
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Дипломная работа: Интеллектуальные датчики
Дипломная работа: Интеллектуальные датчики
Введение
Одной из наиболее важных проблем, возникающих при создании и эксплуатации судовых технических систем, является обеспечение требуемого качества и надежности управления в условиях возмущающих факторов, к которым относятся изменения параметров регулируемого процесса и среды функционирования системы.
Для управления сложными динамическими объектами используются методы и технологии искусственного интеллекта как средства борьбы с неопределенностью внешней среды.
Бурное развитие интегральной схемотехники привело к созданию принципиально новых измерительных преобразователей-интеллектуальных датчиков, содержащих в одном корпусе преобразователь и микропроцессор, что позволяет выполнять основные операции по преобразованию и повышению достоверности измерительной информации в месте ее возникновения.
Использование интеллектуальных датчиков (ИД) дает возможность по-новому подойти к распределению функций между основными элементами систем контроля и управления, в частности освободить центральный процессор от необходимости обработки больших объемов первичной информации.
ИД позволяет обеспечить выполнение соответствующих функций, повышающих информативность выходного сигнала, формирование потока данных с необходимой достоверностью на основе анализа достаточно большого числа результатов отдельных, относительно недостоверных измерителей.
ИД представляет собой совокупность аппаратных и программных средств, обеспечивающих отображение свойств объекта контроля или управления в виде некоторой структуры данных, формируемых в результате обработки выходного сигнала измерительного преобразователя по определенному алгоритму.
Можно дать следующее определение интеллектуального датчика: это датчик, обладающий способностью автоматической адаптации к источнику сигнала и окружающей среды, а также способностью контролировать свои функции, корректировать ошибки измерений.
Интеллектуальный датчик представляет собой электронное устройство, основанное на объединении чувствительных элементов, схем преобразования сигналов и средств микропроцессорной техники.
Использование микропроцессоров и однокристальных микро-ЭВМ непосредственно в составе датчиков обеспечивает возможность улучшения метрологических и эксплуатационных характеристик.
Одним из основных принципов интеллектуального подхода к созданию исполнительных механизмов нового поколения заключается в переносе функциональной нагрузки от механических узлов к интеллектуальным (электронным, компьютерным и информационным) компонентам, которые легко перепрограммируются под новые задачи.
Для реализации интеллектуальных ИМ используются четыре основных функциональных блока:
• информационно-электрический функциональный преобразователь (ФП), включающий в себя контроллер управления движением и силовой электрический преобразователь;
• электромеханический ФП, включающий в себя электродвигатель и механическое передаточное устройство;
• электро-информационный ФП, стоящий в линии обратной связи ИМ и включающий в себя датчики напряжения и тока силового преобразователя;
• механико-информационный ФП, стоящий в линии обратной связи ИМ и включающий в себя датчики перемещения, частоты вращения, момента, силы.
Из выше сказанного следует, что при использовании новых технологий и методов обработки сигналов на хорошо известных принципах измерения создаются датчики со значительно лучшими свойствами.
Раздел 1. Понятие интеллектуального датчика. Принцип работы. Требования PC к интеллектуальным датчикам
1.1 Понятие об интеллектуальных датчиках
Новейшие средства микроэлектроники позволили помимо измерительных и подстроечных элементов интегрировать в датчики аналого-цифровые преобразователи и микропроцессоры, по-новому подойдя к проблеме распределения функций между элементами систем контроля и управления.
Объединение цифровых схем и микропроцессоров в одном устройстве позволяет производить не только усиление и коррекцию, но и часть обработки информации в самом датчике.
Такие интегральные датчики могут не только контролировать измеряемые величины, но и осуществлять их оценку, коррекцию по определенным критериям, контролировать свои собственные характеристики, работать в режиме диалога с центральной системой управления, принимать команды, передавать измеренные значения в цифровой форме, а также аварийные сообщения.
В отличие от интегральных датчиков, в которых на базе новых технологий осуществляется объединение чувствительных элементов со схемами их включения, а также линеаризация характеристик и термокомпенсация, датчики с встроенными вычислительными средствами принято называть интеллектуальными, учитывая многообразие их функций, возможности самоконтроля и двустороннего обмена информацией с системой управления.
Интеллектуальный датчик в силу особенностей своей структуры и расширенных функциональных возможностей позволяет обеспечить либо выполнение соответствующих функций, повышающих информативность выходного сигнала до необходимого уровня, либо формирование потока данных с необходимой достоверностью на основе анализа достаточно большого количества результатов отдельных, относительно недостоверных измерений. В результате реальные метрологические характеристики интеллектуальных ИП оказываются существенно выше характеристик датчиков в традиционном исполнении. Это связано с тем, что интеллектуальный датчик (ИД) является не просто датчиком, а представляет собой совокупность аппаратных и программных средств, обеспечивающих отображение свойств объекта в виде некоторой структуры данных, формируемых в результате обработки выходного сигнала первичного чувствительного элемента по определенному алгоритму.
Помещение технических средств обработки информации непосредственно к датчику логически оправдано тем, что каждый шаг обработки измерительного сигнала вдали от объекта измерения связан с увеличением погрешности измерения. В данном случае уместно заметить, что, интеллектуальный датчик имеет возможность согласования измерительного тракта с источником сигнала по чувствительности, динамическому диапазону, избирательности и подавлению помех различного вида. Он адаптирует свои параметры к внешним факторам и условиям, обеспечивает автоматический самоконтроль функционирования, осуществляет операции юстировки и тарировки, производит коррекцию погрешностей.
В автоматических системах управления и контроля интеллектуальные датчики выполняют следующие основные функциональные задачи:
-преобразование входного сигнала в сигнал требуемого вида с воспроизводимой функциональной связью между ними;
-преобразование полученного сигнала в форму, обеспечивающую помехозащищенную передачу к устройству обработки данных по каналу связи;
-избирательную регистрацию и предварительную обработку выходного сигнала;
-подавление существенных для решения данной задачи помех (возмущающих воздействий);
-реагирование на изменяющиеся условия в точках контроля;
-обеспечение и контроль собственного функционирования.
Эти задачи предопределяют те интеллектуальные свойства, которыми должен обладать датчик, а именно: -способность к самонастройке , т.е. изменению чувствительности и динамических характеристик в соответствии с диапазоном и скоростью изменения выходной величины, а также подавлению помех; -адаптивность к условиям окружающей среды;
Способность датчика или системы датчиков к самодиагностике, включая коррекцию ошибок. Исходя из этого можно дать следующее определение интеллектуального датчика- это датчик, обладающий способностью автоматической адаптации к источнику сигнала и окружающей среде, а также способностью контролировать свои функции, корректировать ошибки измерений, и представляющий собой электронное устройство, основанное на объединении чувствительных элементов, схем преобразования сигналов и средств микропроцессорной техники».
Интеллектуальный датчик представляет конструктивно объединенную совокупность ИП и электронного компьютера, размещенную в зоне действия измеряемых величин, воспринимающую заключенную в объекте информацию о размере этих величин, обеспечивающую автоматическое согласование собственных параметров с параметрами измеряемых величин и внешними условиями, а также автоматический контроль собственного функционирования и компенсацию отдельных составляющий погрешностей.
Структурные схемы интеллектуальных датчиков.
Структурная схема ИД зависит от структурных схем измерительных преобразователей, входящих в сосшв .датчика,
Ни рисЛ .ia представлено функциональная схема ИД, соотие-иггвующая структурной схеме датчика прямого преобразования. На рис. 1-1 а введенм следующие обозначения:
· первичный измерительный преобразователь с неэлектрическим входным сигналом
· промежуточный измерительный преобразователь.;
· электронный блок подготовки и первичной обработки измерительного преобразователя;
· аналого-цифровой преобразователь;
· источник питания;
· микро-ЭВМ:
· интерфейс.
Выходной сигнал первичного МП может непосрсдствено преобразоваться в цифровую форму. Перличиый ИП может быть объединен с аналого-цифровым преобразователем.
Соответствующая структура ИД представлена на рис. 1.1б, где 1 - первичный ИП; 2 -аналого-цифровой преобразователь; 3 - устройство выборки и храпения; 4 - кодирующее устройство; 5-источник питания; 6- микро-ЭВМ; 7 - интерфейс.
Для дискретных измерительных сигналов обычно применяетется более простая структура ИД, которая отличается несколько меньшими аппаратными затратами (см. Рис. 1.1 в, где 1 – чувствительный элемент; 2 - преобразователь и формировитнль счетного сигнала; 3 - блок формировании нормированных электрических импульсов; 4 -счетчик; 5 - микро-ЭВМ;
6 - интерфейс). Для связи ИД, реал читанных согласно структурным схемам на рис. 1.1 с внешними блоками и управляющей ЭВМ обычно используются последовательные стандартные интерфейсы различных типов.
Развернутая структурная схема ИД представлена на рис.1.2, где 1 - первый и второй преобразователи с фильтрами; 2 - источник питания ячеек помята и электронных блоков; 3 - мультиплексор; 4 - блок управления маршрутами пересылки данных; 5 - блок определения отношения сигнал/шум; 6 - блок регулирования отношения сигнал/шум; 7 -усилитель; 8 - блок управления усилением (АРУ); 9 - аналого-цифровой преобразователь (АЦП); Ю - внутренняя шина датчика; 11 - программируемое постоянное запоминающее устройство (ПШУ) для хранения данных идентификации, коэффициентов калибровки, предыстории изменения операций во времени и др.; 12 - ППЗУ для хранения пр01рамм и другой информации; 13 - память с произвольной выборкой; 14 - микропроцессор; 15 -связной интерфейс (последовательный или параллельный); 16 - портативный пульт управления; 17 - коммуникационная шина или сеть.
Метрологические характеристики интеллектуальных датчиков
Можно указать на следующие особенности использования ИД по сравнению с традиционными датчиками.
Точность измерений зависит от внутренних погрешностей ИП (нелинейности, гистерезиса, недостаточной повторяемости), внешних условий, точности калибровки, степени воспроизводимости результатов, местоположения значения измеряемой величины в диапазоне измерения, точности, обеспечиваемой линиями передачи, приема и обработки сигнала.
Влияние этих фактором приводит к тому, что точность датчики класса 0,25% в реальных условиях составляет всею 1%. Однако точность измерений существенно повышается за счет внутренних вычислений, которые может выполнять ИД. Алгоритмы улучшения статических характеристик ВД позволяют производить коррекцию начального смещения и крутизны для строи» линейных статических характеристик, корректировку масштаба измерительного тракта, линеаризацию статических характеристик табличным методом, аппроксимацию с помошью полиномов, интерполяцию и т.д.
Благодаря возможностям самонастройки датчик выбирает наилучший диапазон измерения и посылает соответствующую информацию на верхний иерархический уровень. В случае выхода за границы диапазона измерений подается аварийный или предупредительный сигнал.
В ИД возможна коррекция влияния помех и различных возмущений за счет реализации дифференциальных методов измерений программными способами, использования итерационных методов обработки для нелинейных зависимостей, применения адаптивных методов коррекции с формированием скорректированною :шачении по результатам последнего измерения.
Интслпектушп.ный датчик надежней традиционных, так как они позволяют:
· упростить измерительный преобразователь, используя возможности его характеристик с помощью программного обеспечения, в том числе корректируя масштабы и внося поправки на температуру с помощью вычислительного устройспиц
· увеличить количество однотипных смертельных ячеек; свести к минимуму аналоговую часть - источник неисправности и искажений;
· ввести системы автоматическою контроля старения комитентов, повышающие надежность датчика в целом (обнаружение перенапряжений, разогрева, избыточного статическою давления и т.п.);
· контролировать состояние окружающей среды для обнаружения отклонений и исключения работы датчика нне установленных пределов; - контролировать работоспособность отдельных элементов и узлов, в том числе напряжения питания ни прецизионных элементах, уровни срабатывания, токи и напряжения смещения; • осуществлять автоматическую само калибровку по внешним или встроенным эталонным источникам.
Программное обеспечение позволяет антоматически управлять процессом измерений: включением/выключением, сменой диапазонов, переключением каналов измерений, частотой калибровки, порядком адресования. Выбор алгоритма, тест-сигналов, точек и времени измерений и др., а также выбор фильтров в соответствии с параметрами помех осуществляется в сооветствии с задачами измерений или по командам управляющей ЭВМ. Связь ИД с управляющей ЭВМ и другими периферийными устройствами реализуется программными способами по общей шине; передача сигналов осуществляется в режимах квитирования, с прерыванием и контролем программных средств, с последовательным и параллельным опросом, п режиме передачи и приема сигналом управления. ИД позволяет обрабатывать результаты измерений с целью сжатия пересылаемой информации, реализуя контроль предельных значений, а также выполняя заданные математические и логические операции в соответствии с поставленной задачей измерения.
Интеллектуальные датчики обеспечивают доступ к внутренней информации, которая может быть использована в цепях диагностики и профилактического обслуживания. Датчик через портативный пульт или посредством дистанционного управления с верхнего иерархического уровня дает оператору сведения о:
1. мгновенных значениях напряжений питания, промежуточных величинах, результатах вторичных измерений;
2.совокупности параметров, 'занесенных и намять перед возникновением неисправности;
3.дате последнего контроля, (калибровки, проверки нуля и т.п.);
4.причинах устраненных отказов;
5.вторичных параметрах, превмеишних допустимые пределы (внутренней температуре, абсолютном давлении и др.).
Интеллектуальные датчики, объединенные микропроцессорами, позволяют поднять на новый качественный уровень возможности создаваемых средств измерений. Идеальным уровнем «интеллектуалыикггн» датчика является интеграция его функций, которая не приводит к увеличению общих материальных затрат на разработку и создание средств измерений.
