А7 |
88.5 | зменшуючє | 0 | - 87 | 87 |
|
А8 |
40 | зменшуючє | 0 | - 62 | 62 |
|
А9 |
5 | зменшуючє | 0 | - 30 | 30 |
|
А10 |
70 | зменшуючє | 0 | - 74 | 74 |
|
А11 |
14 | зменшуючє | 0 | - 43 | 43 |
|
А12 |
18.25 | зменшуючє | 0 | - 200 | 200 |
|
А0 |
0.07 | зменшуючє | 0 | - 30 | 30 |
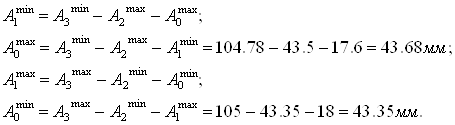
Визначуваний номінальний розмір компенсатора:
![]() (2.1)
(2.1)
![]()
Розподілимо номінальний розмір до: А2=2, А4=2,07мм. На виготовлення всіх розмірів (деталей) розмірного ланцюга призначаю допуски по 9 квалітету. Визначаємо величини допусків на виготовлення всіх деталей і проставимо граничні відхилення в тіло деталей, тобто по ходу обробки сполученних поверхонь. Ланки А6 і А8 є шириною кільця підшипника і допускного відхилення, його по [15] рівні: es = 0 мм; ei = -0,2 мм = - 200 мкм.
Сума допусків складових ланок:
![]()
Допуск замикаючої ланки: ![]()
Граничні відхилення компенсатора:
![]()
![]() ;
;
![]()
![]()
![]() ;
;
![]() .
.
Визначимо величину компенсації :
![]() (2.2)
(2.2)
![]()
Перевіряю розрахунок:
![]() .
.
Розраховую граничні розміри компенсатора:

Приймаю ![]()
![]() за постійні
прокладки.
за постійні
прокладки.
Кількість змінних прокладок:
Товщина змінних прокладок:
![]()
Через велику кількість отриманних прокладок, приймаємо стандартні прокладки 1 прокладки 0,9 мм, і 1 прокладка 0,03 мм.
Таким чином, в комплект входять постійні прокладки товщиною 2,0 мм 1,3 мм, 0,9 мм і 1 змінна прокладка товщиною 0,03 мм.
2.5 Розрахунок розмірів калібрів для гладкого циліндричного з'єднанняУ даній курсовій
роботі необхідно розрахувати калібр-пробку і калібр-скобу для отвору ![]() і для валу
і для валу ![]() .
.
Для розрахунку розмірів калібрів виберемо по [5] наступні дані:
– зсув поля допуску калібру всередину поля допуску деталі Z (Z1) і a (a1);
– допустимий вихід розміру зношеного калібру за межу поля допуску калібра-пробки Y і калібра-скоби Y1;
– допуск на виготовлення калібра-пробки H і калібру скоби H1;
– допуск на виготовлення контркалібру для пробки Hp|.
Граничні
розміри для отвору ![]() :
:
Dmax = D + ES = 25 + 0,021 = 25,021 мм;
Dmin = D + EI = 25 + 0 = 25 мм.
По [5] для IT7 і інтервалу розмірів 18…30 мм знаходимо дані для розрахунку калібрів Z = 0,003 мм; Y = 0,003 мм; (a= 0 мм; H = 0,004 мм. Формули для розрахунку розмірів калібрів по [5].
Граничні розміри прохідного нового калібра-пробки:
ПРmax = Dmin + Z + H / 2 = 25 + 0,003 + 0,004 / 2 = 25,005 мм;
ПРmin = Dmin + Z – H / 2 = 25 + 0,003 – 0,004 / 2 = 25,001 мм.
Виконавчий розмір калібра-пробки ПР 25,005–0,004.
Найменший розмір зношеного прохідного калібра-пробки:
ПРізн = Dmin – Y = 25 – 0,003 = 24,997 мм.
Коли калібр ПР матиме цей розмір, його потрібно вилучити з експлуатації.
Граничні розміри непрохідного нового калібра-пробки:
НЕmax = Dmax + H / 2 = 25,021 + 0,004 / 2 = 25,023 мм;
НЕmin = Dmax – H / 2 = 25,021 – 0,004 / 2 = 25,019 мм.
Виконавчий
розмір калібра-пробки НЕ 25,023–0,004. Граничні розміри для валу ![]() :
:
dmax = d + es = 25 + 0,041 = 25,041 мм;
dmin = d + ei = 25 + 0,028 = 25,028 мм.
По [5] для IT6 і інтервалу розмірів 18…30 мм знаходимо дані для розрахунку калібрів (a1 = 0 мм; Z1 = 0,003 мм; Y1=0,003 мм; Н1=0,004 мм; Нр=0,0015 мм. Формули для розрахунку розмірів калібрів по [5].
Граничні розміри прохідного нового калібра-скоби:
ПРmax = dmax – Z1 + H1 / 2 = 25,041 – 0,003 + 0,004 / 2 = 25,040 мм;
ПРmin = dmax – Z1 – H1 / 2 = 25,041 – 0,003 – 0,004 / 2 = 25,036 мм.
Виконавчий розмір калібра-скоби ПР 25,036+0,004.
Найбільший розмір зношеного прохідного калібра-скоби:
ПРізн = dmax + Y1 = 25,041 + 0,003 = 25,044 мм.
Коли калібр ПР матиме цей розмір, його потрібно вилучити з експлуатації. Граничні розміри непрохідного нового калібра-скоби:
НЕmax = dmin + H1 / 2 = 25,028 + 0,004 / 2 = 25,030 мм;
НЕmin = dmin – H1 / 2 = 25,028 – 0,004 / 2 = 25,026 мм.
Виконавчий розмір калібра-скобы НЕ 25,026+0,004. Граничні розміри прохідного контркалібру:
К–ПРmax = dmax – Z1 + Hp / 2 = 25,041 – 0,003 + 0,0015 / 2 = 25,03875 мм;
К–ПРmin = dmax – Z1 – Hp / 2 = 25,041 – 0,003 – 0,0015 / 2 = 25,03725 мм.
Виконавчий розмір контркалібру К–ПР 25,03725–0,0015. Граничні розміри контркалібру для контролю зносу:
К–Іmax = dmax + Y1 + Hp / 2 = 25,041 + 0,003 + 0,0015 / 2 = 25,04475 мм;
К–І min = dmax + Y1 – Hp / 2 = 25,041 + 0,003 – 0,0015 / 2 = 25,04325 мм.
Виконавчий розмір контркалібру К– ПР 25,03725–0,0015. Граничні розміри непрохідного контркалібру:
К–НЕmax = dmin + Hp / 2 = 25,028 + 0,0015 / 2 = 25,02875 мм;
К–НЕ min = dmin – Hp / 2 = 25,028 – 0,0015 / 2 = 25,02725 мм.
Виконавчий розмір контркалібру К– НЕ 25,02725–0,0015.
Таблиця 2.2. Розрахунок розмірів калібрів
| Найменування калібру | Граничні розміри, мм | Виконавчий розмір, мм | ||
| найбільший | найменший | зношений | ||
| Пробка | ||||
| ПР | 25,005 | 25,001 | 24,997 |
25,005–0,004 |
| НЕ | 25,023 | 25,019 | — |
25,023–0,004 |
| Скоба | ||||
| ПР | 25,040 | 25,036 | 50,044 |
25,036+0,004 |
| НЕ | 25,030 | 25,026 | — |
25,026+0,004 |
| Контркалібр | ||||
| К–ПР | 25,03875 | 25,03725 | — |
25,03725–0,0015 |
| К–НЕ | 25,02875 | 25,02725 | — |
25,02725–0,0015 |
| К–И | 25,04475 | 25,04325 | — |
25,04325–0,0015 |
Побудуємо схеми полів допусків на виготовлення калібра-пробки (рис. 2.3) і калібра-скоби (рис. 2.4)
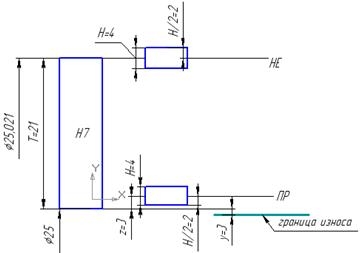
Рисунок 2.3. Схема полів допусків на виготовлення калібра-пробки
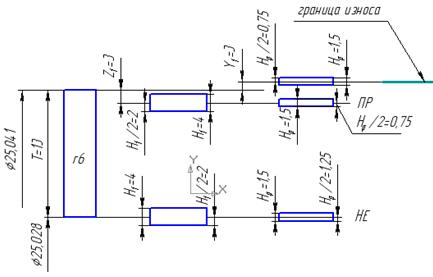
Рисунок 2.4. Схема полів допусків на виготовлення калібра-скоби
3. ТЕХНОЛОГІЧНА ПІДГОТОВКА ВИРОБНИЦТВА
3.1 Аналіз технологічності конструкції деталі
Досліджувана деталь - циліндрове прямозубе зубчате колесо. Матеріалом деталі є конструкційна вуглецева сталь 45 ГОСТ 1050-88. Дана сталь застосовна для вал-шестерен, колінчастих і розподільних валів, шестерень, шпінделів, бандажів, циліндрів, кулачків і інших нормалізованих, покращуваних і таких, що піддаються поверхневій термообробці деталей, від яких вимагається підвищена міцність. Хімічний склад стали, механічні, фізичні і технологічні властивості приведені таблицях нижче.