1.2 Обработка сигнала датчика
Несмотря на то, что сигнал на выходе чувствительного элемента может быть слабым, передаваемый сигнал должен иметь высокий уровень и, по возможности, лежать в подходящем диашпоне значений для того, чтобы дойти до основных устройств в неискаженном виде и упростить вычисление измеряемой неличины. Поэтому, в общем случае, сигнал сенсора должен пройти предварительную обработку, которая позволяет осуществи! ь многие важные задачи (рис.1.3), такие как:
· специальные меры обеспечения безопасности;
· соединение с другими компонентами последовательно, параллельно или в замкнутом контуре;
· усиление сигнала;
· масштабирование,
· линеризация
· преобразование сигнала
В настоящее время вошло в практику преобразование сигнала датчики п цифровую форму в самом датчике. В силу возрастающего применения распределенных систем с шинной архитектурой это становится нее более необходимым. В дополнение к ран рузке системы в целом достоинством янляется и то, что данные измерения могут передаваться без потери точности иезинисимо от расстояния между датчиком и устройствами обработки данных более высокою уровня. Перенос функций обработки сигналов с аппаратуры на программное обеспечение упрощает повышение точности измерений. Производственные отклонения можно учитывать путем простой параметризации вместо того, чтобы проводим, механическую или электрическую подстройку. Используя физические или Mint магические модели, описывающие поведение датчика, можно проводить более точные измерении, учитывая влияние различных факторов. В зависимости от физической природы измеряемой величины датчики делятся на две группы: датчики плекзрических величин, и датчики неэлетричюских величин, К первой группе относятся датчики, реагирующие на изменение напряжения, тока, частоты, мощности, ко иторой- дзршки, реагирующие на изменение температуры, давления, крутящего момент, частоты вращения и т.д. По роду выходной величины датчики делятся на электрические и неэлектрические. Электрические н зависимости от характера выходной величины подразделяют на два типа- параметрические и генераторные. Параметрические датчики преобразуют неэлектричсские измеряемые величины в параметры электрических цепей L, С, R. Такие преобразователи включаются в различные измертильные схемы, которые имеют дополнительный источник питания. В генераторных происходи! преобразование энергии измеряемой неличины в ЭДС постоянного или переменною тока Системы, состоящие из одного датчика, могут давать лишь частичную информацию о состоянии внешней среды, тогда как системы с множеством датчиков объединяют связанные данные от нескольких одинаковых и/или разных датчиком. Смысл применения многосенсорных систем состоит в создании синергстичсских эффектом, понышанпцих качество и доступность информации о состоянии измеряемого объекта. Цель обработки сигналов в многосенсорной системе - получить определенную информацию, используя необходимую совокупность данных измерения. В общем, требуется достичь определенного уровня, например, точности или надежности, коицют нельзя достичь, имея лишь один датчик. Например, для обнаружения присутствия используют ультразвуковые датчики с высокой чувствительностью к шуму, турбулентности воздуха из-за тепловых воздействий и колебаний штор и растений. Микроволновые датчики могут обнаружили, движение объектов вне наблюдаемою помещения или быть введены в заблуждение другими электромагнитными полями (от мобильных телефонов и т.п.). Комбинация обоих типов датчиков и применение специальных процедур обработки сигналов позволяет дост ичь более высокой надежности обнаружения за счет различия зависимостей да пиков от внешних воздействий. Результат свидетельствует о более качественной работе системы из нескольких датчиков по сравнению с системой с одним датчиком Сложная обработка сигналов, осиоваинаи на методах слияния данных может- повысит ь точность измерения более, чем используемый обычно простой пороговый алгоритм. Процесс слияния данных, поступающих от многих датчиков, должна просктироватт^и специально для каждого конкретного случая с учетом специфики применения для тою, чтобы обеспечить правильное определение всех требуемых измеряемых величин или решений (рис.1.4). Типичными подходами тдесь являются теория статистических решении, методы усреднения, калмановская фильтрация - -для слияния неточных данных датчиков; нечеткая логика – для сформулированных на качественном уровне задач и нейронные сети - для задач, где ожидаемому повелению можно обучить, используя набор характеризующих параметров.
Например, при измерениях концентрации шчои, н го время как отдельные датчики не обеспечивают достаточной точности, использование высококачественных аналитических устройств дорого и поэтому во многих случаях неприемлемо. Испил ьгмжание системы, включающей а себя несколько недорогих датчиков, позволяет существенно повысить надежность и точность измерений концентрации Газа. Существенными обстоятельствами при слиянии данных в этом случае яшоптим взаимная чувствительность датчиков и влияние таких факторов, как температура, книжность и давление. Значимые- влияющие факторы должны измеряться ранним и датчиками. В процессе калиброаки н|н>веряется реакция системы из нескольких датчиков на различные основные газы. К зависимости от этой реакции комбинация датчиков для слияния данных определяется блоком управления датчиками таким образом, чтобы в результате стало возможным проведение точных измерений концентрации, несмотря на недостатки отдельных датчиков.
Сегодня многосенсорные системы незаменимы в задач аварийного предупреждена, таких как охрана свободною пространства путем оценивания видеосигнала, обнаружение лежащего человека или ранее обнаружение пожара, и:ни фебуемого высокого уровня надежности. Например, для раннего обнаружения пожара предложены матрицы датчиков, включшощие в себя оптические детекторы рассеянного света и датчики концентрации газа. В пом случае обработка сигнала должна позволить различить ситуации пожара, отсутствия пожара и беспокоящего события путем идентификации характерных признаков пожара по измерениям выходных сигналов длчикин.
Блок выделения признаков необходим для понижения размерности измерительною пространства и извлечения соответствующей информации, характеризующей ситуации, связанные с возникновением пожара. Выделенные признаки далее классифицируются с помощью нейронных сетей с целью оценить к какому классу относятся данные измерения и следует ли посылать пожарной команде сигнал тревоги..
1.3 Разработка требований правил PC к интеллектуальным датчикам, как элементам повышенной надежности, предназначенным для реализации ответственных функций
Интеллектуальные датчики, исполнительные механизмы и регуляторы относится к м и к ^процессорным средствам автоматизации судовых технических средств, по лому предлшявмме любовании Правил PC соответствуют раздел}' 7 части XV Правил PC.
1.Для ответственных судовых устройств: сланные двигатели, балластные, топливные и осушительные устройства, подруливающие, устройства и т.п.; интеллектуальные средства автоматизации должны иметь избыточную конфигурацию.
2.Функции управления, аварийной сигнализации и безопасной остановки должны быть выполнены таким образом, чтобы одиночные неисправности или нарушения в работе электронной» оборудования не должны влиять более чем на одну из этих функций. Это может быть достигнуто выбором специального оборудования для выполнения каждой из этих функций, или обеспечением резервною оборудования, или другими эффективными средствами.
3. Неиспрпппости н интеллектуальных средствах автоматизации не должны приводить к аварийному состоянию обслуживаемого судового оборудования или всего судна в целом.
4. Для поддержания безопасной работы судил электронные регуляторы (ИР) главных дизелей должны обладать избыточностью с помощью резервирования.
5.При наличии резервного оборудования переключающие устройства должны быть такими, чтобы предотвратить нарушения в работе резервной электронной сиоемы и механизмов при их управлении.
6. Переключения между избыточными интеллектуальными средствами автоматизации должны происходить автоматически и не приводить к нарушению постоянного функционирования в случае неисправности. Требования переключения к пользователю должны быть простыми и легко выполнимы без затраты времени.
7.Электронные рмупяторы должны иметь энергонезависимый исшчник питания.
8.Для избежания возможной потери или искажения данных в результате отключения источника питания, программы и соответствующие запоминающие устройства, ответственные за работу ИР. должны иметь энергонезависимую память или Miepi«зависимую память с обеспечением бесперебойного источника питания.
9.Работа бесперебойного источника питания должна контролироваться. Неисправности должны индицироваться с сопровождением аварийного сигнала.
10. Интеллектуальные регуляторы (ИР) должны работать в режиме реальною времени. Время in клика должно соответствовать постоянным времени судового оборудования.
11. ИР совместно с исполнительными механизмами должны быть сконструированы 1иким образом, чтобы эффекты от неисправностей и сбоев в работе приводили к расчетному состоянию технических средств с наименьшими критическими последствиями.
12. Средства безопасности при неисправностях или сбоев в работе компонентов интеллектуальных устройств должны автоматически возвращать выходную величину в предопределенное расчетом состояние с наименьшими критическими последствиями.
13. Интеллектуальные регуляторы, обеспечивающие постоянное функционирование при постоянной готовности (работоспособности) не позволяют прерывать функционирование как при нормальных режимах работы, так и в случае одиночной неисправности системы.
14. Самоконтролирующие интеллектуальные устройства должны обнаруживать неисправности следующих типов:
· неиепраипосги;
· неисправности дитчикон и исполнительных элементов:
· неисправности компьютерною аппаратного обеспечения;
· нарушение ныполнеиия программного обеспечения;
· нарушение логических действий программного обеспечения.
15. Устройства, с помощью которых пользователь может ныходть на вход ИР, включая ручки, кнопки, выключатели, клавиши, джойстики и т.д., должны быть рассчитаны и устроены таким образом, чтобы избежать небрежных действий. Для ответственного оборудования должны использоваться специальные клавиши.
16.Интсллектупльные устройства должны быть рассчитаны таким образом, чтобы неисправности электронных компонентой не нызывали опасных действий устройства.
17. Системы программною и аппаратного обеспечения должны быть рассчитаны таким образом, чтобы при восстановлении питания после неиепраипосги источника питания возможность автоматического или дистанционного управления и контроль наступили немедленно.
18. Изменение параметров должно быть возможно при выполнении средств, ограничивающих доступность не подготовленному персоналу. В качестве таких средств могут использоваться кнопочные переключатели, перфокарты, пароли и г.п. Аналогично изменения программы и конфигурации системы должны выполняться только подготовленным персоналом.
19. В устройствах ввода-вывода должны использоваться стандартизированные устройства сопряжения с объектом.
20. Конструкция аппаратного обеспечения должна быть простой. Должен быть обеспечен доступ к «вменяемым частям для ремонта и обслуживания.
21. Разъемы в платах и соединениях должны иметь специальную конструкцию для шщитм от неумышленной перестановки, установки в неверное положение. Разъемы не должны повреждаться и вызывать нарушения в работе, которые могут привести к опасности.
22. Разьемы в платах и соединениях должны иметь специальную конструкцию для зашиты от неумышленной перестановки, установки в неверное положение. Разъемы не должны повреждаться и вызывать нарушения в работе, которые могут привести к опасности
23. Интеллектуальны с устройства должны быть защищены против неумышленных или неправильных модификаций программ и данных. Требуемые меры зависят от конфигурации устройства
| Вид готовности |
Максиамальное время |
| Постоянная |
0 |
| Высокая |
30 сек |
| С ручным восстановлением |
10 мин |
| Ремонтопригодных систем |
3 час |
24. Максимальное время восстановления, необходимое для приведения интеллектуальных устройств в рабочее состояние после неисправности определяется требованиями к их избыточности.
Раздел 2. Обзор интеллектуальных датчиков
2.1 Описание современных интеллектуальных датчиков
В литературе под термином « интеллектуальные датчики» понимают разные по возможности классы датчиков, часто любой датчик, имеющий в своем составе микропроцессор называют интеллектуальным датчиком независимо o r функций, выполняемых микропроцессором.
Структура ИД состоит из двух взаимосвязиiiimx блоков: элемента (сенсора) и прсобрамнипеля. Последний комплектуется из программируемою микропроцессора с оперитиипым и постоянным модулем памяти, аналого- цифрового преобразователя, сетевого контроллера связи с типовыми полевыми сетями. Как сенсор, так и преобразователь дотчика, обычно, имеют ряд вариантов исполнения, рассчитанных на различные свойства измеряемой и окружающей среды.
Варианты исполнения сенсора: различные методы восприятия измеряемых величин: разное соединение сенсора с конструкцией объекта измерения; разный тип корпуса сенсора, определяемый давлением, температурой, помехами в месте измерения: разный материал корпуса сенсора (под обычную, химически агресеиипую, активную, взрывоопасную, гишеническую среды).
Варианты исполнения преобразователя: питание от внутреннею или внешнего источника; разные виды выходных сигналов и коммутационных свя зей с полевыми сетями, разное защитное исполнение от возможных помех и свойств окружающей среды.
Большинство производителей комплектуют датчики из сочетания разных нариантов сенсоров с разными вариантами преобразователей,
рассчитанных на работу с данной серией сенсором, благодаря этому удается наиболее точки и полно удовлетворить отдельным конкретным требоианиям к прибору.
К последнее время получают распространение мулы исенсорные датчики, когда к одному преобразователю подключается ряд сенсоров, воспринимающих различные или однотиш!ые неличины.
Кроме обычных функций восприятия искомой неличины и преобразовать сигнала, современные интеллектуальные датчики выполняют ряд других функций, сущест ненно расширяющих их возможности и улучшающих их технические хорнктеристики.
В ИД проводятся необходимые преобразования измерительной информации: усиление сигналов сенсора, стандартизация диапазонов выходных аналоговых сигналов, линеаризация и фильтрация, расчет выходных значений но заданным алгоритмам, аналого-цифровое преобразование значений измеряемой неличины.
В процессе работы датчики выполняют анализ своей работы: при возникновении различных сбоин, нарушений и неисправностей фиксируют их место возникновения и причину, определяют выход погрешности прибора за установленное значение, анализируют работу балы данных датчика, рассматривают правильность учета факторов, которые корректируют выходные показания датчика. Датчик может выдавать оператору до 30-ти различных сообщений, конкретизирующих текущие особенности его работы и речко облегчающих и ускоряющих его обслуживание. Обычно информация, выдаваемая датчиком об отдельных его неисправностях, подразделяется на два типа:
1- некритическая информация, когда датчик требует определенного обслуживания, нпоо измеряемым им значения могут использоваться для управления;
2- критическая информация, когда выходные данные датчики неверны и либо требуется немедленное вмешательство оператора по приостановке использования его показаний, либо сям датчик переводит свой выход в постоянное безопасное для управления процессом значение, и сообщает о необходимости срочного обслуживания прибора.
Датчики хранят в своей памяти и по дистанционному запросу пользователя ныданп нее данные; определяющие свойства, характеристики, параметры данного конкретного прибора: его тип, заводской номер, технические показатели, возможные диапазоны измерения, устаможенную шкалу, заданные параметры настройки сенсора, работающую версию программной» обеспечения, архив проведенных метрологических поверок, срок проведения следующей поверки датчика и т.п. Кроме того датчики могут иметь архив текущих измеряемых и вычисляемых ими значений величин за заданный интервал времени.
В ИД осуществляется дистанционное формирование или модификация пользователем основных настроечных параметров датчики: установка нуля прибора, выбор заданного диапазона измерения, фильтрация текущих значений, выбор наименования единиц измерения, в которых датчик должен выдавать информацию и т.п. действия.
ИД выполняет автоматический анализ изменений измеряемой величины и текущего состояния срсды измерения: определение кыходов значений измеряемой величины за заданные нормы, выдача различных сообщений об изменениях значений измеряемой величины, проверка нахождения в допустимых диапазонах параметров измеряемой среды. Все эти функции дистанционно настраиваются пользователем.
В последнее время на ИД возлагают упршшяющие функции (особенно при их использовании с полевой сетью Foundation Ficldbus).
Для реализации этих функций в память микропроцессора датчика прошивается соответствующий набор типовых программных модулей, а их инициация и параметризация проводится дистанционно оиеритром с помощью простейшего графического конфигуратора. В качестве типовых программных модулей используются простейшие арифметические и логические операции, таймер, элемент чистою запаздывания, mnei-parop, варианты регуляторов: Р, 1, PI, PD, PED и т.п. функции, из которых легко набираются конкретные алгоритмы регулирований разных видов, блокировочные эазисимости, алгоритмы смешивания и другие алгоритмы управления технологическими процессами.
Коммуникационно современные интеллектуальные датчики поддерживают три стандарта полевых сетей: сеть с HART-протоколом, сеть Frofibus, Foundation Fieldbus. Протокол HAST основан на аналоговой 4-20 мА технологии и имеет два варианта связи.
При первом варианте реализуется связь каждого прибора с контроллером по отдельной паре проводов, по которой могут проходить как аналоговый (например, 4...20 мА), так и цифровые сигналы,
Последние содержаг дополнительную информацию о работе прибора: диапазон и единицы измерения, дату калибровки, результаты самодиагностики и т.д.
При повторном варианте связи реализуется соединение ряда приборов с контроллером по одной паре проводов, в этом случае по паре проводов могут проходить только цифровые сигналы. Питание прибора осуществляется от блока питания контроллера по пой же паре проводов.
Основные характеристики сети: метод доступа - ведущий/ведомый (в сети может быть до двух ведущих узлов); физическая среда передач - последовательный порт RS-232C и витая кара; топология сети - зиезда (при соединении к контроллеру датчиков с аналоговыми выходными сигналами или шина (при цифровых выходных сигналах датчиков); режимы работы - асинхронный (кодирующий узел посылает зал tpoc, а ведомый - ответ или синхронный (когда ведомые узлы непрерывно передают свои данные ведущему узлу); при шинной архитектуре к сети может быть подключены 15 ведомых узлов (обычно подключают до восьми приборов); длила линии связи до 1500 м; скорость передачи данных 1200 бит/с; протокол HART реализует по общей модели числа, наименования и состава уровней любого протокола - модели OSI первый (физический), второй (канальный), седьмой (прикладной) уровни; команды от аедущих узлов могут быть трех видов: универсальные на лее ведомые узлы, типовые на многие узлы специфические на конкретные ведомые узлы.
Каждое сообщение от прибора может содержать информацию двух типов: текущие данные, статус прибора. Статус определяет оперативное состояние прибора: так называемый «нормальный последовательный статус», когда данные от него могут быть использованы для вычисления, управления; нормальный непоследовательный статус, когда данные от него корректны, но с прибором связана какая-то тревога; «неопределенный статус», когда данные не полностью корректны, но все же могут быть использованы; «плохой статус», когда данные не могут быть использованы.
Стандартная сеть PROFIBUS. Данная сеть (международный стандарт 1ЕС 6115S) получает все более широкое распространение среди европейских производителей средств автоматизации.
На полевом уровне сеть поддерживает два вида протоколов: протокол Profibus DP для быстрой коммуникации контроллеров с удаленными блоками вода/вывода и с интеллектуальными приборами; протокол Profibus РА, который используется для тех же делей" во взрывоопасных средах. Последний имеет иную физическую реализацию: безопасное низковольтное исполнение. По сети может передаваться цитание от контроллера к приборам, подключенным к сети.
Основные характеристики сети PROFIBUS: физически передача данных в сети осуществляется через порт RS-4S5 и экранированную витую пару, либо через оптоволоконный кабель; сеть обеспечивает любые виды соединений (шина, дерево, звезда, кольцо); метод доступа к сети - ведущий/ведомый: в сети возможно наличие нескольких веяуших устройств, общающихся между собою с помощью маркера; но модели OSI протокол сети использует первый (физический), второй (канальный), седьмой (прикладной) уровни; общее число устройств на сети до 126- из которых 32 узла могу! быть аедущими: скорость передачи данных на витой паре варьируется от 9.6 Кбиг/с до 1.5 Мбита/с (при протоколе Profibus РА скорость передачи данных на витой паре до 31 Кбит/с): длина сети на витой паре до 1.2 км или до 4.В км с повторителями, на оптоволокне - до 23 км.
Передаваемые устройствами диагностические сообщения имеют три уровня иерархии; диагностика всего устройства (например, упало напряжение литания), диагностика модуля устройства (например, отказал восьмикаъалыгай цифровой модуль выходных сигналов), диагностика канала (например, а канале А модуля Б не проходит сигнал). В сети реализована коррекция ошибок: в любой посылке данных три ошибочных бита будут обнаружены, а один ошибочный бит может быть восстановлен.
Стандартная сеть Foundation Fieldbus. В нее «ходят порядка 90% производителей средств и услуг в области автоматизации. Сейчас зга сеть включена в международный стандарт EEC 63158, принятый в 1999 г. И по многим далее перечисленным ее свойствам может считаться наиболее перспективной стандартной полевой сетью.
Сеть обеспечивает связь контроллеров с выносными блоками вводе/вывода и с интеллектуальными приборами при учете специфики работы приборов во взрывоопасной среде. По сети передается питание от контроллера к приборам, подключенным к сети.
Для более полного и рационального использования все возрастающей мощности микропроцессоров, встраиваемых в кшеллекгуальные приборы, применительно к сети Foundation Fieldbus, разработка специальная идеология Fieldbus Foundation, которая ставит своей целью перенос типовых алгоритмов переработки измерительной информации (фильтрации, масштабирования, линеаризации и т.п.), регулирования (стабилизации, слежения, каскадного управления и т.п.), логического управления пуска, остановка, блокировки группы механизмов в т.п.) на самый нижний уровень управления: уровень интеллектуальных датчиков и исполнительных механизмов. В соответствии с этой идеологией и стандарт Foundation Fcldbus внесены специальные правила работы и обмена информацией между интеллектуальными таборами в сети при учете, что каждый прибор в сети, кроме обычных функций аналого-цифрового или цифро-аналогового преобразования может реализовывать типовые функции контроля и управления.
Базовый вариант сети - Foundation Fieldbus HI (FT HI); он реализует безопасную работу приборов во взрывоопасной среде. Кроме него существует вариант Foundation fieldbus Н2 (FF Н2); близкий по характеристикам к варианту FF Ю, в котором специфика работы приборов во взрывоопасной среде не учитывается.
Основные характеристики сет» FF HI: топология сети - шина или дерево; физически передача данных в сети осуществляется через «орт RS-485 и экранированную витую пару; длина линии передачи - 1,9 км; скорость передачи данных - 31,25 Кбита/с; число подключаем их к сети устройств до 32; протокол сети использует три уровня по модели OSI: первый (физический уровень), второй (канальный уровень) и седьмой (прикладной уровень), а также добавочный пользовательский уровень, на котором фиксируется ряд важных функций и правил; метод доступа к сети - маркет; управление сетью может быть распределено между несколькими активными планировщиками связей, которые могут резервировать Друг друга; периодический цикл передачи информации с учетом отработки в приборах контуров управления составляет 50 мс; аналогично HART протоколу здесь используется понятие «статус», которое каждый цикл может передаваться каждым прибором по сети вместе с его данными.
В стандарт FF HI введен пользовательский уровень. Оп определяет связи, с помощью которых оператор может взаимодействовать с приборами либо через, так называемую, серию блоков, либо через описатели приборов.
Современные интеллектуальные датчики обеспечивают;
· резкое уменьшение искажений измерительной информации на пути от датчика к контроллеру, т.к. вместо низковольтного аналогового сигнала по кабелю, соединяющему датчики с контроллером, идут цифровые сигналы, на которые электрические и магнитные промышленные помехи оказывают несравнимо меньшее влияние;
· увеличение надежности измерения благодаря самодиагностике датчиков, тле. каждый датчик сам оперативно сообщает оператору факт и тип возникающего нарушения, тем самым, исключая использование дня управления некачественных и/или недостоверных измерении;
· возможность использования принципов измерения, требующих достаточно сложной вычислительной обработки выходных сигналов сенсора, но имеющий рад и ре имущее тв перед традиционно используемыми принципами измерения по точности, стабильности показаний, простота установки и обслуживания датчика в процессе его эксплуатации;
· возможность построения мулътисенсорных датчиков, в которых преобразователь получает и перерабатывает сигналы ряда однотипных или разнотипных чувствительных элементов;
· возможность проведения всей необходимой первичной переработки измерительной информации в датчике и выдачи им искомого текущего значения измеряемой величины в заданных единицах измерения;
· возможность передачи в систему автоматизации не только текущего значения измеряемой величины, но и добавочных сигналов о выходе его за пределы заданных норм, а также возможность передачи
· посети не каждого текущего измеряемого значении, а только изменившегося по сравнению с предыдущим значения, или вышедшего за пределы заданных норм значения, или значения, требующего управляющего воздействия;
· наличие в датчике базы данных для хранения значений измеряемой величины за заданный длительный интервал времени;
· возможность дистанционно с пульта оператора а оперативном режиме выбирать диапазон измерения датчика, устанавливать ноль прибора;
· возможность, путем программирования работы датчика на достаточно простом технологическом языке, реализовать в нем простые алгоритмы регулирования, программного у правлении, блокировок механизмов;
· возможность строить достаточно простые цепи регулирования, программного управления, блокировок на самом нижнем уровне управления из трех компонентов: интеллектуальных датчиков, полевой сети и интеллектуальных исполнительных механизмов, не загружая память вычислительными операциями контроллеры, что позволяет использовать мощность контроллеров для реализации в них достаточно сложных и совершенных алгоритмов управления.
В настоящее время наблюдаются следующие тенденции развития ИД. Развитие многофункциональных свойств датчика. Перспективные разработки ведутся по реализации в датчике функции прогнозирования значения измеряемой величины, по углублению текущей самодиагностики датчика и на ее базе по прогнозированию в самом датчике возможной некорректной его работы и по составлению рекомендаций по его обслуживанию, a также по адаптации шкалы датчика к диапазону изменения измеряемой величины. Кроме того, все больший объем задач по расчету показателей, по обнаружению заданных событий.
По реализации задач управления перекладываете я с контроллера на датчик. Ввиду этого сам термин «датчик» становится все более неполным и условным.
Миниатюризация датчика. Создание миниатюрных датчиков на базе ряда известных и частично новых методов измерения с использованием миниатюрных по размерам микропроцессоров позволяет выпускать промышленное оборудование с встроенными в него датчиками и создавать системы автоматического мониторинга работы машин и механизмов, кттгорые определяют текущий износ отдельных узлов оборудования и, следовательно, повышают надежность его работы и совершенствуют имеющуюся на предприятиях систему обслуживания н ремонта оборудования.
Расширение видов связи датчика с контроллером. В настоящее время датчик связывается с контроллером либо через самостоятельный проводной канал аналоговых сигналов, либо через общую для ряда датчиков цифровую проводную сеть. В случае значительною удаления датчиков от основных средств системы автоматизации датчик с помощью отдельных специальных средств телемеханики может общаться с контроллером по радиоканалу. В ряде фирм сейчас ведутся работы по созданию беспроводных датчиков, в которые встраиваются блоки коротковолновой радиосвязи (аналогичными блоками оснащаются и контролеры). Предпосылками развития указанных типов датчиков служат с одной стороны наблюдающееся снижение стоимости средств коротковолновой радиосвязи и повышение надежности работы этих средств, а с другой стороны возникающая экономия затрат на проводную связь, упрощение монтажа системы и расширение возможных мест установки датчиков.
Часто материалы, процессы изготовления или отдельные операции сенсорных технологам несовместимы с материалами, производственными процессами или эксплуатационными требованиями технологий, обеспечивающих «интеллектуальные» способности на основе микроэлектроники. Процесс тесной интеграции интеллекта а датчиках требует сочетания сметанных технологий изготовления интегральных схем с производственной технологией, применяемой при создании соответствующих датчиков.
При изготовлении ИД может возникнуть технологическая несовместимость в процессе интеграции.
Очевидный пример подобной технологической несовместимости -случай термопары. Рассчитанной' на работу в температурном диапазоне 300...500 "С. Не говоря уже о том, что большинство микроэлектронных устройств не могут работать при температурах выше 150 'С, материалы, используемые для создания термопар, как правило, несовместимы с материалами тщательно контролируемой высокой чистоты, используемыми в процессах создания кремниевой микроэлектроники. Ничтожные количества металлов, используемых обычно и термопарах, таких как хром, никель, железо, платина, медь и алюминий, могут сыграть роль легирующих примесей в полупроводниках. Присутствие микроскопических количеств этих металлов на некоторых стадиях изготовления микроэлектроники может испортить весь процесс.
В некоторых случаях интеллектуальные интерфейсы могут поддерживать желаемые сетевые возможности, не требуя от технологии изготовления датчиков технической совместимости.
Интеллектуальный интерфейс объединяет функциональные возможности схем обработки сигналов и сетевых схем в единый интерфейс ИД. который служит промежуточным звеном между сетью и датчиком.
Микросенсорные кластеры.
Одиночные интеллектуальные датчики весьма полезны во многих ситуациях. Однако очень часто для реализации некоторых функции
требуется множество датчиков, В таких случаях необходима интеграция группы датчиков с несколькими вспомогательными компонентами. В результате появляется микропроцессорный кластер. Компоненты микропроцессорный кластера изображены на рис,2.1.Необходимы семь составляющих: несколько сенсоров, интерфейсная электроника, микроконтроллер или другие средства вычисления, (с ассоциированной памятью), средства передачи информации и, возможно, получения команд или новых программ, источник питания, печатная плата и корпус. Наряду с концепцией микропроцессорного кластера имеет место и другой распространенный подход к многосеннсорным системам. Многие серийные системы имеют узлы, включающие большинство означенных функций, но сенсоры связаны между собой, а не интегрированы
В ближайшем будущем сети датчиков будут развиваться по двум, направлениям. Во-первых, появятся сенсорные кластеры с большими функциональными возможностями, более компактные и с меньшим энергопотреблением. Во-вторых, станут доступными усовершенствованные средства беспроводной передачи данных.