Таблиця 3.1. Хімічний склад сталі 45
| C,% | Si,% | Mn,% | Ni,% | S,% | P,% | Cr,% | Cu,% | As,% |
| 0.42 - 0.5 | 0.17 - 0.37 | 0.5 - 0.8 | до 0.25 | до 0.04 | до 0.035 | до 0.25 | до 0.25 | до 0.08 |
При проектуванні деталі витримані всі вимоги стандартів по ГОСТ 2.403-75.
Необхідна твердість (300…340 НВ) досягається поліпшенням.
При серійному виробництві доцільніше застосовувати штампування в прикладних штампах, що дозволяє конфігурація деталі.
Як конструкторська і технологічна бази при обробці зубів колеса прийнята циліндрова поверхня; як вимірна – вісь колеса. Це є нетехнологічним, оскільки порушується принцип єдності баз.
При виготовленні деталі використовується в основному стандартне технологічне оснащення.
На кресленні деталі є всі види, перетини і розрізи необхідні для того, щоб представити конструкцію деталі.
Замінити деталь збірним вузлом або армованою конструкцією представляється недоцільним.
Всі поверхні деталі доступні для обробки і вимірювань. Можливе використання високопродуктивного устаткування і стандартного технологічного оснащення.
Умови для урізування і виходу ріжучого інструменту забезпечені конструкцією деталі. Всі отвори деталі є крізними.
Нетехнологічних елементів конструкція деталі не має, а також не виникає труднощів при витримці заданих допусків на розміри і необхідної шорсткості. Величина радіального биття не повинна перевищувати 0,05мм|. Приймаються допуски на торцеве биття 0,06мм|. Допуск круглої і циліндричності центрального отвору складає 0,01мм|. При витримці цих вимог технологічних труднощів не виникає.
На центральному отворі колеса передбачені західні фаски, які полегшують його монтаж при виготовленні і збірку при застосуванні.
Найбільш точною поверхнею деталі є поверхня Ø71H7. Забезпечення цієї точності вимагає обробки абразивним інструментом. Точність отвору відповідає точності зубчатого вінця. Дана поверхня є базою, що робить деталь технологічною.
В цілому деталь є технологічною.
3.2 Визначення типу виробництваРозрахуємо такт випуску по відомих залежностях:
 , (3.1)
, (3.1)
де ![]() - річний дійсний фонд часу роботи устаткування;
- річний дійсний фонд часу роботи устаткування;
![]() - коефіцієнт, що враховує
втрати по організаційних причинах,
- коефіцієнт, що враховує
втрати по організаційних причинах, ![]() =0,75;
=0,75; ![]() - програма випуску деталей
за рік,
- програма випуску деталей
за рік, ![]() = 150 шт.
= 150 шт.
Fg=Fn (1-P/100),(3.2)
де Fn – номінальний річний фонд часу;
Р – величина простоїв устаткування по організаційно-технічних причинах. Приймаємо Р=10% .
Fn=(Дпр∙φпр+ Дφ)· с, (3.3)
де Дпр – число передсвяткових днів в році;
φпр - тривалість зміни в передсвяткові дні;
Дφ – число повних робочих днів в році;
Дпр – тривалість зміни в робочі дні;
с - кількість робочих змін.
При п’ятиденному робочому тижні (тривалістю 40 годин) загальна кількість робочих днів в 2009 році складає:
Np=366-114=252, (3.4)
114 - кількість неробочих і святкових днів.
Тоді, враховуючи число робочих змін с =2; тривалість зміни φпр =8 годин; тривалість зміни в передсвятковий день φпр=7 годин; кількість передсвяткових днів Дпр=6; кількість повних робочих днів Д=246, отримаємо:
Fn=(7·6 + 246·8 )·2 = 4020 год.;
Fg= 4020 (1-0,1)= 3618 год.;
![]() сер/шт.
сер/шт.
Визначимо коефіцієнт серійності по формулі:
Kl= , (3.5)
, (3.5)
де ![]() - середня величина штучного часу на механічну обробку.
- середня величина штучного часу на механічну обробку.
Kl=![]()
Тоді, тип виробництва – середньо серійний.
3.3 Вибір способу отримання заготівки
Метод отримання заготівки деталі, його доцільність і економічна ефективність визначається такими чинниками, як форма деталі, її матеріал, габаритні розміри деталі, річна програма випуску деталі. Виходячи з конструкції деталі, типу виробництва, заготівка може бути отримана одним з методів: литвом, куванням або штампуванням.
Оскільки матеріал заготівки – сталь 45 не є придатною для литва, то метод отримання заготівки з литва неприйнятний.
Слід зазначити що сталь 45 добре деформується. Тому виходячи з величини річної програми випуску деталей, особливості конструкції деталі одним з методів отримання заготівки вибираємо штампування в підкладних штампах. Штампування на ГКМ неприйнятне оскільки при даному способі виготовлення виникає необхідність покупки дорогого устаткування.
Обчислимо розрахункову масу поковки:
![]() кг,
кг,
де МД – маса деталі;
kp – коефіцієнт для орієнтовної розрахункової маси поковки.
Виходячи з конфігурацій заготівки визначуваний:
- Група стали – М1;
- Клас точності – Т4.
Для визначення ступеня складності поковки розрахуємо відношення маси поковки до маси простої геометричної фігури, в яку можна вписати деталь:
![]() ;
;
![]() .
.
Згідно графіку [1] отримуємо ИИ=13.
На підставі початкового індексу визначаємо допуски і припуски і складаємо таблицю.
Таблиця 3.2. Вибір припусків і допусків на оброблювані розміри
| Розміри деталі, мм | Допуск, мм | Припуск, мм | Розмір заготовки, мм |
| Ø 390 h11 |
+6 -6 |
16∙2 | Ø 422 |
| Ø 340 H14 |
+5 -5 |
21∙2 | Ø 298 |
| Ø 120 h14 |
+3 -3 |
11∙2 | Ø 142 |
| Ø 71 H7 |
+2 -2 |
9∙2 | Ø 53 |
| 100 h12 |
+2 -2 |
9 | 109 |
| 105 h11 |
+3 -3 |
10 | 115 |
| 18 h14 |
+2 -2 |
6 | 12 |
Визначимо масу заготівки по залежності:
G3= ρ· V· K ,(3.6)
де ρ=7810 - густина метала, кг/м3;
К - коефіцієнт, що враховує відходи металу;
V3- об'єм заготівки, який дорівнює сумі об'ємів заготівки.
G3=7810۰0,004۰1,1=34,4 кг.
Визначимо коефіцієнт використання металу по формулі:
![]() ,(3.7)
,(3.7)
де Gg- маса деталі.
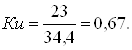
Технічні вимоги на заготівку: Штампувальні радіуси 4 мм, штампувальні ухили для зовнішніх поверхонь 7˚, для внутрішніх поверхонь 10˚, допустима величина зсуву частин штампів 1,4 мм, допустима величина залишкового облоя 1,6 мм.
Рисунок 3.1 – Ескіз заготівки поковки колеса
3.4 Вибір маршруту обробки деталіВраховуючи точність і якість поверхонь деталі розробимо маршрут їх обробки.
Таблиця 3.3. Маршрутна карта обробки зубчатого колеса
| № поверхні | Конструктів-ний розмір елементарної поверхні | Якість поверхневого шару | Технологічні переходи | Досягаємий рівень якості | ||
| Квалітет |
Шорсткість Rа,мкм |
Квалітет |
Шорсткість Rа,мкм |
|||
| 1,2 | 105h11 | 11 | 3,2 | Чистове точіння | 11 | 3,2 |
| Чорнове точіння | 12 | 6,3 | ||||
| 3 | Æ71Н7 | 7 | 1,6 | Чистове шліфування | 7 | 1,6 |
| Чорнове шліфування | 8 | 3.2 | ||||
| Чистове точіння | 10 | 6,3 | ||||
| Чорнове точіння | 12 | 12,5 | ||||
| 4 | 20Js9 | 9 | 3,2 | Протягування | 9 | 3,2 |
| 5 | 390h11 | 11 | 3,5 | Чорнове точіння | 12 | 6,3 |
| Чистове точіння | 11 | 3,2 | ||||
| 6 | Æ56H14 | 12 | 6,3 | Розсвердлю-вання ё | 14 | 12,5 |
| Розсвердлю-вання | ||||||
| Свердління | 12 | 6,3 | ||||
| 7,8 | 100h12 | 12 | 6,3 | Чорнове точіння | 12 | 6,3 |
| 9 | 100 | 9 | 3,2 | Однократне фрезерування | 9 | 3,2 |
Використовуючи результати розробки МОН, приведемо перелік операцій технологічного процесу в їх технологічній послідовності. Представимо його виді таблиці.