Сверхзадача искусственного интеллекта датч1ош - увеличение сю срока службы в метрологическом исправном состоянии
В качестве определяющего признака ИД предполагают принять наличие избыточности, обеспечивающей восприятие и переработку дополнительной информации и на этой основе выполнение функций метрологического самоконтроля.
Способность метрологическому самоконтролю позволяет ИД осуществлять функции самокоррекций и обеспечения живучести.
Одним из определяющих признаков ИД состоит в выполнении им, помимо основной функции, функции автоматического метрологического самоконтроля - контроля метрологической исправности.
Для повышения эффективности проектирования интеллектуальных датчиков необходимо создание баз данных, касающихся:
1. физических и химических процессов в чувствительных элементах датчиков, порождающих рост опасных составляющих погрешности;
2. динамики изменения погрешности датчиков на многолетнем интервале с учетом условий их эксплуатации;
3.методов испытаний, позволяющих выявлять производственные источники роста погрешности датчика
4. методов организации метрологического диагностического самоконтроля.
Интеллектуальные датчики - стратегическое направление в измерительной технике, гарантирующее значительный экономический эффект.
2.2 Устройство и работа некоторых современных датчиков
Устройство и работа датчиков «Сапфир-22МП»
Электронный блок ЭБ датчика смонтирован на одной плате, размещенной в корпусе прибора. Структурная схема электронного блока представлена на рис. 2.3.

Аналого-цифровой преобразователь АЦП преобразует выходное напряжение тензопреобразователя ТП в цифровой код. При этом обеспечивается исключение влияния тока питания ТП на результат преобразования и осуществляется эффективное подавление помех (в первую очередь промышленной частоты). АЦП управляется микропроцессором МП и имеет встроенную систему автоматической коррекции погрешностей. Кроме того, АЦП преобразует в код сигнал с ТП, несущий информацию о температуре. Этот код используется для автоматической цифровой коррекции температурных погрешностей измерительного блока, АЦП и цифроаналогового преобразователя ЦАП.
Микропроцессор МП управляет работой всех узлов электронного блока с учетом индивидуальных характеристик измерительного блока. Он производит коррекцию нелинейности функции преобразования и коррекцию температурных погрешностей всех звеньев датчика. Индивидуальные параметры звеньев, а также параметры требуемой функции преобразования датчика записываются и хранятся в запоминающем устройстве ЗУ. Записанные данные сохраняются при отключении энергопитания, поэтому при включении питания датчик сразу готов к работе. Скорректированный код передается в ЦАП, где преобразуется в унифицированный токовый выходной сигнал.
Особенностью датчиков «Сапфир-22МП» является применение специального пульта управления ПУ. Пульт универсален, что позволяет ему работать с любыми моделями датчиков Саифир-22МП. В него входит микропроцессор МП, клавиатура К и цифробуквенное индикаторное табло ИТ. ПУ предназначен для настройки, калибровки и контроля параметров датчика. Он представляет собой отдельное устройство с автономным питанием (батарея типа «Крона») и подключается к плате электронного блока датчика с помощью трехпроводной линии связи. Следует отметить, что ПУ не является аналогом коммуникатора (устройство ручного управления), который входит в комплект интеллектуальных датчиков модели 1151 фирмы Fisher-rosemount. В интеллектуальных датчиках коммуникатора подключается непосредственно в информационную линию (цепь 4...20 мА) и позволяет осуществлять обмен данными по HART протоколу. Цифровой и аналоговый сигналы передаются, но одной паре проводов, и обмен сообщениями между датчиком и коммутатором происходит путем простого наложения HART на токовую петлю. При этом не нарушаются условия взрывобезопасности
Устройство и работа датчиков «Сапфир-22Р»
Аналоговый электронный блок датчика спроектирован на новых принципах, схема блока защищена патентом Российской Федерации. Электронный блок унифицирован для всех моделей измерительных блоков системы и выполнен на одной плате с двухсторонним расположением элементов поверхностного монтажа и DIP-элементов. Сборка электронного блока осуществляется на самом современном технологическом оборудовании, сертифицированном по ISO 9002, со 100 % контролем как собственно сборки, так и электрических характеристик. Это значительно повышает качество и надежность датчиков в целом. Электронный блок полностью выполнен на радиоэлементах производства США и западной Европы. Структурная схема электронного преобразователя датчиков «Сапфир-22Р» представлена на рис.2.4.
Формирователь питающих и опорных напряжений и токов обеспечивает напряжения питания, опорные напряжения для схем сравнения и коммутации и ток питания чувствительного элемента измерительного блока.
Измерительный усилитель преобразует выходное напряжение чувствительного элемента измерительного блока в нормированный сигнал.
Корректор температурной погрешности «нуля» принимает информацию о температуре измерительного блока, и, используя опорные напряжения, обеспечивает «N точек излома температурной характеристики «Нуля», чем достигается глубокая коррекция температурной погрешности «нуля».
Корректор статической нелинейности измерительного блока, используя пороговую схему, которая обеспечивает «М» точек излома, аппроксимирует нелинейное выходное напряжение измерительного блока «М+1» линейными участками, каждый из которых имеет свой коэффициент ±Км и синтезирует линейное (с необходимой точностью, определяемой значением «М») выходное напряжение электронного блока.
Корректор температурной погрешности «диапазона», используя информацию об изменении температуры и опорные напряжения, обеспечивает «К» точек излома температурной характеристики «диапазон» и аппроксимирует температурную зависимость, чем достигается глубокая коррекция температурной погрешности «диапазона».
Коммутатор пределов измерения обеспечивает переключение пределов измерения 1:10.
Формирователь выходных токов электронного блока преобразует нормированное напряжение в выходной ток.
Элементы коммутации и потенциометры оперативной регулировки удобно и доступно расположены на плате электронного блока. Специальный канал в корпусе электронного блока служит для доступа к корректору «ноль тонко», позволяющему настраивать начальное значение выходного сигнала после монтажа датчика. В зависимости от назначения датчик имеет сальниковый кабельный вывод (основное исполнение), электрический разъем в исполнении «для АЭС» или специальный кабельный вывод для вида взрывозащиты «взрывонепроницаемая оболочка».
Для предотвращения несанкционированного доступа к токонесущим элементам взрывозащищенных датчиков служит пломбируемый винт.
Электронный блок позволяет осуществлять контроль выходного токового сигнала без разрыва цепи нагрузки при помощи миллиамперметра или вольтметра, которые подключаются к специальным тестовым клеммам. Клеммная колодка аналогична применяемым в системах «Сапфир-22» и «Сапфир-22М», т.к. используется корпус электронного блока от системы «Сапфир-22». Более того, это устройство привычно в эксплуатации для таких крупных потребителей, как АЭС.
При необходимости с помощью органов регулирования датчик может быть перенастроен на любое нижнее и верхнее предельное значения выходного сигнала и любой вид выходной характеристики.
Для датчиков, настроенных на любой «младший» предел измерения p/pmах<1, можно смещением начального значения выходного сигнала получить так называемый эффект «электронной линзы».
Допустим, по технологическому процессу необходимо контролировать давление в диапазоне от 9 до 10 кПа, что соответствует применению датчика этой модели. В этом случае датчик настраивается на «младший» верхний предел измерения – 1 кПа и начальное значение выходного сигнала смешается на давление 9 кПа. Тогда полное значение изменения выходного сигнала (например, 0...5 мА) будет соответствовать 10% шкалы изменения измеряемого параметра.
Устройство и работа датчика давления Gerabar S (Endress+Hauser)
Датчик представляет собой программируемое средство измерения. Настройка датчика осуществляется оперативно с помощью кнопок на самом датчике или удалено в программном режиме через интерфейс цифровой коммуникации. Измерительная информация отображается на аналого-цифровом жидкокристаллическом дисплее датчика, на мониторе компьютера, контроллере, устройстве регистрации.
Датчик представляет результаты измерения в различных единицах давления. В датчике производится самодиагностика и индикация неисправностей.
Устройство и работа Гидростатического датчика уровня Delta-pilot S (Endress+Hauser)
Датчик основан на измерении гидростатического давления столба жидкости. Уровнемер представляет собой программируемое средство измерения. Настройка датчика выполняется на месте с помощью 4-х кнопок самого датчика или дистанционно в программном режиме через интерфейс цифровой коммуникации.
В уровнемере производится самодиагностика и индикация неисправностей. Фирма Endress+Hauser выпускает интеллектуальные датчики расхода. Интеллектуальные датчики расхода также выпускают фирмы "PANA METRICS", «Теплоприбор».
Устройство и работа интеллектуального датчика температуры ТСТП
Датчик температуры ТСТП предназначен для измерения температуры различных газообразных, сыпучих и жидких сред.
ИД ТСТП измеряет температуру с помощью термометров сопротивления ТСМ, ТСП и термопреобразователей ТХА и преобразует аналоговый сигнал в цифровой.
С помощью последовательного интерфейса RS-485 можно одновременно подключить до 255 устройств в одной сети.
Датчик изготавливается ЗАО ПК «Промконтроллер».
Фирмой Siemens Schweiz разработана новая технология, реализующая концепцию интеллектуального встраивания датчиков в среду автоматизации.
Для коммуникации датчиков с децентрализованной периферией использована полевая шина Profibus DP, что позволило передавать параметры и данные диагностики па значительное расстояние от управляемой установки.
Предусмотрена настройка датчиков прямо из системы управления, что позволило отказаться от настройки каждого датчика в отдельности.
Новая технология обеспечивает автоматическую диагностику повреждений, в т.ч. обрыва проводов, короткого замыкания, наличия загрязнений и выхода из строя датчика.
Данные диагностики передаются по 2-проводной линии вместе с информацией о коммутационных состояниях.
Основу конструкции ИД тока (электроизмерительные клещи КЭИ-0,6) составляет кольцевой магнитопровод из феррита марки 2000 НМ и датчик Холла.
В датчике измеряется магнитное поле протекающего тока.
Внешне конструкция такого датчика практически не отличается от известных конструкций токоизмерительных клещей с разъемными губками, автономным питанием и индикацией значений тока на экране индикатора. Основным элементом электронной схемы подобного датчика является так называемый «пик-процессор» (ГШ). Это однокристальная микро-ЭВМ, которая и обеспечивает интеллектуальную часть клещей. ПИК-процессор обладает памятью EEPROM объемом 1Кх14 для записи программ, памятью EEPROM данных объемом 64x8, восьмиуровневым аппаратным стеком, четырьмя источниками прерываний; поддерживает АССЕМБЛЕР, состоящий всего из 35 словесных инструкций, и внутрисъемный эмулятор. Эти же инструменты поддерживает и IBM PC. Последнее позволяет разработать и отладить программу работы 1111 и IBM PC, записать ее в память ПП.
Использование ПП позволило существенно сократить число органов управления токовыми клещами, не ухудшая при этом основных параметров прибора. Так. Значительно упрощается процедура настройки клещей в процессе их изготовления, снижается погрешность измерения и т.д.
Но, самое главное, наличие в схеме электроизмерительных клещей такого ПП обеспечивает реализацию принципиально новых возможностей и, как следствие, расширение диапазона применения таких клещей, причем теперь для изменения алгоритма работы клещей, получения новых функций вовсе не нужно менять «железо», все это решается программно.
Конструктивные особенности клещей КЭИ-0,6. Простая механика, используемая в конструкции, позволяет легко раскрывать губки клещей левой рукой, при этом правая рука свободна для записи измеренных значений и других действий. На лицевой панели клещей расположен экран жидкокристаллического индикатора (ЖКИ), куда выводится мгновенное значение измеряемого тока или другие измеряемые параметры. Род измерений устанавливается ползунковым переключателем. Рядом находится миниатюрный кнопочный переключатель, с помощью которого можно запомнить максимальное значение измеряемого параметра.
В качестве автономного источника питания в клещах используется две пальчиковые батарейки на 9 В. Малое энергопотребление позволяет работать с одним комплектом батареек больше месяца непрерывно. В режиме «спячки» один комплект прослужит около года.
Измерение постоянного и переменного токов. Разработанные и предлагаемые для реализации клещи КЭП-0,6 предназначены для измерения постоянного, переменного и импульсного токов в диапазоне 0...600 А. Органы управления включают в себя движковый переключатель и две кнопки: «Уст. О» и «Память». Движковый переключатель устанавливает режим работ: измерение тока в амперах; измерение напряжения в вольтах, либо измерение тока в амперах, измерение температуры в градусах Цельсия.
Кнопки «память» позволяет запоминать последнее значение измеряемого параметра или находить его максимальное значение за определенный промежуток времени. Клещи КЭИ-0,6 включаются нажатием на любую из кнопок. Перед началом работы рекомендуется установить «О» нажатием на кнопку «Уст. О».
При измерении тока движковый переключатель устанавливается в положение «Ток, А». Теперь, чтобы измерить ток в шине, достаточно, разжав губки, пропустить шину в отверстие клещей. Жидкокристаллический индикатор покажет величину постоянного тока со знаком в старшем разряде либо действующее значение переменного тока (50 Гц) с соответствующим значком в старшем разряде.
Для запоминания величины тока в желаемый момент времени необходимо нажать на кнопку «Память» и отпустить ее. Если кнопку не отпускать, запомнится максимальное значение тока за время удержания кнопки.
Измерение напряжения или температуры. При измерении напряжения движковых переключателей устанавливается в положение «Напряжение, В». Клеммы на корпусе «I» и » предназначены для выносных кабелей со щупами. Манипуляция с кнопками такие же, как и для измерения тока.
При измерении температуры движковый переключатель устанавливается в положение «Температура». Окно термочувствительной области на губках клещей контактирует с предметом, температуру которого необходимо измерить. При этом на ЖКИ высвечивается температура в градусах Цельсия.
Дополнительные функции клещей КЭИ-0,6. Наличие программируемого ПП позволяет по требованию заказчиков расширить функциональные возможности клещей. Так, например, компенсируя нелинейность каждого конкретного датчика Холла путем задания функции преобразования для определенных клещей, можно в несколько раз снизить погрешность измерений. Используя напряжение как опорную величину, можно измерять угол сдвига между током и напряжением в цепи и т.д.
2.6 Российский рынок промышленных датчиков
Автоматические системы управления современным производством – это комплекс сложного многоуровневого оборудования, нацеленный на обеспечение максимальной производительности и высокого качества выпускаемой продукции. Взаимодействие систем управления с технологическими процессами при производстве продукции, контроль за параметрами, количеством и качеством продукта осуществляется различными датчиками и аналитическим оборудованием. Применение датчиков позволяет постоянно контролировать ход технологического процесса и оптимизировать его, что улучшает качество продукции и повышает конкурентоспособность производства. Рост цен на энергоносители и материалы повышает требования к их учету и эффективному использованию, а значит, и в этом случае возникает потребность в приборах учета.
В середине 90-х гг. в России началась активная модернизация производственного оборудования, установленного зачастую еще в 70-е и 80-е гг. Началось строительство новых производств с высоким уровнем автоматизации технологических процессов. Устойчивый рост промышленного производства в России начиная с 1999 г. означает в том числе и увеличение темпов внедрения современных технологий и систем управления.
Рост потребности в датчиках и аналитическом оборудовании происходит сейчас опережающими темпами по сравнению с общим ростом отраслей промышленности. Это связано с тем, что помимо создания новых производственных мощностей идет активная модернизация оборудования, установленного еще 20 или 30 лет назад и уже давно не отвечающего современным требованиям. Значительную долю занимает также плановая замена и ремонт датчиков на уже работающих производствах.
Ниже проводится анализ положения на российском рынке промышленных датчиков, перспективы развития и новинки сенсорных технологий.
Для простоты все типы датчиков и аналитического оборудования разделены по типу измеряемой величины и сгруппированы в пять разделов, смысл которых понятен интуитивно: огонь, воздух, вода, земля и человек.
Огонь. Датчики температуры, оптические датчики и датчики пламени
Датчики температуры, пожалуй, один из самых распространенных типов датчиков. Температуру необходимо измерять везде: в сталеплавильной печи, химическом реакторе или в квартире, в системе отопления. Используемые в промышленности датчики температуры можно разделить по типу измерения на контактные и бесконтактные датчики температуры. Бесконтактные датчики используют принцип измерения мощности инфракрасного излучения, идущего от каждого объекта, будь то расплавленный металл или кусок льда. Инфракрасное излучение с длиной волны 3–14 мкм от измеряемого объекта попадает на чувствительный элемент бесконтактного датчика температуры и преобразуется в электрический сигнал, который затем усиливается, нормируется, а в новых моделях датчиков и оцифровывается для передачи по сети.
Бесконтактные датчики температуры применяются там, где затруднен доступ к измеряемым деталям, а также необходима мобильность и малая инерционность измерений. Кроме того, бесконтактные датчики температуры незаменимы там, где необходимо измерять высокие температуры – от 1500 до 30007 С. К особому виду ИК-датчиков температуры можно отнести ИК-камеры, которые позволяют получать картину распределения температуры на поверхности измеряемого объекта. Современные технологии позволяют создать недорогие камеры без охлаждаемых и движущихся частей. Например, прибор Thermo View Ti30 производства Raytek, воспроизводящий изображения в ИК-спектре с разрешением 160x160 точек и точностью 2 % при температуре в диапазоне от 0 до 2507 С. Прибор имеет собственную память изображений и снабжен USB-портом для передачи их файлов в компьютер.
Интересны также модели бесконтактных датчиков температуры, разработанные для измерения температуры прозрачных объектов – стекла и пластиковой пленки, датчики для работы в запыленной или задымленной среде, датчики для измерения температуры пищевых продуктов в холодильных камерах.
Контактные датчики температуры – это прежде всего термопары и термосопротивления. Основным преимуществом данного типа датчиков является высокая точность измерения и их относительная дешевизна.
Наибольшее применение получили термопары Хромель-Копель (тип L) и Хромель-Алюмель (тип J). Эти типы термопар обеспечивают высокую точность и стабильность измерений в широком диапазоне температур.
Измерение температуры термосопротивлением основано на том, что такие материалы, как полупроводники и металлы изменяют свое электрическое сопротивление с изменением температуры. Полупроводниковые термосопротивления, обычно называемые термисторами, имеют среднюю точность и стабильность показаний, однако такие датчики весьма дешевы и применяются там, где отсутствует необходимость в высокой точности измерений. Напротив, термосопротивления с металлическим чувствительным элементом обеспечивают высокую точность и стабильность измерений. В качестве металлов для термосопротивлений используется платина, медь, реже никель.
Принцип измерения кремниевыми датчиками температуры основан на том, что кремний как полупроводник в значительной степени изменяет свое сопротивление с температурой. Поскольку кремний также применяется для производства интегральных микросхем, то такие датчики температуры могут иметь схемы усиления и обработки сигнала, схемы цифровых интерфейсов, позволяющие напрямую подключать датчик к компьютеру или микропроцессору.
Воздух. Датчики давления, датчики состава газа, датчики скорости потока и расхода газа
Приборы для измерения давления применяются практически во всех отраслях промышленности, особенно в машиностроении, химической, пищевой промышленности и энергетике. Датчики давления можно разделить на следующие несколько групп по типу измеряемого давления.
Датчики абсолютного давления. Точкой отсчета для них служит нулевое давление, т.е. вакуум. Такие датчики применяются в основном на химических, пищевых производствах, в фармацевтике – там, где параметры технологического процесса зависят от абсолютного значения давления. Измеряемое абсолютное давление обычно не превышает значения 50–60 бар.
Датчики относительного давления. Показания этих датчиков отсчитываются от значения внешнего атмосферного давления. Это наиболее распространенный тип датчиков давления. Датчики относительного давления измеряют давление в системах водоснабжения, различных трубопроводах и емкостях.
Датчики дифференциального давления. Датчики имеют два входа, и результатом измерений является разница давлений между этими входами. Эта разница может быть как положительной, так и отрицательной, однако некоторые модели датчиков дифференциального давления измеряют только односторонние изменения дифференциального давления. Датчики дифференциального давления применяются для контроля загрязнения фильтров при фильтрации газов или жидкостей. Они используются как датчики уровня жидкости при измерении уровня гидростатическим методом. С помощью датчиков дифференциального давления измеряется расход жидкости.
Датчики давления разделяются по типу используемого чувствительного элемента. Это разделение предъявляет существенные требования к областям применения датчиков давления.
Одним из первых типов датчика давления был датчик с чувствительным элементом емкостного типа (имеются в виду устройства, имеющие электрический выходной сигнал). Такие датчики применяются, например, в приборах для измерения кровяного давления. Датчики давления с емкостным чувствительным элементом обладают высокой точностью измерений, большим диапазоном и долговременной стабильностью. Например, датчики давления серии 3015 производства компании Rosemount обладают точностью измерения 0,15 %, долговременной стабильностью 0,125 % в течение пяти лет эксплуатации и перестраиваемым диапазоном 100:1.
Другим типом датчиков является датчик давления с чувствительным элементом в виде мембраны с закрепленными на ней тензодатчнками. Как правило, мембрана изготавливается из нержавеющей стали или другого стойкого металла. Тензодатчики обычно делают металлическими – из манганина или константана – или кремниевыми.
Относительно недавно стали широко использоваться датчики давления с мембраной из керамики, с пьезорезистивными датчиками. Датчики с такой мембраной имеют большую долговременную стабильность показаний и высокую устойчивость к перегрузкам давления. Развитие электроники позволяет в большей мере применять микропроцессорные технологии в системах обработки сигналов о датчиков давления, реализуя цифровые интерфейсы вывода информации с датчиков или их перестройку по диапазону. Датчики давления PF2057 производства IFM Electronic имеют керамическую фронтальную мембрану, позволяющую использовать их для измерения давления вязких сред и суспензий, а также в пищевой промышленности. Кроме токового выхода 4–20 мА датчик имеет пороговый транзисторный выход, светодиодный дисплей и может перестраиваться по диапазону в 4 раза.
Датчики состава газов применяются в химическом производстве для контроля за ходом технологического процесса, а также для мониторинга состояния атмосферы и обеспечения безопасности в производственных цехах и жилых помещениях.
Датчики, определяющие наличие и концентрацию взрывоопасных газов, таких как метан, пропан, водород, ацетилен, обычно используют каталитический принцип. В таких устройствах поверхность чувствительного элемента покрыта тонким слоем катализатора, в качестве которого может использоваться, например, платина, палладий или диоксид олова. Попадающий на слой катализатора газ окисляется кислородом воздуха и вызывает дополнительный нагрев этого слоя. Изменение температуры приводит к появлению электрического сигнала, который усиливается электронной схемой.
Датчики для определения концентраций токсичных газов, таких, например, как аммиак или сероводород, используют электрохимический принцип измерения. Газ поступает в измерительную ячейку, где под действием электрического тока происходит химическая реакция. Выбирая материал электродов и разделительной мембраны в измерительной ячейке, а также силу тока, можно добиться того, что в реакцию будет вступать только определенный газ, концентрацию которого необходимо измерить.
Третьим типом датчиков газа можно назвать ИК-датчики газа. Принцип измерений основан на поглощении газами определенных длин волн ИК-диапазона. Тот или иной газ поглощает лишь определенные длины волн и коэффициент поглощения пропорционален концентрации газа. ИК-датчики газа имеют ряд преимуществ, таких как долговременная стабильность, отсутствие чувствительности к другим газам, высокая точность. Несмотря на то что этот тип датчиков был разработан давно, его широкое применение сдерживалось высокой стоимостью оборудования. С появлением новых приемников и излучателей ИК-диапазона стоимость таких приборов приближается к стоимости обычных датчиков газа.
Вода. Датчики расхода, уровня жидкости, датчики анализа жидкости.
Электронные расходомеры можно четко разделить по принципу действия, причем каждый тип расходомеров имеет свои особенности и занимает соответствующую нишу на рынке.
Кориолисовы расходомеры используют физический принцип, открытый французским математиком Густавом Кориолисом, который показал, что при движении тела относительно вращающейся системы отсчета на него действует сила инерции. В кориолисовом расходомере расположены вибрирующие трубки, через которые идет поток жидкости. Частота вибрации пропорциональна массовому расходу жидкости. Этот тип расходомеров может работать как с жидкостями, так и с газами, и обеспечивает очень высокую точность измерений. Основной недостаток данных приборов - высокая стоимость.
Электромагнитные расходомеры используют принцип генерации электрического тока при движении проводника в магнитном поле. Из самого принципа ясно, что электромагнитные расходомеры измеряют расход только проводящих жидкостей. Однако высокая точность, устойчивость к тяжелым условиям эксплуатации, отсутствие перепада давлений и низкая стоимость приборов делает их незаменимыми там, где необходимо измерить расход воды или продуктов на водной основе. Электромагнитными расходомерами невозможно измерить расход непроводящих жидкостей, например нефтепродуктов, однако эти приборы хорошо подходят для измерения расхода вязких жидкостей или даже пастообразных веществ, например йогурта или творога в пищевой промышленности.
Ультразвуковые расходомеры используют ультразвук для измерения скорости потока жидкости или газа. Расход вычисляется путем измерения либо времени распространения ультразвука, либо изменения частоты ультразвуковых колебаний (эффект Доплера). Ультразвуковые расходомеры позволяют измерять расход как газов, так и жидкостей, независимо от их электропроводности.
Вихревые расходомеры используют принцип измерения расхода, основанный на том, что вокруг погруженного в поток жидкости тела появляются турбулентные завихрения, частота возникновения которых пропорциональна скорости потока. Вихревые расходомеры имеют среднюю точность измерений и не работают при слишком малых потоках жидкости. Однако эти приборы широко применяются, например, для измерения расхода пара.
Тепловые расходомеры измеряют перенос тепла потоком газа или жидкости от нагревателя к термочувствительному элементу. Тепловые расходомеры фиксируют массовый расход газов или жидкостей (в кг/час), как и кориолисовы датчики, в отличие от остальных, измеряющих объемный поток (в м3/час). Эти приборы имеют невысокую точность измерений, однако они могут работать при низких скоростях потока жидкостей или газов, где другие типы расходомеров неприменимы.
Земля. Датчики расстояния, наличия предметов, датчики положения и ориентации
Датчики расстояния, положения и наличия занимают центральное место в автоматизированных сборочных производствах, линиях по розливу и упаковке продуктов – то есть там, где необходимо определить наличие объекта или расстояние до него. Конкретный тип датчиков выбирается в зависимости от требований.
Индуктивные датчики определяют положение только металлических объектов. Причем, если ранние модели индуктивных датчиков были более чувствительными к деталям из железа и магнитных материалов, то в настоящее время выпускаются модели датчиков, имеющих одинаковую чувствительность как к черным, так и к цветным металлам. Совсем недавно появились и обратные датчики – чувствительные только к черным металлам. Например, модель IGC211 производства компании IFM Electronic. Такие датчики применяются, например, на конвейерах, где детали из латуни или дюраля не должны давать ложных срабатываний.
При необходимости определять положение неметаллических предметов выбираются емкостные, ультразвуковые или фотоэлектрические датчики. Емкостные датчики реагируют на изменения в электростатическом поле. Такие изменения вызывает практически любой предмет – будь то твердое вещество или жидкость. Однако расстояние, на котором работают емкостные датчики, невелико и составляет максимум 80 мм. Для измерения на больших расстояниях используются ультразвуковые датчики, измеряющих время, за которое ультразвук проходит расстояние от датчика до объекта и обратно.
Пожалуй, фотоэлектрические датчики наиболее разнообразны по своим характеристикам и сфере применения, однако их принцип работы одинаков. Излучаемый датчиком свет рассеивается, отражается или поглощается объектом, и эти изменения воспринимаются фотоприемником. Благодаря тому, что в последних моделях фотоэлектрических датчиков применяется микропроцессорная обработка сигнала, удалось воплотить новые функции приборов, среди которых – автоматическое обучение в процессе работы. Например, для того чтобы перенастроить датчики контрастных меток серии KT5G производства компании Sick нет необходимости останавливать технологическую линию, как это делалось ранее. Перенастройка прибора происходит в процессе работы. С другой стороны, многие функции датчиков, ранее доступные только для дорогих моделей, в настоящее время стали функционировать и в более дешевых изделиях. Примером тому являются датчики контрастных меток, стоимость которых снизилась в 2 - 3 раза.
Раздел 3. Первичные измерительные преобразователи температуры
интеллектуальный датчик преобразователь температура
3.1 Основные характеристики датчиков температуры
В этом разделе под термином датчик подразумевается преобразователь.
Любой датчик, в том числе и датчик температуры, может быть описан рядом характеристик, совокупность которых позволяет сравнивать датчики между собой и целенаправленно выбирать датчики, наиболее соответствующие конкретным задачам.
Перечислим основные из этих характеристик:
1. Функция преобразования (градуировочная характеристика) представляет собой функциональную зависимость ее выходной величины от измеряемой величины: y = f(x)
Зависимость представляется в именованных величинах: у – в единицах выходного сигнала или параметрах датчика, х – в единицах измеряемой величины. Для датчиков температуры – Ом/°С или мВ/К.