Таблиця 3.4. Операційна карта обробки зубчатого колеса
| № Опе-рації | Технологічна операція | Елементарна поверхня |
| 015 | Токарно- гвинторізна |
Точити поверхні 1,2,3 за програмою Точити поверхні 3,4,5 за програмою Точити поверхню 5 за програмою Розточити крізний отвір 6 за програмою Розточити крізний отвір 6 за програмою Точить фаски 7,8,9 за програмою |
| 020 | Токарно-револьверна |
Підрізати торець Æ390h11/Æ340Н14 Підрізати торець Æ120h14/Æ71Н7 начорно Підрізати торець Æ120h14/Æ71Н7 начисто Точить поверхню Æ120h14 Точить поверхню Æ390h11 начорно. Точить поверхню Æ390h11 начисто. Розточити поверхню Æ340Н14 Точити поверхню 18h14 Точити фаски 3х45°, 3,5х45°. |
| 025 | Радіально- свердлильна |
Свердлити 6 отворів Æ20 H14 Розсвердлити 6 отворів Æ40 H14 Розсвердлити 6 отворів Æ56 H14 |
| 030 |
Горізонтально- протяжна |
Протягнути плішковий паз B=20Js9 |
| 035 | Зубофрезерна | Фрезерувати 76 зубьев |
| 040 | Внутрішліфувальна |
Шліфувати поверхню Æ71Н7 начорно. Шліфувати поверхню Æ71Н7 начисто. |
3.5 Розрахунок припусків на обробку деталі
Припуск – шар матеріалу, який віддаляється з поверхні заготівки в цілях досягнення заданих властивостей оброблюваної поверхні деталі.
Проміжні допущення мають дуже важливе значення в процесі розробки технологічних операцій механічної обробки деталей. Правильне призначення допущень на обробку заготівки забезпечує економію матеріальних і трудових ресурсів, якість продукції, яка випускається, знижує собівартість виробів.
Визначення елементів припуску і заповнення розрахункової таблиці для діаметрального розміру O71Н7.
Етапи обробки поверхні:
1. Отримання заготівки куванням в підкладних штампах;
2. Чорнове розточування H12;
3. Чистове розточування H10;
4. Чорнове шліфування H8;
5. Чистове шліфування H7.
Таблиця 3.5. Величини нерівностей для різних видів обробки
|
|
h, мкм | |
| Заготовка |
|
- |
| Чорнове розточування | 125 | 120 |
| Чистове розточування | 40 | 40 |
| Чорнове шліфування | 15 | 15 |
Для заготівки сумарна похибка визначається по формулі:
![]() , (3.8)
, (3.8)
де ![]() - похибка жолоблення;
- похибка жолоблення; ![]() - похибка зсуву штампів.
- похибка зсуву штампів.
Згідно
[1]: ![]() мкм;
мкм; ![]() мкм.
мкм.
![]() мкм.
мкм.
Для подальших переходів сумарна похибка визначається по формулі:
![]() , (3.9)
, (3.9)
де ![]() - коефіцієнт уточнення.
- коефіцієнт уточнення.
Для
чорнового точіння: ![]() ;
;
Для
чистового точіння: ![]() ;
;
Для
чорнового шліфування: ![]() ;
;
Для
чистового шліфування: ![]()
![]() мкм;
мкм;
![]()
![]() ;
;
![]() мкм.
мкм.
Погрішність установки розраховується по формулі:
![]() , (3.10)
, (3.10)
де ![]() - погрішність базування;
- погрішність базування;
![]() - погрішність закріплення.
- погрішність закріплення.
При
установці в трикулачковому самоцентрующому патроні ![]()
Величину припуску для всіх переходів розраховуємо по формулі:
![]() ; (3.11)
; (3.11)

![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Дані розрахунків заносимо в таблицю.
Таблиця 3.6. Результати розрахунку припусків
| Этап | Квалітет | Елементи припуску,мкм | Допуск ,мм | Операційний розмiр, мм |
Розмір припуску мм |
|||||
|
Rz |
h |
∆E |
E | Розра-хунковий | Округл | max | min | |||
| Заг-ка | - | 1250 | 1868 | 0 | 4,0 | 71 | 71 | - | - | |
| Чор.роз. | H12 | 125 | 120 | 113 | 100 | 0,30 | 70,874 | 70,87 | 10,54 | 5,5 |
| Чист.роз | H10 | 40 | 40 | 11 | 100 | 0,12 | 70,61 | 70,6 | 1,21 | 0,81 |
| Чор.Шл. | H8 | 15 | 15 | 1 | 10 | 0,046 | 69,52 | 69,5 | 0,31 | 0,15 |
| Чис.Шл. | H7 | - | - | - | 10 | 0,030 | 59,28 | 62 | 0,156 | 0,084 |
Операцiйнi розмiри визначаються таким чином:
![]()
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
Розміри припуска розраховуються по наступних формулах:
![]() ; (3.12)
; (3.12)
![]() ; (3.13)
; (3.13)
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
Побудуємо схему розташування допусків і припусків для розмір внутрішнього отвору Ø71H7.
Для останніх поверхонь заготівки результати розрахунків заносимо в таблицю 3.5.3.
Таблиця 3.7. Результаті визначення операційних розмірів
|
Поверхня деталі |
Технологічні переходи по обробці поверхні |
Допуск Т, мкм |
Мінімальний припуск|2Zmin,мм |
Номінальний операційний розмір, мм |
|
| розрахунк. | округлений | ||||
| Ø 390 h11 | Чорнове точіння | 570 | 23,43 | 390 | 390 |
| Чистове точіння | 360 | 2,07 | 392,57 | 392,5 | |
| 100 h12 | Чорнове точіння | 350 | 7 | 100 | 100 |
| 105 h11 | Чорнове точіння | 350 | 5,6 | 106.45 | 106.41 |
| Чистове точіння | 220 | 1,15 | 105 | 105 | |
| 18 h14 | Чорнове точіння | 430 | 4 | 18 | 18 |
| 340 H14 | Чорнове точіння | 1400 | 37 | 340 | 340 |
| 120 h14 | Чорнове точіння | 870 | 19 | 120 | 120 |
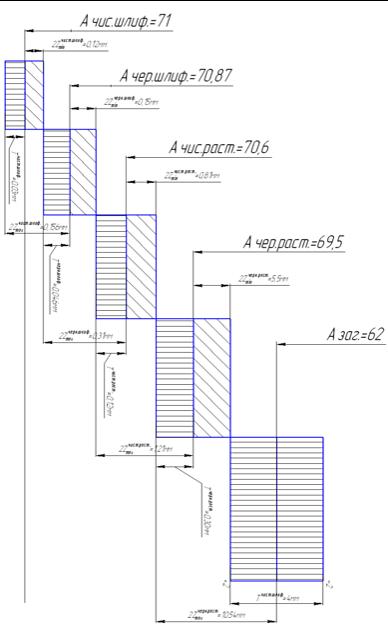
Рисунок 3.2. Схема розташування припусків і допусків для діаметрального розміру Ø71Н7
3.6 Вибір ріжучого інструменту
Видалення припуску із заготівки здійснюється за допомогою ріжучого інструменту. Згідно з [9] виберемо ріжучій інструмент. Результаті вибору ріжучого інструменту представлені в таблиці 3.6.1.