2. Чувствительность – отношение приращения выходной величины датчика к приращению его входной величины: S = dy/dx
Для линейной части функции преобразования чувствительность датчика постоянна. Чувствительность датчика характеризует степень совершенства процесса преобразования в нем измеряемой величины.
3. Порог чувствительности – минимальное изменение значения входной величины, которое можно уверенно обнаружить. Порог чувствительности связан как с природой самой измеряемой величины, так и с совершенством процесса преобразования измеряемой величины в датчике.
4. Предел преобразования – максимальное значение измеряемой величины, которое может быть измерено без необратимых изменений в датчике в результате рабочих воздействий. Верхний предел измерений датчика обычно меньше предела преобразования по крайней мере на 10 %.
5. Метрологические характеристики – определяются конструктивно-технологическими особенностями датчика, стабильностью свойств, применяемых в нем материалов, особенностями процессов взаимодействия датчика с измеряемым объектом.
Метрологические характеристики, в свою очередь, определяют характер и величины погрешностей измерения датчиков. Часть погрешностей могут быть случайными и они учитываются методами математической статистики. Систематические погрешности могут быть аналитически описаны и исключены из результатов измерения.
Основными видами систематических погрешностей являются:
- погрешности, обусловленные нелинейностью функции преобразования, что характерно для полупроводниковых датчиков температуры;
- погрешности, обусловленные вариацией функции преобразования вследствие изменения направления действия входной величины (для датчиков температуры это нагрев-охлаждение);
- погрешности, обусловленные несоответствием динамических возможностей датчика скорости воздействия входной величины. Может быть учтено введением коэффициента термической инерции;
- дополнительные погрешности, обусловленные отличием условий работы датчика от тех, в которых определялась его функция преобразования;
- погрешности, обусловленные нестабильностью функции преобразования вследствие процессов старения материала.
6. Надежность – рассматривается в двух аспектах: механическая надежность и метрологическая надежность.
7. Эксплуатационные характеристики – к их числу могут быть отнесены: масса, габаритные размеры, потребляемая мощность, прочность электрической изоляции, номиналы используемых электрических напряжений, а также стойкость к агрессивным средам, всевозможным излучениям, искробезопасность и т.д.
8. Стоимость и возможность серийного производства.
3.2 Основные типы полупроводниковых датчиков температуры
Влияние температуры на электрофизические параметры полупроводников в основном проявляются в изменении концентрации носителей заряда, что приводит к соответствующему изменению электрической проводимости. На этом принципе работают полупроводниковые терморезисторы. В качестве полупроводниковых датчиков температуры также используются диоды и транзисторы, где изменение концентрации носителей заряда приводит к изменению тока, протекающего через полупроводниковый прибор.
Термопреобразователи сопротивления
Принцип действия термопреобразователей сопротивления (терморезисторов) основан на изменении электрического сопротивления проводников и полупроводников в зависимости от температуры. Материал, из которого изготавливается такой датчик, должен обладать высоким температурным коэффициентом сопротивления, по возможности линейной зависимостью сопротивления от температуры, хорошей воспроизводимостью свойств и инертностью к воздействиям окружающей среды. В наибольшей степени всем указанным свойствам удовлетворяет платина; в чуть меньшей – медь.
Платиновые терморезисторы предназначены для измерения температур в пределах от – 260 до 1100 °С. В диапазоне температур от 0 до 650 °С их используют в качестве образцовых и эталонных средств измерений, причем нестабильность градуировочной характеристики таких преобразователей не превышает 0,001 °С.
Зависимость сопротивления платиновых терморезисторов от температуры определяется следующими формулами:
Rt = Ro(l + At + Bt2) при 0 < t < 650 °С;
Rt = Ro[l + At + Bt2 + Ct3(t – 100)] при – 200 < t < 0 °C,
где Rt – сопротивление терморезистора при температуре t, °С; Ro – сопротивление при 0°С; А = 3,96847*10-3 (0С)-1; В = -5,847*10-7(°С)-2; С = -4.22*10-12(0С)-4.
Платиновые терморезисторы обладают высокой стабильностью и воспроизводимостью характеристик. Их недостатками являются высокая стоимость и нелинейность функции преобразования. Поэтому они используются для точных измерений температур в соответствующем диапазоне.
Широкое распространение на практике получили более дешевые медные терморезисторы, имеющие линейную зависимость сопротивления от температуры:
Rt = Ro(l + at) при -50 < t <180 °С,
где а = 4.26*10-3(°С)-1.
Недостатком меди является небольшое ее удельное сопротивление и легкая окисляемость при высоких температурах, вследствие чего конечный предел применения медных термометров сопротивления ограничивается температурой 180 °С. По стабильности и воспроизводимости характеристик медные терморезисторы уступают платиновым.
Тепловая инерционность стандартных термометров сопротивления характеризуется показателем тепловой инерции (постоянной времени), значения которого лежат в пределах от десятков секунд до единиц минут. Постоянная времени специально изготавливаемых малоинерционных термометров сопротивления может быть уменьшена до 0,1 с.
Находят применение также никелевые термометры сопротивления. Никель имеет относительно высокое удельное сопротивление, но зависимость его сопротивления от температуры линейна только до температур не выше 100 °С, температурный коэффициент сопротивления никеля в этом диапазоне равен 6,9*10-3(°С)-1.
Медные и никелевые терморезисторы выпускают также из литого микропровода в стеклянной изоляции. Микропроволочные терморезисторы герметизированы, высокостабильны, малоинерционны и при малых габаритных размерах могут иметь сопротивления до десятков килоом.
По сравнению с металлическими терморезисторами более высокой чувствительностью обладают полупроводниковые терморезисторы (рис. 3.1).
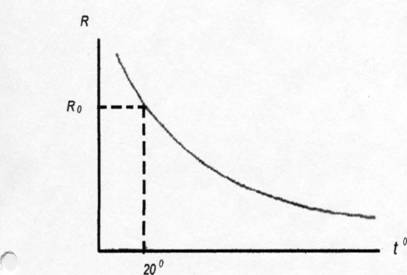
Они имеют отрицательный температурный коэффициент сопротивления, значение которого при 20 °С составляет (2–8)*10-2(°С)-1, т.е. на порядок больше, чем у меди и платины. Полупроводниковые терморезисторы при весьма малых размерах имеют высокие значения сопротивления (до 1 МОм). Для измерения температуры наиболее распространены полупроводниковые терморезисторы типов КМТ (смесь окислов кобальта и марганца) и ММТ (смесь окислов меди и марганца).
Термисторы имеют линейную функцию преобразования, которая описывается следующей формулой:
Rt = AeB/T,
где Т – абсолютная температура, А – коэффициент, имеющий размерность сопротивления, В - коэффициент, имеющий размерность температуры.
Серьезным недостатком термисторов, не позволяющим с достаточной точностью нормировать их характеристики при серийном производстве, является плохая воспроизводимость характеристик (значительное отличие характеристик одного экземпляра от другого).
Полупроводниковые датчики температуры обладают высокой стабильностью характеристик во времени и применяются для изменения температур в диапазоне от – 100 до 200 °С.
Измерительная схема с участием термопреобразователей сопротивления чаще всего является мостовой; уравновешивание моста осуществляется с помощью потенциометра. При изменении сопротивления терморезистора соответственно изменяется положение движка потенциометра, положение которого относительно шкалы формирует показание прибора; шкала градуируется непосредственно в единицах температуры. Недостатком такой схемы включения является вносимая проводами подключения терморезистора погрешность; поскольку из-за изменения сопротивления проводов при изменении температуры окружающей среды компенсация указанной погрешности невозможна, применяют трехпроводную схему включения проводов, при использовании которой сопротивления подводящих проводов оказываются в различных ветвях, и их влияние значительно уменьшается.
На рис.3.2 приведены схемы соединений внутренних проводников ТС с ЧЭ и их условные обозначения.
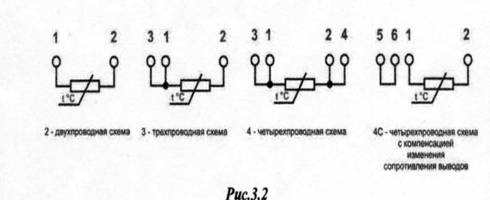
При использовании схемы 2 (двухпроводная схема) сопротивление соединительных проводов ТС не должно превышать 0,1 % номинального значения сопротивления термопреобразователя при 0°С. В двухпроводной схеме к сопротивлению ЧЭ добавлено сопротивление соединительных проводников, что приводит к сдвигу характеристики при 0°С и уменьшению W100.
На практике эта проблема решается за счет измерительного прибора, к которому подключается ТС, путем задания соответствующих корректировок по смещению и наклону характеристики.
Термопреобразователь с двухпроводной схемой подключения внутренних проводников может подключаться к прибору по трехпроводной схеме с использованием трехжильного кабеля.
При использовании термопреобразователей сопротивления с трехпроводной схемой подключения, прибор автоматически вычитает из сопротивления полной цепи сопротивление соединительных проводов. Сопротивление внутренних проводов и жил кабеля при этом должны быть между собой одинаковы.
Если входная электрическая схема прибора представляет собой мост, в одно плечо которого подключается ТС, то достаточно, чтобы были одинаковы сопротивления двух проводов: 1 и 2.
Наиболее точные ТС имеют четырехпроводную схему подключения. Для этой схемы не требуется равенство в сопротивлениях проводников. Каждый конкретный тип термопреобразователя имеет свой более узкий по сравнению с приведенным в таблице основных характеристик диапазон измеряемой температуры. Это связано с технологией сборки ТС и применяемыми при этом материалами.
Необходимо помнить, что для точного измерения температуры вся погружаемая часть ТС должна находиться в измеряемой среде.
На рис.3.4. показана одна из конструкций термопреобразователя сопротивления.
Платиновая проволока 1 намотана бифилярно на слюдяной каркас 2, на котором имеются мелкие зубцы. Для изоляции провод закрывается с обеих сторон слюдяными пластинами 3. Для улучшения условий теплообмена чувствительного элемента со средой применяются пластинки 4 С-образного сечения из фольги. Пластинки 2, 3 и 4 скрепляются и плотно вставляются внутрь кожуха 5. Выводы выполняются из серебряной ленты или проволоки и вьюодятся в клеммную коробку 7. С помощью гайки 6 термометр сопротивления крепится к корпусу.
Термоэлектрические преобразователи (термопары)
Принцип действия термопар основан на термоэлектрическом эффекте, заключающемся в том, что в замкнутом контуре, состоящем из двух разнородных проводников (или полупроводников), течет ток, если места спаев проводников имеют различные температуры. Если взять замкнутый контур, состоящий из разнородных проводников (термоэлектродов), то на их спаях возникнут термоЭДС E(t) и E(to), зависящие от температур этих спаев t и to. Так как эти термоЭДС оказываются включенными встречно, то результирующая термоЭДС, действующая в контуре, равна E(t) – E(to).
При равенстве температур обоих спаев результирующая термоЭДС равна нулю. Спай, погружаемый в контролируемую среду, называется рабочим концом термопары, а второй спай – свободным.
У любой пары однородных проводников значение результирующей термоЭДС зависит только от природы проводников и от температуры спаев и не зависит от распределения температуры вдоль проводников. Термоэлектрический контур можно разомкнуть в любом месте и включить в него один или несколько разнородных проводников. Если все появившиеся при этом места соединений находятся при одинаковой температуре, то результирующая термоЭДС, действующая в контуре, не изменяется. Это используется для измерения термоЭДС термопары. Создаваемая термопарами ЭДС сравнительно невелика: она не превышает 8 мВ на каждые 100 °С и обычно не превышает по абсолютной величине 70 мВ.
Термопары позволяют измерять температуру в диапазоне от –200 до 2200 °С. Для измерения температур до 1100 °С используют в основном термопары из неблагородных металлов, для измерения температур от 1100 до 1600 °С – тер-мопары из благородных металлов и сплавов платиновой группы, а для измерения более высоких температур – термопары из жаростойких сплавов (на основе вольфрама).
Наибольшее распространение для изготовления термоэлектрических преобразователей получили платина, платинородий, хромель, алюмель.
При измерениях температуры в широком диапазоне учитывается нелинейность функции преобразования термоэлектрическогго преобразователя. Так, например, функция преобразования медьконстантановых термопар в диапазоне температур от –200 до 300 °С с погрешностью ± 2 мкВ описывается эмпирической формулой
Е = At2 + Bt + С,
где А, В и С – постоянные, определяемые путем измерения термоЭДС при трех известных температурах, t – температура рабочего спая при °С.
Постоянная времени термоэлектрических преобразователей зависит от их конструкции и качества теплового контакта рабочего спая термопары со средой и для промышленных термопар исчисляется в минутах. Однако известны конструкции малоинерционных термопар, у которых постоянная времени лежит в пределах 5–20 секунд и ниже.
Электроизмерительный прибор (милливольтметр) или измерительный усилитель термоЭДС могут подключаться к контуру термопары двумя способами: в свободный конец термопары или в один из термоэлектродов; выходная термоЭДС от способа подключения измерительных устройств не зависит.
Как указано выше, при измерении температуры свободные концы термопары должны находиться при постоянной температуре, но как правило, свободные концы термопары конструктивно выведены на зажимы на ее головке, а следовательно, расположены в непосредственной близости от объектов, температура которых измеряется. Чтобы отнести эти концы в зону с постоянной температурой, применяются удлиняющие провода, состоящие из двух жил, изготовленных из металлов или сплавов, имеющих одинаковые термоэлектрические свойства с термоэлектродами термометра.
Для термопар из неблагородных металлов удлиняющие провода изготавливаются чаще всего из тех же материалов, что и основные термоэлектроды, тогда как для датчиков из благородных металов в целях экономии удлиняющие провода выполняются из материалов, развивающих в паре между собой в диапазоне температур 0–150 °С ту же термоЭДС, что и электроды термопары. Так, для термопары платина – платинородий применяются удлинительные термоэлектроды из меди и специального сплава, образующие термопару, идентичную по термоЭДС термопаре платина-платинородий в диапазоне 0–150 °С. Для термопары хромель – алюмель удлинительные термоэлектроды изготавливаются из меди и константана, а для термопары хромель – копель удлинительными являются основные термоэлектроды, но выполненные в виде гибких проводов. При неправильном подключении удлинительных термоэлектродов возникает существенная погрешность.
В лабораторных условиях температура свободных концов термопары поддерживается равной 0 °С путем помещения их в сосуд Дьюара, наполненный истолченным льдом с водой. В производственных условиях температура свободных концов термопары обычно отличается от 0 °С. Так как градуировка термопар осуществляется при температуре свободных концов 0 °С, то это отличие может явиться источником существенной погрешности; для уменьшения указанной погрешности, как правило, вводят поправку в показания термометра. При выборе поправки учитываются как температура свободных концов термопары, так и значение измеряемой температуры (это связано с тем, что функция преобразования термопары нелинейна); это затрудняет точную коррекцию погрешности.
На практике для устранения погрешности широкое применение находит автоматическое введение поправки на температуру свободных концов термопары. Для этого в цепь термопары и милливольтметра включается мост, одним из плеч которого является медный терморезистор, а остальные образованы манганиновыми терморезисторами. При температуре свободных концов термопары, равной 0 °С, мост находится в равновесии; при отклонении температуры свободных концов термопары от 0 °С напряжение на выходе моста не равно нулю и суммируется с термоЭДС термопары, внося поправку в показания прибора (значение поправки регулируется специальным резистором). Вследствие нелинейности функции преобразования термопары, полной компенсации погрешности не происходит, но указанная погрешность существенно уменьшается.
В лабораторных условиях для точного измерения термоЭДС применяются лабораторные и образцовые компенсаторы постоянного тока с ручным уравновешиванием.
Пирометры
Серьезным недостатком рассмотренных выше термопреобразователей сопротивления и термоэлектрических преобразователей является необходимость введения датчика в контролируемую среду, в результате чего происходит искажение исследуемого температурного поля. Кроме того, непосредственное воздействие среды на датчик ухудшает стабильность его характеристик, особенно при высоких и сверхвысоких температурах и в агрессивных средах. От этих недостатков свободны пирометры – бесконтактные датчики, основанные на использовании излучения нагретых тел.
Тепловое излучение любого тела можно характеризовать количеством энергии, излучаемой телом с единицы поверхности в единицу времени и приходящейся на единицу диапазона длин волн. Такая характеристика представляет собой спектральную плотность и называется спектральной светимостью (интенсивностью монохроматического излучения).
Законы температурного излучения определены совершенно точно лишь для абсолютно черного тела. Зависимость спектральной светимости абсолютно черного тела от температуры и длины волны выражается формулой:
Ra = Aa-5(eB/(aT) – l)-1,
где a – длина волны, Т – абсолютная температура, А и В – постоянные.
Интенсивность излучения любого реального тела всегда меньше интенсивности абсолютно черного тела при той же температуре. Уменьшение спектральной светимости реального тела по сравнению с абсолютно черным учитывают введением коэффициента неполноты излучения; его значение различно для разных физических тел и зависит от состава вещества, состояния поверхности тела и других факторов.
Использующие энергию излучения нагретых тел пирометры делятся на радиационные, яркостные и цветовые.
Радиационные пирометры используются для измерения температуры от 20 до 2500 °С, причем прибор измеряет интегральную интенсивность излучения реального объекта; в связи с этим при определении температуры необходимо учитывать реальное значение коэффициента неполноты излучения.
В типичный радиационный пирометр входит телескоп, состоящий из объектива и окуляра, внутри которого расположена батарея из последовательно соединенных термопар. Рабочие концы термопар находятся на платиновом лепестке, покрытом платиновой чернью. Телескоп наводится на объект измерения так, чтобы лепесток полностью перекрывался изображением объекта и вся энергия излучения воспринималась термобатареей. ТермоЭДС термобатареи является функцией мощности излучения, а следовательно, и температуры тела.
Радиационные пирометры градуируются по излучению абсолютно черного тела, поэтому неточность оценки коэффициента неполноты излучения вызывает погрешность измерения температуры.
Яркостные (оптические) пирометры используются для измерения температур от 500 до 4000 °С. Они основаны на сравнении в узком участке спектра яркости исследуемого объекта с яркостью образцового излучателя
(фотометрической лампы). Фотометрическая лампа встроена в телескоп, имеющий объектив и окуляр. При измерении температуры телескоп направляют на исследуемое тело и добиваются четкого изображения тела и нити фотометрической лампы в одной плоскости. Затем, изменяя яркость нити путем изменения тока через нее (или изменяя яркость изображения тела с помощью перемещаемого оптического клина), добиваются одинаковой яркости изображения нити и исследуемого объекта. Если яркость тела больше яркости нити, то нить видна в виде черной линии на ярком фоне. В противном случае заметно свечение нити на более бледном фоне. При равенстве яркостей нить не видна, поэтому такие пирометры называют также пирометрами с исчезающей нитью.
Напряжение накала лампы (или положение оптического клина) характеризует температуру нагретого тела; для сравнения интенсивностей излучения лишь в узком диапазоне спектра используется специальный светофильтр.
Яркостные пирометры обеспечивают более высокую точность измерений температуры, чем радиационные. Их основная погрешность обусловлена неполнотой излучения реальных физических тел и поглощением излучения промежуточной средой, через которую производится наблюдение.
Цветовые пирометры основаны на измерении отношения интенсивностей излучения на двух длинах волн, выбираемых обычно в красной или синей части спектра; они используются для измерения температуры в диапазоне от 800 до °С. Обычно цветовой пирометр содержит один канал измерения интенсивности монохроматического излучения со сменными светофильтрами.
Главным преимуществом цветовых пирометров является то, что неполнота излучения исследуемого объекта не вызывает погрешности изменения температуры. Кроме того, показания цветовых пирометров принципиально не зависят от расстояния до объекта измерения, а также от коэффициента
излучения в промежуточной среде, если коэффициенты поглощения одинаковы для обеих длин волн.
Кварцевые термопреобразователи
Для измерения температур от –80 до 250 °С часто используются так называемые кварцевые термопреобразователи, использующие зависимость собственной частоты кварцевого элемента от температуры. Работа данных датчиков основана на том, что зависимость частоты преобразователя от температуры и линейность функции преобразования изменяются в зависимости от ориентации среза относительно осей кристалла кварца.
Кварцевые термопреобразователи имеют высокую чувствительность (до 103 Гц/К), высокую временную стабильность (2*10-2 К/год) и разрешающую способность 10-4 – 10-7 К, что и определяет перспективность. Данные датчики широко используются в цифровых термометрах.
Шумовые датчики
Действие шумовых термометров основано на зависимости шумового напряжения на резисторе от температуры. Данная зависимость определяется формулой:
![]()
где ![]() – средний квадрат напряжения
шума, К – постоянная Больцмана, Т –абсолютная температура, R – сопротивление
резистора,
– средний квадрат напряжения
шума, К – постоянная Больцмана, Т –абсолютная температура, R – сопротивление
резистора, ![]() –
полоса воспринимаемых частот.
–
полоса воспринимаемых частот.
Практическая реализация метода измерения температуры на основе шумовых резисторов заключается в сравнении шумов двух идентичных резисторов, один из которых находится при известной температуре, а другой – при измеряемой. Шумовые датчики используются, как правило, для измерения температур в диапазоне –270 – 1100 °С.
Достоинством шумовых датчиков является принципиальная возможность измерения термодинамической температуры на основе указанной выше закономерности. Однако это значительно осложняется тем, что среднее квадратическое значение напряжения шумов очень трудно измерить точно вследствие его малости и сопоставимости с уровнем шума усилителя.
ЯКР-датчики
ЯКР-термометры (термометры ядерного квадрупольного резонанса) основаны на взаимодействии градиента электрического поля кристаллической решетки и квадрупольного электрического момента ядра, вызванного отклонением распределения заряда ядра от сферической симметрии. Это взаимодействие обусловливает прецессию ядер, частота которой зависит от градиента электрического поля решетки и для различных веществ имеет значения от сотен килогерц до тысяч мегагерц. Градиент электрического поля решетки зависит от температуры, и с повышением температуры частота ЯКР снижается.
Датчик ЯКР-термометра представляет собой ампулу с веществом, заключенную внутрь катушки индуктивности, включенной в контур генератора. При совпадении частоты генератора с частотой ЯКР происходит поглощение энергии от генератора. Погрешность измерения температуры –263 °С составляет ± 0.02 °С, а температуры 27 °С – ± 0.002 °С.
Достоинством ЯКР-термометров является его неограниченная во времени стабильность, а недостатком – существенная нелинейность функции преобразования.
Динамометрические преобразователи
Динамометрические (объемные) датчики измерения температуры основаны на явлении расширения (сжатия) твердых тел, жидкостей или газов при увеличении (уменьшении) температуры.
Температурный диапазон работы преобразователей, основанных на расширении твердых тел, определяется стабильностью свойств материалов при изменении температуры. Обычно с помощью таких преобразователей измеряют температуры в диапазоне –60–400 °С. Погрешность преобразования составляет 1–5 %. Температурный диапазон работы преобразователя с расширяющейся жидкостью зависит от температур замерзания и кипения последней (для ртути – –39–357 °С, для амилового спирта – –117–132 °С, для ацетона – –94–57 °С. Погрешности жидкостных преобразователей составляют 1–3 % и в значительной степени зависят от температуры окружающей среды, изменяющей размеры капилляра. Нижний предел измерения преобразователей, использующих в качестве рабочей среды газ, ограничивается температурой сжижения газа ( –195 °С для азота, –269 °С для гелия), верхний же – лишь теплостойкостью баллона.
Акустические датчики
Акустические термометры основаны на зависимости скорости распространения звука в газах от их температуры и используются в основном диапазоне средних и высоких температур. Акустический термометр содержит пространственно разнесенные излучатель акустических волн и их приемник, обычно включаемые в цепь автогенератора, частота колебаний которого меняется с изменением температуры; обычно такой датчик использует и различного типа резонаторы.
Раздел 4. Расчет общих факторов температурных измерений и термопреобразователей сопротивления
Температурные шкалы
По современным представлениям температура – это условная статистическая величина, прямо пропорциональная средней кинетической энергии частиц вещества (молекул либо, при атомарной структуре, атомов).
Представление о порядке величин могут дать следующие данные. В 1 мл газа при атмосферном давлении содержится 2,7 х 1019 молекул, имеющих размеры порядка 10-8см. Они движутся при комнатной температуре со средней скоростью около 1 км/сек и пробегают между столкновениями примерно 10-6см.
Еще Кельвин показал, что если одному какому-либо значению средней кинетической энергии частиц присвоить определенное число градусов, то ее достаточно для построения линейной бесконечной температурной шкалы от абсолютного нуля. Тогда равным приращениям средней кинетической энергии частиц будет соответствовать одинаковое приращение числа градусов температуры. Прямая, изображающая такую шкалу в системе координат температура – энергия, проходит через начало координат, так как абсолютному нулю температур соответствует нулевая скорость частиц и нулевая средняя кинетическая энергия.
Количественная связь предложенной Кельвином шкалы температур с средней кинетической энергией частиц выражается уравнением
![]()
отсюда
![]() ,
,
где m, v – средние масса и скорость частиц;
Т – абсолютная температура;
к – постоянная Больцмана, равная 1,38-Ю-23 дж/град.
В качестве реперной точки шкалы Кельвина принята в настоящее время температура равновесия между твердой, жидкой и парообразной фазами чистой воды при нормальных условиях. Этой точке присвоено число градусов, равное 273,16°К.
Для практических целей употребляется Международная практическая температурная шкала 1948 г. Температуры по ней выражаются в градусах Цельсия, обозначаемых °С. За нуль принята точка таяния льда, лежащая ниже «тройной точки воды» всего на 0,01° С.
Для пересчета температуры, выраженной в градусах 100-градусной шкалы, на значения температуры по международной термодинамической шкале следует пользоваться равенством Т°К = t°C + 273,15,
где Т и t – условные обозначения температуры, измеренной в градусах Кельвина и градусах Цельсия.
В шкале Фаренгейта (обозначение °Р) точка таяния льда обозначена 32° F, точка кипения воды 212° F; расстояние между ними разбито на 180 равных частей. За нуль шкалы принята температура холодильной смеси определенного состава. Шкала применяется в США, Австралии и Канаде.
Теплообмен среды и термометра
Любой измеритель температуры независимо от его конструкции часто называют термометром. При измерении температуры среды путем
погружения в нее какого-либо термометра он всегда измеряет только свою собственную температуру. Будет ли температура термометра равна температуре среды, близка к ней или же разница температур будет значительной, зависит от многих условий. Поэтому при монтаже измерителя температуры необходимо убедиться в том, что условия измерения обеспечивают минимально возможную разность между температурой среды и термометра.
Основные факторы теплообмена между средой и погруженной в нее частью термометра при промышленных измерениях следующие:
а) влияние теплового потока по арматуре термометра (т. е. влияние теплопроводности);
б) влияние лучеиспускания;
в) влияние положения измерителя температуры относительно потока среды;
г) динамические погрешности из-за тепловой инерции.
Влияние теплопроводности
Если измеритель температуры погружен в среду целиком, то через него не подводится и не отводится тепло к месту измерения.
В большинстве случаев термопреобразователь сопротивления находится на границе двух сред с разными температурными полями. Поэтому сам термопреобразователь или соприкасающиеся с ним элементы являются каналом теплообмена.
Теплообмен термопреобразователя с измеряемой средой зависит также от условий обтекания, микрогеометрии и цвета поверхности, интенсивности лучистого теплообмена и других конкретных условий.
Существенное значение имеют также масса, поверхность и теплоемкость самого термопреобразователя, определяющие его тепловую инерцию.
Сложный динамический характер теплового взаимодействия термопреобразователя и среды определяет величину погрешности собственно датчика.
Значительные погрешности возникают в термопреобразователях, помещенных в металлический чехол или гильзу. На рис.4.1. показан случай измерения термометром, погруженным в гильзу.
Рассмотрим возникающую здесь погрешность. Обозначим: tн – истинная температура среды; t1 – температура в конце гильзы (показание термометра); t0 –температура гильзы у ее верха; 1 – длина гильзы, м; а – коэффициент теплоотдачи от среды к гильзе, ккал/м2 • ч • град; l – коэффициент теплопроводности материала гильзы, ккал/м * ч • град; f – площадь поперечного сечения гильзы, м2; U = pd, где d – наружный диаметр гильзы, м.