Таблиця 3.8. Результати вибору ріжучого інструменту
| Найменування | Ріжучий інструмент | Вимірювальний інструмент | |
| Операції | Перехід | ||
|
Токарно-гвинторізна з ЧПК |
Установ А | ||
| Точіння поверхні 14, 11, 7 за програмою | Різець контурний T5K10 2103-0714 ГОСТ 20872-80 | Штангенциркуль ШЦЦ-II-125-0,01 ГОСТ 166-89, шаблон спеціальний | |
| Точіння поверхні 1,10,14 за програмою | Різець контурний T5K10 2103-0714 ГОСТ 20872-80, Різець контурний T15K6 2103-0714 ГОСТ 20872-80, | Штангенциркуль ШЦЦ-II-125-0,01 ГОСТ 166-89, шаблон спеціальний | |
| Розточ. отв.3 за програмою | Різець розточ. 2140-0007 Т5К10 ГОСТ 2140-0027, Різець розточ. 2140-0007 Т15К6 ГОСТ 2140-0027 | Штангенциркуль ШЦЦ-II-125-0,01 ГОСТ 166-89, шаблон спеціальний | |
| Токарно-револьверна | Установ А | ||
| Підрізка торця 1 | Різець підріз.2112-0005 T5K10 ГОСТ 18880-73 | Штангенциркуль ШЦЦ-II-125-0,01 ГОСТ 166-89 | |
|
Підрізка торця 2 (начорно) |
Різець підріз.2112-0005 T5K10 ГОСТ 18880-73 | Штангенциркуль ШЦЦ- II-125-0,01 ГОСТ 166-89 | |
|
Підрізка торця 3 (начисто) |
Різець підріз.2112-0005 T15K6 ГОСТ 18880-73 | Штангенциркуль ШЦЦ- II-125-0,01 ГОСТ 166-89 | |
| Точіння поверхні. 4 | Різець прох.2103-0023 T5K10 ГОСТ 18879-73 | Штангенциркуль ШЦЦ- II-125-0,01 ГОСТ 166-89 | |
|
Точіння поверхні. 5 (начорно) |
Різець прох.01392 T5K10 ГОСТ 25395-82 | Штангенциркуль ШЦЦ-III-400-0,01 ГОСТ 166-89 | |
|
Точіння поверхні 6 (начисто) |
Різець прох.01392 T15K6 ГОСТ 25395-82 | Штангенциркуль ШЦЦ-III-400-0,01 ГОСТ 166-89 | |
| Точіння поверхні 7 | Різець прох.2103-0023 T5K10 ГОСТ 18879-73 | Штангенциркуль ШЦЦ- II-125-0,01 ГОСТ 166-89 | |
| Точіння поверхні 8 | Різець спеціальний | Штангенциркуль ШЦЦ- II-125-0,01 ГОСТ 166-89 | |
| Точіння фасок 3,5х45˚,3х45 | Різець фасоч.2136-0710 ГОСТ 18875-73 | Шаблон спеціальний | |
| Установ А | |||
| Свердління 6 отворів | Спіральне свердло Ø20, 2301-3032 Р6М5 ГОСТ 10903-77 | Штангенциркуль ШЦК-II-125-0,1 ГО | |
| Радіально - свердлильна | Установ А | ||
| Розсвердлювання 6 отворів | Спіральне свердло Ø56, 2301-0174 Р6М5 ГОСТ 10903-77 | Штангенциркуль ШЦК-II-125-0,1 ГО | |
| Горизонт. - протяжна | Установ А | ||
| Протягуван-ня плішкового гара | Протяжка 2405-1131 ГОСТ 18217-80 | Спеціальний | |
| Зубофрезерна | Установ А | ||
| Фрезерувати 76 зубів | Фреза 2510-4324 Р6М5 ГОСТ 9324-80 | Зубомір зсуву-2350-АВ Ту2-034-231-88; крокомір кроку зачеплення М1ГОСТ 3883-81; нормалемір М01-ав ГОСТ 7760-81) | |
| Внутришліф. | Установ А | ||
| Шліфув. отв.3 (начорно) | Круг 2720 – 0024 ГОСТ 16167 - 90 | Калибр – пробка 8133-0291 ГОСТ16780-71 | |
| Шліфув. отв.3 (начисто) | Круг 2720 – 0024 ГОСТ 16167 - 90 | Калибр – пробка 8133-0291 ГОСТ16780-71 | |
3.7 Вибір металорізальних верстат
Враховуючи кількість деталей в партії, тип виробництва і матеріал заготівки, для обробки зовнішніх циліндрових поверхонь можна використовувати верстати токарної групи.
Вибираємо токарно-револьверний верстат 1Г340. Токарно-револьверний верстат 1Г340 з горизонтальною віссю повороту револьверної головки призначено для високопродуктивної обробки в патроні сталевих виробів. Ріжучий інструмент з твердих сплавів, необхідний для обробки виробу, закріплюється у восьми позиціях револьверної головки і в одній позиції поворотної різцевої головки поперечного супорта.
Для обробки отворів застосовуються верстати свердлильної групи. Вибираємо радіально-свердлильний верстат 257 призначений для свердління в суцільному матеріалі, розсвердлювання, зенкерування, розгортання.
Для виконання зубофрезерної операції вибираю зубофрезерний верстат моделі 53А50.
Для обробки паза шпони вибираю верстат 7Б57.
Для досягнення необхідної точності отвору 3 застосовуємо внутрішліфувальний верстат моделі 3К228В|.
Результати вибору металообробних верстатів представлені в таблиці 3.7.1.
Таблиця 3.9. Результати вибору металорізальних верстат
| № п/п | Модель і призначення | Технічна характеристика | |
| 1. | Токарно – гвинторізний 16К30Ф3 | Макс. діаметр оброблюваної заготовки, мм: | |
| над станиною | 630 | ||
| над супортом | 320 | ||
| Макс. довжина оброблюваної заготовки | 320 мм. | ||
| Довжина розточування при обробці в патроні | 100 мм. | ||
| Частота обертання шпинделя | 6,3-1250 об/хв. | ||
| Число частот обертання шпинделя, об/хв | 24 | ||
| Число частот обертання шпинделя, перемикаємих за програмою, об/хв | 12 | ||
| Межі робочих подач супорта, мм/хв: | |||
| поздовжніх | 1-1200 | ||
| поперечних | 1-600 | ||
| Прискорені подачі супорта, мм/хв: | |||
| поздовжні | 4800 | ||
| поперечні | 2400 | ||
| Кількість інструментів | до 8 | ||
| Габарити станка, мм | 4360х2200х1600 | ||
| Маса без виносного устаткування, кг | 6300 | ||
| Маса з виносним устаткуванням, кг | 7400 | ||
| 2. | Горизонтально – протяжний 7Б57 | Габаритна довжина, мм | 9400 |
| Габаритна ширина, мм | 2500 | ||
| Габаритна висота, мм | 1910 | ||
| Потужність, кВт | 37 | ||
| Діаметр отвору в планшайбі, мм | 200 | ||
| Швидкість робочого ходу протяжки, м/мін | 1,0 – 6,15 | ||
| Швидкість зворотного ходу протяжки, що рекомендується, м/хв | 20 – 25 | ||
| Номінал тягової сили, кН | 400 | ||
| Найбільша довжина ходу санчат, мм | 2000 | ||
| Довжина робочої поверхні опорної плити, мм | 560 | ||
| Ширина робочої поверхні опорної плити, мм | 560 | ||
| Діаметр отвору в опорній плиті під планшайбу, мм | 250 | ||
| Маса верстата, кг | 13500 | ||
| 3 | Радіально-свердлильний 257 | Межі вильоту осі шпінделя від колони, мм | 500-2000 |
| Найбільший діаметр отвору,мм | 75 | ||
| Межі відстані від торця шпінделя до плити, мм | 600-1750 | ||
| Найбільше осьове переміщення шпинделя | 450 | ||
| Число скоростей обертання шпінделя | 22 | ||
| Потужність , кВт | 7 | ||
| Межа чисел оборотів шпінделя за хвилину | 11,2-1400 | ||
| 4 | Токарно – револьверний станок 1Г340 | Найбільший діаметр оброблюваної заготівки в патроні, мм | |
| Над станиною | 400 | ||
| Над поперечним супортом | 200 | ||
| Число позицій револьверної головки | 16 | ||
| Діаметр отвору револьверної головки для закріплення інструменту, мм | 14 отверстий диаметром 30 | ||
| 5 | Внутрішліфувальний 3К228В | Найбільший діаметр, мм: | |
| встановлюваної заготівки | 560 | ||
| встановлюваної заготівки в кожусі | 400 | ||
| Найбільша довжина, мм: | |||
| встановлюваної заготівки | 200 | ||
| при найбільшому діаметрі отвору шліфування | 200 | ||
| Діаметр шліфованих отворів, мм | 50...200 | ||
| Найбільший хід столу, мм | 630 | ||
| Найбільше налагоджувальне поперечне переміщення, мм: | |||
| шліфувальної бабці: вперед (від робочого) | 60 | ||
| назад (на робочого) | 10 | ||
| бабці заготівки: | |||
| вперед (від робочого) | 200 | ||
| назад (на робочого) | 50 | ||
| Найбільший кут повороту бабці заготівки, град | 30 | ||
| Найбільший діаметр і висота шліфувального круга, мм | 180 х 63 | ||
| Швидкість руху столу, м/хв: при правці шліфувального круга | 0,1...2 | ||
| при шліфуванні | 1...7 | ||
| при швидкому подовжньому підведенні і відведенні | 10 | ||
| Частота обертання шпінделя, об/хв: | |||
| внутришліфувального | 75 100 150 200 | ||
| бабки заготовки | 1,66...10 | ||
| Торцешіифовального пристосування | 66,66 | ||
| Потужність електродвигуна приводу шліфувального круга, кВт | 5,5 | ||
| Маса (з приставним устаткуванням), кг | 6900 | ||
| Найбільший діаметр, мм: | |||
| встановлюваної заготівки | 560 | ||
| встановлюваної заготівки в кожусі | 400 | ||
| Найбільша довжина, мм: | |||
| встановлюваної заготівки | 200 | ||
| 6. | Зубофрезерний станок 53А50 | при найбільшому діаметрі отвору шліфування | 200 |
| Діаметр шліфованих отворів, мм | 50...200 | ||
| Найбільший діаметр нарізуваних коліс, мм | 500 | ||
| Найбільший модуль зубів нарізуваних коліс, мм | 8 | ||
| Найбільший кут нахилу зубів нарізуваних коліс, град. | ±60 | ||
| Найбільший вертикальний хід фрези, мм | 360 | ||
| Найбільший діаметр фрези, встановленої в супорті, мм | 180 | ||
| Осьове переміщення фрези, мм | 200 | ||
| Частота обертання шпінделя фрези, об/хв | 40-405 | ||
|
Подача, мм/об.: вертикальна радіальна осьова |
0,75-7,5 0,2-2,25 0,13-2,6 |
||
| Потужність головного електродвигуна, кВт | 10 | ||
| Маса, т | 9,7 | ||
3.8 Розрахунок режимів різання
Розрахуємо режими різання для розсвердлювання отвору Ø56.