Обозначим ![]() через m,
через m,
тогда
![]()
Влияние лучеиспускания
При измерениях в газовых средах часто вблизи термопреобразователя находятся поверхности, температура которых заметно отличается от температуры преобразователя. В этом случае между этими поверхностями и термометром происходит лучистый теплообмен, описываемый законом Стефана-Больцмана. Если температура окружающих поверхностей выше температуры термометра, то термометр получит путем лучеиспускания дополнительное количество тепла и тепловое равновесие будет поддерживаться на более высоком уровне.
Наличие лучеиспускания всегда вносит погрешность в измерения температур, но устранить его полностью зачастую оказывается сложно.
Рассмотрим влияние лучеиспускания на термометр, погруженный в трубопровод (рис.4.2.). Считая, что тепловое равновесие установилось, обозначим:
tср – температура среды в трубопроводе, °С;
tт – температура термометра, °С;
tст – температура стенки трубы, °С;
Соответствующие абсолютные температуры (t+273,15) обозначим через Тср; Тт; Тст (0К).
 ,
,
где a1, – коэффициент теплоотдачи от среды к термометру, ккал/м2*час*град;
С1 – константа лучеиспускания для материала чехла термометра, ккал/м2*ч*град4.
Влияние скорости потока
В неподвижной среде недостаточный теплообмен среды с термометром может быть источником погрешностей измерения. Наличие интенсивного омывания чувствительной части термометра потоком способствует правильному измерению. Можно в среднем считать, что для умеренных скоростей (примерно до 70 м/сек)
![]()
где а – коэффициент теплоотдачи от среды к чехлу термометра ккал/м2*ч*град;
к – коэффициент пропорциональности;
V – скорость среды, м/сек.
Следовательно, увеличение скорости среды, например, вдвое
повысит коэффициент теплоотдачи а на ![]() , т.е. на 41 %
, т.е. на 41 %
Обозначим дополнительно: Q – отвод тепла от термометра во внешнюю среду, ккал/сек;
k1 – коэффициент пропорциональности; F – поверхность термометра, погруженная в среду, м2;
tc – температура среды, °С;
t – температура термометра, °С.
В установившемся состоянии ![]() .
.
В настоящее время в технике все чаще применяются очень большие скорости потоков, приближающиеся к скорости звука в среде и превосходящие ее. В этих случаях начинает появляться нежелательное влияний скорости потока. Ударяясь о поверхность термоприемника, часть потока тормозится, и ее кинетическая энергия переходит в тепло, увеличивающее температуру теплоприемника т.е. создается состояние, когда t>t|c.
Эта разность температур выражается:
![]() ,
,
где g – ускорение земного тяготения, м/сек2; I – механический эквивалент тепла (426,4 кг/*м/ккал); ср – теплоемкость среды; r – коэффициент пропорциональности.
Влияние инерции
Погрешности в показаниях термометров от тепловой инерции могут быть сведены к трем случаям.
Первый случай – погружение термометра в более холодную или горячую среду постоянной температуры (рис.4.4, а). Погрешность вначале очень велика, но через некоторое время уменьшается до малой величины. Время, которое следует выждать до отсчета, может быть определено аналитически.
Второй случай (рис.4.4,б) – когда среда изменяет свою температуру на определенную величину с большей скоростью, чем термоприемник. Во время переходного процесса возникает временная погрешность в показаниях, которая затем исчезает. Величина этой погрешности зависит от инерционных свойств термоприемника.
Третий случай – когда температура среды изменяется по периодическому закону либо колеблется непрерывно по произвольному закону (рис. 4.4,в).
Г.М. Кондратьев создал теорию, позволяющую вычислить запаздывание в показаниях любого термометра.
Пусть Ф – отношение тепла, аккумулированного чувствительной частью термометра на 1°С к ее поверхности, т.е.
![]() ,
,
где V – объем чувствительной части термометра, см3;
y – плотность материала, г/см3;
с – теплоемкость, кал/г;
S – поверхность, см2.
Тогда
![]() ,
,
где а – коэффициент теплоотдачи от среды, ккал/м2*ч*град;
![]() – показатель тепловой инерции
термометра, мин;
– показатель тепловой инерции
термометра, мин;
![]() – переводной коэффициент для
размерностей.
– переводной коэффициент для
размерностей.
4.2 Расчет термопреобразователей сопротивления
Отклонение характеристики термопреобразователя сопротивления от стандартной
Температурная характеристика термометра сопротивления может
отличаться от градуировочной таблицы в зависимости от точности подгонки
сопротивления термометра при нулевой температуре и от чистоты металла термосопротивления.
Чистоту металла принято определять отношением ![]() , где R100 и R0 сопротивления термометра соответственно при 100 и 0°С.
, где R100 и R0 сопротивления термометра соответственно при 100 и 0°С.
Допустимые отклонения R0 и ![]() , от номинального значения,
установленные для технических термометров, приведены в табл. 4.1. Влияние этих
допустимых отклонений на результат измерения сказывается тем больше, чем выше
измеряемая температура (табл. 4.2).
, от номинального значения,
установленные для технических термометров, приведены в табл. 4.1. Влияние этих
допустимых отклонений на результат измерения сказывается тем больше, чем выше
измеряемая температура (табл. 4.2).
Для платиновых термометров сопротивления II класса ошибка при температуре 500°С может быть до 2,5°С.
Подбор терморезисторов
Терморезисторы обычно подбирают по номинальному значению
сопротивления при температуре 20°С (R20) – Температурная
характеристика терморезистора описывается выражением ![]() ,
,
где R20 – начальное сопротивление терморезистора при температуре 20°С
e – основание натуральных логарифмов;
В – постоянный коэффициент, °К;
Т – температура, °К. Промышленность выпускает терморезисторы с допуском на начальное сопротивление R20 ±20 %, на температурный коэффициент ±8 % и на коэффициент температурной характеристики В ±17 %.
Для подбора полупроводниковых терморезисторов с одинаковыми характеристиками необходимо измерить, их сопротивление при 20° С – R20 и при 100°C (R100).
По значениям R20 и R100 можно также
рассчитывать и строить температурные характеристики ![]() , Коэффициент В определяется по
формуле
, Коэффициент В определяется по
формуле
![]()
Влияние температуры окружающей среды
Провода, соединяющие термометр сопротивления с измерительным прибором, изготовляются обычно из меди. При изменении температуры окружающей среды их сопротивление меняется. Это вносит дополнительную погрешность в результаты измерения. Чтобы избежать появления этой погрешности часто применяют трехпроводную схему включения термометра сопротивления.
Каждый из соединительных проводов в этом случае оказывается включенным в противоположное плечо моста. Изменение сопротивления проводов приводит к изменению сопротивления обоих противоположных плеч. Полностью влияние соединительных проводов при трехпроводной схеме устраняется только в случае, если сопротивления обеих соединительных линий одинаковы и мост симметричный, т. е. R1=R2. Также применяется четырехпроводная схема включения термопреобразователя, которая в симметричном мосте исключает влияние сопротивления соединительных проводов независимо от равенства их сопротивлений.
При двухпроводной схеме включения термопреобразователя погрешность может быть подсчитана, если известны градуировка термометра, температура окружающей среды и сопротивление соединительных проводов при нормальной температуре (20°С).
Пересчет величины сопротивления проводов при нормальной
температуре R20 на сопротивление при данной температуре производится
по формуле ![]() .
.
Если соединительные провода медные (температурный коэффициент
а=0,004), подсчет может производиться по формуле ![]() .
.
Проверка основной погрешности термопреобразователя сопротивления
Количество отсчетов при каждом значении температуры – не менее 4.
Значение температуры рассчитывается по формуле
 ,
,
где n – число измерений;
ti
– значение температуры, измеряемой термопреобразователем, °С. Основную
погрешность вычисляют по формуле ![]() ,
,
где td – действительное значение температуры, измеряемое эталонным средством.
Раздел 5. Опытное применение интеллектуальных датчиков ПГ «Метран»
5.1 Разработка интеллектуальных датчиков ПГ «Метран»
Температура – важнейший параметр технологических процессов многих отраслей промышленности. Внедрение прогрессивных технологий повышает требования к точности измерений температуры. Одновременно с этим усложнение процессов производства заставляет расширять диапазоны измерений температуры и изыскивать новые методы ее измерений в более сложных производственных условиях.
Понятие «новизны в термометрии ПГ «Метран»» связала с разработкой новых конструкций и применением новых материалов и технологий.
Технология изготовления термоэлектрических преобразователей из термопарного кабеля КТМС с применением импульсной лазерной сварки рабочего спая ранее использовалась только на предприятиях атомной энергетики и военной промышленности и была закрыта для широкого использования. В настоящее время кабельные термопреобразователи стали доступны для применения в различных отраслях промышленности и научных исследованиях.
Именно на базе термопарного кабеля и лазерной сварки ПГ «Метран» была разработана серия термопреобразователей ТХА/ТХК Метран-200.
В номенклатуру продукции вошли также термопреобразователи сопротивления медные (50М, 100М) и платиновые (50П, 100П, РПОО, Р1500, Р11000) разных конструкций, с одним и двумя чувствительными элементами.
За эти годы освоено производство как самых простых термопар и термометров сопротивления, так и современных микропроцессорных датчиков температуры.
Например, ПГ «Метран» предлагает датчики температуры с унифицированными выходными сигналами серии Метран-270, Метран-270МП имеющими широкий модельный ряд, включающий общепромьштенное, взрывозащищенное(Ех1а,Ехф исполнения и 15 вариантов защитной арматуры.
Применение этой серии датчиков дает возможность построения АСУ ТП без дополнительных нормирующих преобразователей.
Микропроцессорный преобразователь датчиков Метран-270МП позволяет перенастраивать диапазон измерений и перепрограммировать номинальную статическую характеристику в случае замены чувствительного элемента на другой тип.
Российские интеллектуальные датчики температуры Метран-280 с поддержкой коммуникационного протокола НАРТ, позволяют создавать глобальные АСУ ТП с минимальными затратами.
Микропроцессорная электроника Метран-280 позволяет повысить точность измерений. Одновременно технология НАРТ-протокола позволяет по одной паре проводов передавать и аналоговый 4-20 мА, и цифровой сигналы, что дает возможность использовать уже имеющиеся коммуникации для аналоговых сигналов.
Мы можем дистанционно принимать необходимую информацию от полевых датчиков Метран-280 и осуществлять диагностику и настройку, используя для этого коммуникатор Метран-650 или компьютер с программным обеспечением H-Master. Приведенные функции особенно высоко оцениваются, когда датчики расположены в труднодоступных местах и на больших расстояниях друг от друга.
Непрерывная самодиагностика Метран-280 обеспечивает оперативность проведения ремонтных и профилактических работ, т.к. в случае неисправности датчик немедленно выдает сигнал о возникновении нештатной ситуации (сбоя) в конкретном блоке. Также немаловажен экономический эффект от эксплуатации датчиков с микропроцессорами из-за быстрой окупаемости первоначальных вложений и минимальной стоимости владения.
5.2 Преобразователи температуры «Метран-280»
ИНГ состоит из первичного преобразователя температуры и электронного модуля (ЭМ) с выходными сигналами:
– аналоговым 4-20 мА:
– цифровым HART версии 5 с физическим интерфейсом Bell-202.
ИНГ имеют термоэлектрический хромель-алюмелевый (ТХА) чувствительный элемент (ЧЭ) или резистивный платиновый ЧЭ (ТСП).
Измеряемый параметр – температура в ИНГ Метран-286 с помощью ГОТГ преобразуется в изменение омического сопротивления платинового ЧЭ. Аналоговый сигнал поступает на вход ЭМ, преобразуется с помощью аналогово-цифрового преобразователя (АЦП) в дискретный сигнал. Дискретный сигнал с помощью микропроцессорного преобразователя (МП) обрабатывается с целью:
– линеаризации НСХ ЧЭ 11111;
– перестройки диапазонов измерения в пределах рабочего диапазона температур;
– самодиагностики составляющих узлов ЭМ;
– детектирования обрыва или короткого замыкания ППТ.
С выхода МП дискретный сигнал поступает на цифро-аналоговый преобразователь (ЦАП), осуществляющий преобразование дискретного сигнала в унифицированный токовый аналоговый сигнал 4-20 мА, а также на блок частотного модулятора, преобразующий дискретный сигнал в частотно модулированный и наложенный на аналоговый сигнал.
В ИНГ Метран-281 измерение температуры основано на явлении возникновения в цепи термопреобразователя термоэлектродвижущей силы при разности температур между его рабочим и свободными спаями. В ЭМ дополнительно к описанным выше функциям происходит компенсация изменения температуры холодных спаев.
5.3 Hart modem «Метран-681»
HART модем Метран-681 (далее модем) предназначен для согласования (связи) персонального компьютера или средств автоматизированных систем управления технологическими процессами с интеллектуальными датчиками давления Метран-100, интеллектуальными преобразователями температуры Метран-280 и другими устройствами, поддерживающими HART протокол.
Конструктивно HART модем Метран-681 выполняется для монтажа на DIN-рейку.
Модем взрывозащищенного исполнения может применяться с датчиками, установленными во взрывоопасных зонах, в которых возможно образование взрывоопасных, смесей газов, паров, горючих жидкостей с воздухом. При этом модем устанавливается во взрывобезопасных помещениях. Модем имеет особовзрывобезопасный уровень, обеспечиваемый видом взрывозащиты по ГОСТ Р 51330.10 «искробезопасная электрическая цепь» (ia) с маркировкой по ГОСТ Р 51330.0 ExialICT5 X.
Вид климатического исполнения модема – УХЛ3.1 по ГОСТ 15150, но для работы при температуре от 0 до 50 °С.
5.4 Конфигуратор «Метран-671»
Конфигуратор Метран-671 предназначен для обеспечения связи нормирующих микропроцессорных преобразователей Метран 642, Метран 643 с персональным компьютером при проведении их настройки и калибровки. Конфигуратор обеспечивает связь микропроцессорного нормирующего термопреобразователя с персональным компьютером типа IBM PC по последовательному интерфейсу RS-232.
5.5 Обработка результатов измерений
На рис. 5.2. приведена схема внешних электрических соединений ИНТ «Метран-286», HART-модема и ПК.
Для работы с получаемыми данными применяется конфигурационная программа Н – Master,имеющая удобный пользовательский интерфейс на русском языке (рис.5.3) и позволяющая выполнять:
– считывание переменных процесса;
– считывание информации о HART-устройстве и сенсоре;
– тест устройства;
– настройку HART-устройства и сенсора;
– настройку ЦАП;
– архивирование параметров.