Свердлення, зенкерування і розгортання є найбільш поширеними| технологічними способами обробки круглих отворів.
Свердлення (рис.3.3) - основний метод утворення отворів в металі оброблюваних заготовок.
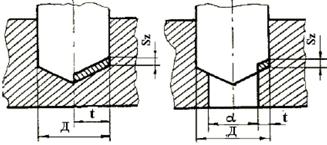
Рисунок 3.3. Схема різання при свердленні і розсвердлюванні
При свердленні, як правило, використовуються стандартні свердла, що мають дві ріжучі кромки, розташовані діаметрально щодо один одного.
Просвердлені отвори найчастіше не мають абсолютно правильної циліндричної форми. Їх поперечні перерізи представляють форму овалу, а подовжні - невелику конусність.
Глибина різання.
При свердленні глибина різання приймається t=0,5D, а при розсвердлюванні, зенкеруванні або розгортанні t=0,5(D-d), де D-діаметр інструменту, мм; d - діаметр попереднього отвору, мм.
t=0,5(D-d)=0,5(56-40)=8 мм.
Подача.
Подачу призначаю керуючись додатком [5] S=0.8 мм/об.
Призначена подача має бути скоректована по паспорту вибраного верстата. При цьому необхідно витримати умову: Sст <S, де Sст - остаточно встановлене по паспорту значення подачі. Scт=0,8 мм/об.
Швидкість різання.
Швидкість різання, м/хв, визначається:
![]() , (3.14)
, (3.14)
де D - діаметр свердла, зенкера або розгортки, мм;
Kv - загальний поправочний коефіцієнт.
Загальний поправочний коефіцієнт на швидкість різання, такий, що враховує фактичні умови різання визначається по формулі:
![]() (3.15)
(3.15)
де Кмv - коефіцієнт на оброблюваний матеріал; Киv - коефіцієнт на інструментальний матеріал; Кlv - коефіцієнт, що враховує глибину свердлення; Коефіцієнт Kмv розраховується таким чином:
При обробці стали:
![]() .
.
При обробці сірого чавуну:
![]() .
.
При обробці ковкого чавуну:
![]() .
.
Коефіцієнт, що враховує глибину отвору Кlv при свердленні приймається залежно від діаметру свердла.
![]() .
.
Після визначення швидкості різання, розраховується частота обертання шпінделя верстата np:
![]() (3.16)
(3.16)
де D - діаметр інструменту, мм.
![]() .
.
Набутого значення np коректується по паспорту верстата і приймається найближчий менший ступінь ncт=125 об/хв.
Обертальний момент, Нм і осьова сила, Н, розраховуються по наступних формулах:
![]() (3.17)
(3.17)
![]() , (
, (![]()
де ![]() и
и ![]() - коефіцієнти, що враховують умови різання.
- коефіцієнти, що враховують умови різання.
![]() ;
;
![]() .
.
Потужність різання.
Ефективна потужність різання визначається по формулі:
![]() (3.19)
(3.19)
![]()
Потрібна потужність різання:
![]() (3.20)
(3.20)
![]()
Пристрій програмного управління 2Р22 призначений для передачі управляючої програми на виконавські органи токарного верстата. Він виконує наступні фунцкції|:
- введення УП з клавіатури пульта;
- її обробку і редагування безпосередньо на верстаті;
- складання УП за зразком при обробці першої деталі в ручному режимі;
- використання складних циклів багатопрохідної обробки;
- виведення УП на програмоноситель| та ін.
Керуючись [10] розробимо управляючу програму в системі 2Р22 для обробки зубчатого колеса на токарно-гвинторізному верстаті з ЧПК 16К30Ф3.
Таблиця 3.10. Управляюча програма для обробки зубчатого колеса на токарно-гвинторізному верстаті з ЧПК 16К30Ф3
|
Обрабка торця 1 N001 S2 250 F0.5 T1* N002 X423 Z-2.5 E* N003 X296* Обрабка торця 2 (черновая) N004 S2 350* N005 X147 Z1 E* N006 Х51* Обрабка торця 2 (чистовая) N007 X-500 Z150 E* N008 S2 315 F0.8 T2* N009 X147 Z0 E* N010 X51* Точіння фасок N011 X-500 Z150 E* N012 S2 350 F0.5 T3* N013 X338 Z-5.5 E* N014 X340 C3* N015 X122 Z-5.5 E* N016 X120 C-3* |
Розточування отвору (чорнове) N017 X-500 Z150 E* N018 S2 500 F0.3 T4* N019 X78 Z1 E * N020 Z0* N021 L09 A1 P4* N022 X71 C-3.5* N023 Z-115 M17* Розточування отвору (чистове) N024 X-500 Z150 E* N025 S2 1000 F0.1 T5* N026 X71 Z1 E* N027 L10 B23* N028 M02* |
Розмірним ланцюгом називається послідовний ряд взаємозв'язаних лінійних розмірів, створюючих замкнутий контур і що безпосередньо беруть участь в рішенні поставленої задачі. Кожен розмірний ланцюг містить початкову і складових ланок. Під розмірним технологічним ланцюгом розуміють розмірні ланцюги, ланки яких є операційними розмірами і припусками.
Замикаючим розміром в розмірному ланцюзі називається розмір, який в деталі виходить останнім в процесі її обробки.
З схеми розмірного ланцюга можна визначити рівняння замикаючої ланки.
![]() (3.21)
(3.21)
де ![]() - сума збільшуючих
складових ланок ланцюга;
- сума збільшуючих
складових ланок ланцюга;
![]() - сума зменшуючих
складових ланок ланцюга.
- сума зменшуючих
складових ланок ланцюга.
Зв'язок між допусками складових розмірів і замикаючих визначається правилом підсумовування допусків Тi :
![]() (3.22)
(3.22)
Проведемо розмірний аналіз для устанавлюваючого розміру при свердленні отвору. Замикаючою ланкою буде розмір А1, для нього складемо розмірну схему.

Рисунок 3.4. Розмірна схема свердлення отвору
Конструкторський розмір А1 – замикаючий розмір.
А1=18-0,4;
А2=43,5-0,15;
А3=105-0,22;
А0=43,5.
Визначемо
![]() и
и ![]() склавши
рівняння:
склавши
рівняння:
Допуск Т на розмір A0 буде дорівнювати:
![]()
Отриманий
розмір ![]()
Для нормування технологічного процесу вибираю операцію з найбільшою кількістю переходів – токарно-револьверну операцію .
Основний час обробки визначаємо по формулі [4]:
 (3.23)
(3.23)
де ![]() - довжина урізування
інструменту на робочій подачі;
- довжина урізування
інструменту на робочій подачі;
![]() -довжина робочого ходу;
-довжина робочого ходу;
![]() - довжина перебігання;
- довжина перебігання;
![]() - число проходів інструменту;
- число проходів інструменту;
![]() - хвилинна подача інструменту.
- хвилинна подача інструменту.
Формула для розрахунку допоміжного часу:
![]() (3.24)
(3.24)
де ![]() - час на установку і
зняття заготівки;
- час на установку і
зняття заготівки;
![]() -час, пов'язане з переходом;
-час, пов'язане з переходом;
![]() -час на вимірювання.
-час на вимірювання.
Оперативний час знаходимо як суму основного і допоміжного :
![]() . (3.25)
. (3.25)
Формула для визначення підготовчо-завершального часу:
![]() , (3.26)
, (3.26)
де ![]() - час на наладку верстата,
інструменту, пристосувань;
- час на наладку верстата,
інструменту, пристосувань;
![]() - час на отримання інструменту до початку обробки і здачу після
закінчення.
- час на отримання інструменту до початку обробки і здачу після
закінчення.
Штучний час знаходимо по формулі:
![]() (3.27)
(3.27)
де ![]() = 0,03
= 0,03 ![]() - час на обслуговування верстата; Т =0.04
- час на обслуговування верстата; Т =0.04 ![]() - час нормованого
відпочинку. Штучно-калькуляційний час знаходимо по формулі:
- час нормованого
відпочинку. Штучно-калькуляційний час знаходимо по формулі:
![]() , (3.28)
, (3.28)
де N
– розмір партії. Використовуючи формули (9.1) -(9.6), для визначення Т![]() , Т
, Т![]() , Т
, Т![]() , Т
, Т![]() , Т
, Т![]() знаходимо Т
знаходимо Т![]() для
кожної операції.
для
кожної операції.
3.12 Економічне зрівняння технологічного процесу
Вибір найкращого варіанту технологічного процесу зі всіх можливих може бути здійснений різними способами. Якщо зі всіх можливих варіантів є такий, на впровадження якого потрібний найменші капітальні вкладення і який забезпечує найнижчу собівартість одиниці продукції, цей варіант є якнайкращим. Проте на практиці частіше варіанти з великими питомими капітальними вкладеннями забезпечують при впровадженні меншу собівартість одиниці продукції. У цих випадках технологічний варіант визначається за допомогою нормативного коефіцієнта ефективності або приведених витрат.
При визначенні раціональності заміни варіанту техніки, що діє, технології, способу організації виробництва новим розраховують коефіцієнт порівняльної ефективності [8].
![]() (3.29)
(3.29)
Тут С – собівартість продукції, а К –
капітальні вкладення, ![]() – нормативний
коефіцієнт ефективності,
– нормативний
коефіцієнт ефективності, ![]() = 0,15.
= 0,15.
Порівняємо такі варіанти технологічного процесу (операція 020):
1. Обробка деталі на токарно-револьверному верстаті.
2. Обробка деталі на верстаті з ЧПК.
Собівартість продукції визначається шляхом складання всіх витрат, а саме:
![]() , (3.30)
, (3.30)
де ![]() -
вартість основних і допоміжних матеріалів, для обох видів обробки величина
-
вартість основних і допоміжних матеріалів, для обох видів обробки величина ![]() однакова і постійна;
однакова і постійна;
![]() – витрати, пов'язані із заробітною платою основного
робочого;
– витрати, пов'язані із заробітною платою основного
робочого;
![]() – витрати, пов'язані із заробітною платою допоміжного
робочого (наладчик) з урахуванням всіх видів доплат і нарахувань;
– витрати, пов'язані із заробітною платою допоміжного
робочого (наладчик) з урахуванням всіх видів доплат і нарахувань;
Ао – амортизаційні відрахування від вартості устаткування;
Ат.о – амортизаційні відрахування від вартості технологічного оснащення на одну деталь;
Ро – витрати, пов'язані з ремонтом і обслуговуванням устаткування;
И – витрати, пов'язані з інструментом;
Ло – витрати на технологічну електроенергію;
Пл – витрати, пов'язані з амортизацією виробничих площ;
Ппр – витрати на ремонт і обслуговування управляючих пристроїв і програм.
Витрати, пов'язані із заробітною платою основних робочих визначаються по формулі:
 (3.31)
(3.31)
де ![]() –
норматив годинної заробітної плати верстатника ;
–
норматив годинної заробітної плати верстатника ;
![]() – коефіцієнт верстатного обслуговування.
– коефіцієнт верстатного обслуговування.
При обробці на універсальному устаткуванні:
![]() =12,5 грн. /год. – для верстатника 3-го розряду;
=12,5 грн. /год. – для верстатника 3-го розряду;
![]() =1, оскільки багатоверстатне обслуговування неприпустимо
при даному виробництві.
=1, оскільки багатоверстатне обслуговування неприпустимо
при даному виробництві.
На підставі цього отримуємо:
- заробітна плата основного робочого для токарно-револьверної операції для серійного типу виробництва:
![]() грн.
грн.
- заробітна плата основного робочого для
токарно-револьверної з ЧПК для середньосерійного типу виробництва (при
використанні оператора 3-го розряду ![]() = 8,4
грн/год і
= 8,4
грн/год і ![]() =0,7):
=0,7):
![]() грн.
грн.
Витрати, пов'язані із заробітною платою допоміжних робочих визначаються по формулі:
 , (3.32)
, (3.32)
де ![]() –
норматив заробітної плати наладчика ; m –
число змін роботи верстата;
–
норматив заробітної плати наладчика ; m –
число змін роботи верстата; ![]() – число верстатів, що обслуговуються наладчиком за зміну:
– число верстатів, що обслуговуються наладчиком за зміну: ![]() =6;
=6; ![]() – дійсний річний фонд часу роботи верстата.
– дійсний річний фонд часу роботи верстата.
![]() грн.
грн.
Витрати, пов'язані з амортизаційними відрахуваннями на устаткування:
 , (3.33)
, (3.33)
де Ф – вартість устаткування;
![]() – норма амортизаційних відрахувань.
– норма амортизаційних відрахувань.
![]() грн;
грн;
![]() грн.
грн.
Витрати, пов'язані з амортизаційними відрахуваннями на технологічне оснащення:
 (3.34)
(3.34)
де ![]() –
вартість технологічного оснащення;
–
вартість технологічного оснащення;
![]() – річна програма випуску виробів.
– річна програма випуску виробів.
![]() грн;
грн;
![]() грн.
грн.
Витрати, пов'язані з ремонтом і обслуговуванням устаткування
 , (3.35)
, (3.35)
де Нм, Не – нормативи річних витрат на ремонт електричної і механічної частин устаткування;
Км., Ке – коефіцієнти складності ремонту електричної і механічної частин устаткування;
![]() – коефіцієнт запасу точності устаткування (
– коефіцієнт запасу точності устаткування (![]() =1).
=1).
![]() грн;
грн;
![]() грн.
грн.
Витрати, пов'язані з інструментом:
 , (3.36)
, (3.36)
де ![]() –
вартість інструменту;
–
вартість інструменту;
![]() – термін служби інструменту.
– термін служби інструменту.
![]() грн;
грн;
![]() грн.
грн.
Витрати на технологічну електроенергію:
 ,
,
де Nэ – потужність електродвигуна;
![]() – тариф електроенергії.
– тариф електроенергії.
![]() грн;
грн;
![]() грн.
грн.
Витрати, пов'язані з амортизацією виробничих площ:
 , (3.37)
, (3.37)
де ![]() – річні
витрати;
– річні
витрати;
![]() – площа в плані;
– площа в плані;
![]() – коефіцієнт враховує площу системи управління.
– коефіцієнт враховує площу системи управління.
![]() грн;
грн;
![]() грн.
грн.
Розрахунок економічної частини ведемо методом повної собівартості з урахуванням капітальних вкладень. Згідно цьому, повна собівартість по витратах на одну деталь:
![]() грн;
грн;
![]() грн.
грн.
У капітальні вкладення включаються витрати на виробниче устаткування, інструменти і пристосування.
 грн; (3.38)
грн; (3.38)
де ![]() -
коефіцієнт, що враховує додаткові витрати на установку устаткування;
-
коефіцієнт, що враховує додаткові витрати на установку устаткування;
Ц – ціна устаткування.
![]() грн;
грн;
![]() грн.
грн.
Коефіцієнт порівняльної ефективності:
![]()
Застосування обробки на верстаті з ЧПК є більш вигідно.
4. ІНЖЕНЕРНІЙ АНАЛІЗ ОБ'ЄКТУ ВИРОБНИЦТВА
4.1 Опис об'єкту моделювання
Об'єктом дослідження є пружна втулково-пальцева муфта МУВП, розташована на вхідному валу редуктора, вживана для з'єднання вхідного валу редуктора і ротора електродвигуна. Муфта, яка представлена на рисунку 4.1 розглядатиметься в системі робочий орган (зірочка) – редуктор – МУВП – двигун.

Рисунок 4.1. Муфта пружна втулково-пальцева
Пружна втулково-пальцева муфта має всі властивості, які необхідні при роботі на великих швидкостях обертання (n=2880 об/хв):
- здатність пом'якшувати поштовхи і удари. Кінетична енергія удару при цьому частково поглинається і переходить в тепло, частково акумулюється пружними елементами, перетворюючись на потенційну енергію деформації;
- пружні муфти можуть служити засобом захисту від резонансних крутильних коливань, що виникають в механізмі унаслідок нерівномірності обертання;
- пружні муфти допускають порівняно великі зсуви осей валів, що сполучаються. При цьому, завдяки деформації пружного елементу, вали і опори навантажуються порівняно малими силами і моментами.
МУВП мають наступні характеристики, які враховуватимуться при динамічному аналізі:
-
жорсткість (або зворотна величина - податливість), що є залежністю відносного
кута повороту напівмуфти від величини обертального моменту Мкр; Жорсткість
муфти визначається як похідна від обертального моменту по куту закручування і є
величиною змінною, залежною від ![]() .
.

Обертальний момент у свою чергу пропорційний куту закручування ![]() .
.

Рисунок 4.2. Залежність обертального моменту від кута закручування
- демпфування, тобто здатність необоротно поглинати механічну енергію;
- енергоємність, що є роботою пружної деформації муфти при дії деякого обертального моменту. Енергоємність є порівняльною характеристикою муфт і не може бути використана при динамічному аналізі.
4.2 Розробка структурної схеми об'єктуДосліджувана муфта при роботі редуктора навантажена обертальним моментом, який при включенні, виключенні двигуна, а також залежно від особливостей роботи редуктора змінюється в часі. В результаті в ній виникають крутильні коливання, що обумовлюють динамічні навантаження, зменшення довговічності редуктора, а в деяких випадках і втрату стійкості динамічної системи. З метою дослідження забезпечення оптимальних динамічних характеристик приводу необхідне дослідження його елементів, зокрема муфт, зубчатих зачеплень, приводного електродвигуна.
Структурна схема для дослідження пружної муфти, складатиметься з виконавчого органу (зірочки) 1, вихідного валу 2, зубчатого циліндричного прямозубого колеса 3, проміжного валу 5 з прямозубої циліндричної шестерні 4 і косозубого циліндричного колеса 6, валу 8 з шестернею 7 і конічним колесом з круговим зубом 9, конічної шестерні 10, вихідного валу редуктора 11, МУВП 12 і двигуна 13.
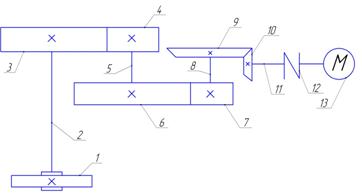
Рисунок 4.3. Початкова структурна схема досліджуваного об'єкту
Для зручного математичного опису даної структурної схеми приведемо її до двохмасової, представивши перераховані елементи як розподілені (вали) і зосереджені (зубчаті колеса, зірочка, двигун) маси зі своїми моментами інерції.
Початкові дані, необхідні для приведення системи до двохмасової приведемо в таблиці 4.1. для зручності подальшого дослідження.
Таблиця 4.1. Початкові дані для приведення системи до двохмасової
| № Елементу | Довжина (ширина), мм | Діаметр, мм |
| 1 | 20 | 420 |
| 2 | 63/90/80/5/115/35 | 56/60/71/80/71/60 |
| 3 | 100 | 390 |
| 4 | 110 | 130 |
| 5 | 30/80/5/122/25 | 45/50/60/50/45 |
| 6 | 60 | 351,03 |
| 7 | 70 | 60,96 |
| 8 | 30/75/40/80/20 | 25/28/30/35/25 |
| 9 | 30 | 255,98 |
| 10 | 30 | 49,9 |
| 11 | 55/40/94 | 25/28/25 |
Визначаємо моменти інерції всіх елементів приводу, що обертаються. Момент інерції ротора двигуна підрахуємо по наступній залежності:
![]()
де ![]() –
маховий момент двигуна по [17] .
–
маховий момент двигуна по [17] . ![]() =0,237
кг·м2.
=0,237
кг·м2.
![]()
Момент інерції деталі, що є суцільним тілом обертання, визначається по залежності:
де — щільність матеріалу деталі;
![]() -
діаметр деталі;
-
діаметр деталі;
![]() –
довжина деталі
–
довжина деталі
Вали є розподіленими масами. При довжині валу до 300 мм до моментів інерції зосереджених мас, що знаходяться на нім, приєднують третину моменту інерції валу. При довжині деталі більше 300 мм до моментів інерції зосереджених мас приєднують шосту частину моменту інерції валу.
Момент інерції ступінчастого валу визначається по формулі:
![]()
Обчислимо момент інерції зубчатого колеса 3:
![]()
Моменти інерції останніх елементів приведемо в таблиці 4.2.
Таблиця 4.2. Моменти інерції елементів, що становлять
| № Элементу |
Момент інерції, кг·м2 |
| 1 | 0,485 |
| 2 | 0,00566 |
| 3 | 1,771 |
| 4 | 0,024 |
| 5 | 0,00119 |
| 6 | 0,697 |
| 7 | 0,00074 |
| 8 | 0,000165 |
| 9 | 0,0986 |
| 10 | 0,000142 |
| 11 | 0,0000634 |
| 12 | 0,00769 |
| 13 | 0,014 |
Далі приведемо
систему до двохмасової. Приведемо моменти інерції валів до зосереджених мас
(колесам, зірочці). Кожну напівмуфту представимо у вигляді зосереджених мас з
моментами ![]()

Результати даного приведення приведені на рисунку 4.4.
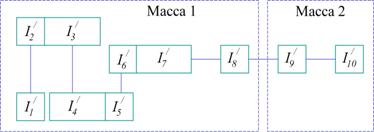
Рисунок 4.4. Перший етап приведення моментів інерції
Приведені моменти інерції розрахуємо по наступних формулах:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Моменти інерції мас(зубчатого зачеплення), що обертаються, приведемо в одну масу по наступній залежності:
![]()
де ![]() -
передатне відношення передач від валу 1 до валу з номером k.
-
передатне відношення передач від валу 1 до валу з номером k.
![]()
![]()
![]()
![]()
![]()
Приведену схему представимо на рисунку 4.5.

Рисунок 4.5. Другий етап приведення моментів інерції
Приведені моменти інерції розрахуємо по наступних формулах:
![]()
![]()
![]()
Підсумовуючи отримані моменти інерції, отримаємо приведену схему, таку, що складається з двох мас.
![]()
Рисунок 4.5. Остаточна схема приведених моментів інерції
![]()
![]() 0,00385=183,382
0,00385=183,382
![]()
![]()
![]()
Для забезпечення можливості дослідження динамічних характеристик моделі і для спрощення процесу складання диференціальних рівнянь, що описують модель, приймемо деякі допущення у властивостях досліджуваного об'єкту.
Всі ланки є абсолютно твердими тілами. Зуби не згинаються при контакті, зубчаті колеса не деформуються. Допущення прийняте щоб уникнути появи нелінійного елементу в моделі оскільки метал, що деформується, змінюється згідно із законом Гука. Дослідження моделі з даним допущенням не приведе з істотної погрішності результатів (оскільки деформації металу дуже малі в порівнянні з коливаннями, що виникають в досліджуваному об'єкті), а тільки спростить складання математичної моделі системи.
Кінематичні пари не мають зазорів між елементами. Зазори між зубами в зубчатому зачепленні, що впливають на динаміку приводу, виникають при першому включенні двигуна. При подальшій роботі зуби щільно прилягають один до одного. Приймемо допущення, що досліджуваний двигун вже знаходився в роботі, а перше його включення відбувалося на безпечних режимах.
Механічна характеристика двигуна при постійній його роботі (на сталому режимі) є константою, тобто момент, що крутить, на роторі двигуна МД=const. Крива моменту при включенні двигуна представлена на рисунку 4.6.
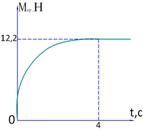
Рисунок 4.6. Обертальний момент двигуна у момент його включення
4.4 Розробка фізичної і математичної моделі об'єктуФізична модель приводу конвеєра, представлена на рисунку 4.6. складатиметься з двох мас, сполучених пружиною з жорстокістю С і демпфером з демпфуючою здатністю h. З правого боку на систему діятиме рушійний момент (момент електродвигуна) МД, з лівого боку діє момент сил опору Мс.
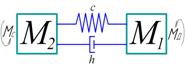
Рисунок 4.7. Фізична модель об'єкту
Для дослідження
динамічних характеристик МУВП (зміни крутильних коливань) необхідно описати
систему за допомогою системи диференціальних рівнянь. Початковими даними для
складання системи диференціальних рівнянь служитимуть: моменти інерції ![]() ,
демпфуюча здатність муфти h, момент ротора двигуна МД, момент сил
опору Мс.
,
демпфуюча здатність муфти h, момент ротора двигуна МД, момент сил
опору Мс.
Демпфуюча здатність МУВП h розраховується по наступний формулі:
![]()
де ![]() –
обертальний момент, що передається муфтою
–
обертальний момент, що передається муфтою ![]() =12,2
Н•м ;
=12,2
Н•м ;
n – частота обертання муфти, n=2880 об/хв.
![]()
Диференціальні
рівняння складаються на основі узагальненої координати, кута закручування валів
![]() .
Різниця між кутом закручування валу двигуна
.
Різниця між кутом закручування валу двигуна ![]() і
кутом закручування вхідного валу редуктора
і
кутом закручування вхідного валу редуктора ![]() 2
буде кутом закручування муфти. Рівняння матимуть наступний вигляд:
2
буде кутом закручування муфти. Рівняння матимуть наступний вигляд:

Для розробки досліджуваної моделі за допомогою середовища Matlab необхідно дану систему рівнянь перетворення Лапласа:
![]() .
.
Для цього необхідно підрахувати матриці A,B,C,D. Для розрахунку матриць введемо наступні заміни:
![]()
![]()
![]()
![]()
Звідси похідні від x будуть рівні:
![]()
![]()
![]()
![]()
Знаходимо
матриці A,B,C,D і підставляємо в рівняння Лапласа. Матриця D матиме два рядки
оскільки система має два виходи (кут закручування валу двигуна ![]() і
кут закручування вхідного валу редуктора
і
кут закручування вхідного валу редуктора ![]() )
і один стовпець - вхід (момент, що діє на систему).
)
і один стовпець - вхід (момент, що діє на систему).
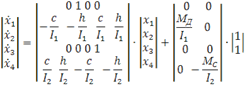
Маючи матриці можна реалізувати модель системи в середовищі Matlab.
Подамо на вхід системи для иммитации включення двигуна момент, наростаючий по параболі. Початковими даними будуть:
I1=0,0179;
I2=183,382;
q= 75 ![]() ;
;
r=0,008;
Md=12.2 – момент двигуна на сталому режимі
Графік вхідного сигналу (моменту) матиме наступний вигляд:

Рисунок 4.8. Графік вхідного сигналу
З графіка видно, що момент ротора двигуна виходить на сталій режим за секунд .
Модель Simulink буде мати такий вигляд:
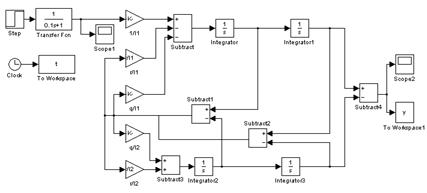
Рисунок 4.9. Модель системи при плавному включенні двигуна
Використовуючи блок Scope проаналізуємо отриманий результат:
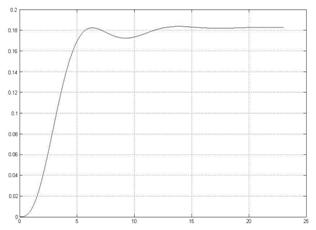
Рисунок 4.10.
Коливання кута закручування муфти у момент включення двигуна при q= 75
![]() .
.
З графіка видно,
що при плавному застосуванні на систему моменту від ротора двигуна при q=75![]() муфта
обернеться на 13,68 градуси (0,16
рад.) що неприйнятно для
приводу конвеєра. Коливальний процес триватиме 15 секунд.
Міняючи
жорсткість муфти можна добитися кращі показники системи:
При
жорсткості q= 130
муфта
обернеться на 13,68 градуси (0,16
рад.) що неприйнятно для
приводу конвеєра. Коливальний процес триватиме 15 секунд.
Міняючи
жорсткість муфти можна добитися кращі показники системи:
При
жорсткості q= 130 ![]() коливальний
процес буде мати наступний вигляд:
коливальний
процес буде мати наступний вигляд:
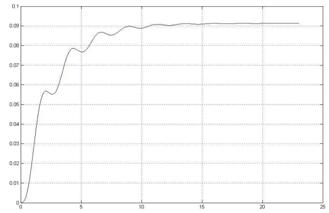
Рисунок 4.11.
Коливання кута закручування муфти у момент включення двигуна при q= 130 ![]()
При даній жорсткості муфта обернеться на 5 градусів (0,093 радий.). Коливальний процес триватиме 12 секунд.
Оптимальні
параметри муфти отримаємо при q=270 ![]() . При даній жорсткості муфта обернеться на
2,57 градусів (0,047 радий.). Коливальний процес триватиме 10 секунд.
Представимо результат на рисунку 4.12.
. При даній жорсткості муфта обернеться на
2,57 градусів (0,047 радий.). Коливальний процес триватиме 10 секунд.
Представимо результат на рисунку 4.12.
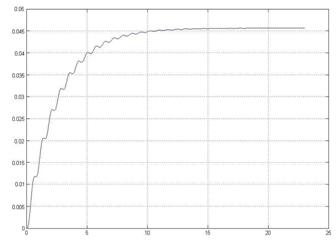
Рисунок 4.11.
Коливання кута закручування муфти у момент включення двигуна при q= 270 ![]()
Такі ж результати отримаємо використовуючи М-file в Matlab. Представимо програму з Matlab.
I1=![]() ; I2=183,382;
q= 270 ; r=0.008;
; I2=183,382;
q= 270 ; r=0.008;
Md=12.2; Ms=11.7;
G=[I1 0;0 I2];
R=[r -r;-r r];
T=[q -q;-q q];
M=[Md;-Ms];
a=[zeros(2,2) eye(2,2);-inv(G)*T -inv(G)*R]; b=[0;0;inv(G)*M];
c=eye(4,4); d=zeros(4,1);
x0=[0;0;0;0]; t=0:0.1:30; u=ones(1,length(t)-exp(-t/0.1)); S=ss(a,b,c,d);
[y,t,x]=lsim(S,u,t,x0);
figure; plot(t,x(:,1)-t,x(:,2)),grid;
У
результаті отримаємо оптимальну жорсткість муфти, знайдену эксперементальным
шляхом засобами ,Matlab рівну 270 ![]() .
.
Результатом бакалаврської роботи було досягнення поставленої задачі, а саме покращення ефективності констукторсько-технологічної підготовки. Була розроблена електронна модель підготовки виробництва триступеневого конічно-циліндричного редуктора з усіма необхідними розрахунками конструктивних елементів (вали, колеса), а також вибором стандартних (підшипники, муфти) елементів. На основі наведених проектувальних та перевірних розрахунків була створена 3D-модель редуктора.
Для подальшої
розробки був обраний вхідний вал. Для контролю точності поверхні вала ![]() під
шестерню спроектовано калібр-скобу, а для контролю отвору
під
шестерню спроектовано калібр-скобу, а для контролю отвору ![]() була
спроектована калібр-пробка.
була
спроектована калібр-пробка.
Наступним етапом була технологія обробки деталі за умов серендньосерійного виробництва. Для даного зубчатого колеса проведено аналіз технологічності. Визначено економічний метод отримання заготівки (штампування в підкладних штампах). На основі цього спроектована заготівка. Далі був розроблений, згідно з кресленням деталі, маршрут обробки деталі та призначені припуски на механічну обробку. Згідно з обраним маршрутом обробки, обране металообробне обладнання та технологічне оснащення – приладдя, вимірювальний та різальний інструмент. Розраховані режими різання для свердління отвору Ø56 та пронормована операція, яка містить найбільшу кількість переходів – токарно-револьверна. Проведена розробка управляючої програмі для токарно-револьверної операції в системі 2Р22. Також був проведен порівняльний економічний аналіз обробки деталі на токарно-револьверному верстаті з обробкою на верстаті з ЧПК. На основі усіх отриманих та обраних показників розроблений комплект технологічної документації, складений із маршрутних та операційних карт, а також карт ескізів. Також розроблені креслення карт налагодження на 3 операції токарно-револьверну, зубофрезерну, радіально-свердлильну.
Для визначення
динамічних процесів в вхідній муфті проведено її динамічний аналіз. У
результаті було встановлено, що на коливання, виникаючи в муфті під час роботи
редуктора суттєво впливає величина жорсткості муфти, яка була визначена
експериментально за допомогою Matlab.
Оптимальним значенням жорсткості має бути 270 ![]() .
.
ПЕРЕЛІК ВИКОРИСТАНИХ ДЖЕРЕЛ
1. Методические указания по курсовому проектированию деталей машин. Раздел 1. Краткая инструкция, расчет исходных данных (для студентов всех специальностей)/ Сост.: В.С. Исадченко, В.П. Онищенко, О.К. Помазан. – Донецк: ДПИ, 1981. – 51 с.
2. Методические указания к самостоятельной работе над курсовым проектом по деталям машин. Раздел 2. Этапы "Эскизный проект" и "Технический проект". Проектирование зубчатых и червячных передач (для студентов технических специальностей)/ Сост.: В.С. Горелик, В.С. Исадченко, В.И. Проскурин, П.М. Матеко, А.Л. Симонов, В.П. Алиферов. – Донецк: ДПИ, 1992. – 84 с.
3. Методические указания по курсовому проектированию деталей машин. Раздел 3. Расчет и конструирование валов (для студентов всех специальностей)/ Сост.: П.М. Матеко, А.Л. Симонов, В.Ф. Ващенко. – Донецк: ДПИ, 1981. – 48 с.
4. Методические указания по курсовому проектированию деталей машин. Конструирование муфт и корпусов (для студентов механических специальностей) / Сост.: В.С. Исадченко, П.М. Матеко, В.С. Горелик. – Донецк: ДПИ, 1987. – 43 с.
5. Методические указания по курсовому проектированию деталей машин. Конструирование муфт и корпусов (для студентов механических специальностей) / Сост.: В.С. Исадченко, П.М. Матеко, В.С. Горелик. – Донецк: ДПИ, 1987. – 43 с.
6. Допуски и посадки: Справочник в 2-х ч. Ч. 1/ Под ред. В.Д. Мягкова. — 5-е изд., перераб. и доп. — Л.: Машиностроение. Ленингр. отд-ние, 1979. — 544 с.
7. Курсовое проектирование по технологии машиностроения: [Учеб. пособие для машиностроительных спец. вузов]. Горбацевич А. Ф., Шкред В. А.. – 4-е изд., перераб. и доп. – Мн.: Выш. школа, 1983. – 256 с.
8. Справочник технолога-машиностроителя в 2-х томах. Том 2/ Под ред. Косиловой А.Г., Мещерякова Р.К. - 4-е изд., перераб. И доп., 1986 – 656 с.
9. Справочник технолога "Обработка металлов резанием". Под ред. Панова А.А.1986 р.
10. Методические указания к лабораторным работам по дисциплине "Станки с ЧПК и программирование станков с ЧПК". (для студенитов всех специальностей 7.090203)/ Сост.: Л.П. Калафатова, И.В. Киселева, А.В. Байков. – Донецк: ДПИ, 1998. – 47 с.
11. ГОСТ 1050-88. Сталь качественная и высококачественная.
12. ГОСТ 6639-69. Номинальные линейные размеры.
13. ГОСТ 21150-80. Смазка ЛИТОЛ-24. Технические условия.
14. ГОСТ 21424-93. Муфты упругие втулочно-пальцевые. Параметры и размеры.
15. ГОСТ 520-89. Подшипники качения. Общие теххнические условия
16. ГОСТ 2.403-75. Единая система конструкторской документации. Правила выполнения чертежей цилиндрических зубчатых колес.
17. Курсовое проектирования "Конструирование и расчет металлорежущих станков и станочных комплексов". Кочергин А.И., 1991 р.
18."Математичне модледювання процесів та систем механіки", Струтинський В.Б., 2001 р.